应用于直升机/舰动态配合的舰面流场建模仿真关键技术
2014-03-24
(海军航空工程学院青岛校区,山东青岛266041)
直升机/舰动态配合,主要是指在海上紊流、载舰运动、舰面非定常流场、舰面设备障碍、视线不佳等因素共同作用下舰载直升机在直升机进场/离场、起飞/降落阶段与载舰相互配合完成起降等任务的过程[1]。该研究最有代表性的是美国于1998年实施的JSHIP(Joint Shipboard Helicopter Integration Process)计划[2],意图通过研究和试验验证,增加联合军事行动中空军和陆军直升机在海军舰艇上操纵的能力。
随着计算机技术和湍流理论的高速发展,运用CFD分析舰面流场成为方便的手段。另一方面,直升机飞行仿真技术的进步也为直升机在舰尾流中的空气动力学分析奠定了基础。国外在此领域开发了FLIGHTLAB[3-4],GENHEL[5]等直升机飞行仿真软件,经过大量的试验验证并得到广泛应用。由此,将CFD技术与直升机飞行仿真结合起来研究直升机/舰动态配合问题成为一条可行的思路。国外已经开展的相关研究,依照各自研究目标的区别有不同的侧重点,可总结为2类:一是对CFD流场仿真精度及其影响因素的研究[6-10];二是关注直升机的实时仿真和飞行模拟器的开发[11-12]。
综合以上分析认为,采用舰面流场CFD仿真与直升机飞行动力学仿真结合的思路开展研究是较为可行的方案。诚然,CFD手段模拟舰面尾流也存在着一些问题,例如舰船几何外形的简化可能造成流场失真,湍流模型的采用导致的耗散问题,网格精度有限、求解格式精度等问题都可能对结果造成影响。但在目前研究的范围内,使用成熟的CFD和飞行仿真技术为依托,对动态配合中的影响因素全面地分析,并采用尽可能高的建模精度处理各个单元,能够提供目前需要的足够好的结果;同时,流场数据作为直升机飞行动力学仿真的输入条件,对动态配合过程仿真的影响很大,对其仿真精度的提高是研究的重要方向。
1 动态配合过程中的影响因素分析
直升机/舰动态配合的复杂性来源于2个方面:一是动态配合过程中气流场始终是变化的、非定常的;二是整个过程中受到的影响因素很多,并且各因素之间大多存在着耦合关系。鉴于问题的复杂性,这里将讨论直升机/舰动态配合的各影响因素及其相互作用,并对模型进行适当假设和简化。
直升机/舰动态配合特性的模型单元有:海面风、舰的物理模型、海面波浪、舰的运动模型、直升机飞行动力学模型,各模型单元间的耦合关系见图1。

图1 直升机/舰动态配合模型单元耦合作用示意图Fig.1 Coupling effect schematic diagram of model units in helicopter/ship dynamic interface
由图1可见,各模型单元之间的影响最终都通过舰面流场与旋翼尾流场2 者之间的影响发挥作用、这也是直升机/舰动态配合的关键和仿真的难点。模型单元之间影响分析如下。
1)①、②为舰面流场仿真过程,此过程国内外研究已很完善。
2)海面对舰面流场的影响(③)指舰面流场计算中海面作为控制域的边界条件对流场的作用,由于舰面距离海面有相当的距离,海面对大气来流的粘性作用可以忽略不计,因而通常将海面边界条件设置为无粘的光滑固壁[13-14]。
3)④是依据海况研究舰船运动规律的过程,对于动态配合研究来说,可以不作详细考虑,而直接将舰的运动模型作为输入条件。舰的运动对直升机/舰动态配合的影响体现在3个方面:一是直升机着舰过程中,舰船的摇晃、升沉使驾驶员对舰船位置、直升机与舰的相对距离难以把握并由此造成很大的心理压力,一般认为舰船运动对驾驶员的目视操纵有一定影响[15],对人在回路仿真应予考虑,非人在回路仿真可忽略;二是舰的运动造成的舰面流场随之进行的周期性变化(⑤);三是旋翼尾流作用在甲板上产生的舰面效应并因舰的运动形成动态“舰面效应”[16-18](⑥)。对于⑤,海面风作用下的舰面流场本身就是非定常的,考虑舰的运动将使问题变得极为复杂。国外在研究动态配合问题时对该影响也从未予以考虑。另外本文分析,虽然舰的运动幅度很大但频率并不高,所引起的舰面气流速度变化不快,相比之下,垂直方向上旋翼诱导速度远大于舰的升沉速度。因此,考虑了甲板运动对旋翼气流影响之“动态舰效”意义远大于前者。
4)过程⑦是直升机按照舰尾流提供的速度场计算旋翼载荷并进行全机仿真的过程,其具体方案将于后面进行讨论。在流场计算中,只考虑⑦忽略⑧被称为单向耦合,一般采用速度的叠加原理[19]。有关动态配合的绝大多数研究没有考虑⑧的影响,文献[20]对直升机和舰尾流之间的特殊区域的干扰进行了全耦合仿真,设计了飞行仿真软件和CFD流场计算软件之间的接口,在流场计算迭代过程的每一步之后都将结果实时传给对方作为初始条件。但需要注意:一是整个过程的计算量极为庞大,需要的计算机硬件的规模惊人,一般难达到;二是从全耦合仿真结果来看,该方案对于流场图像的影响较大,但是反映到研究动态配合所注重的舰载环境对于直升机操纵的影响上要小很多。鉴于舰面不同位置处2种流场影响系数的大小,可作如下分区处理:在直升机远离舰面和上层建筑的区域,流场的改变对直升机操纵产生的影响甚微;接近甲板时,该影响作为“舰面效应”予以考虑;在接近上层建筑时产生所谓“陡壁效应”,这一效应改变了旋翼诱导的速度分布,等同于“有限区域内悬停地效”[19]可在进一步的研究中予以考虑。
5)过程⑨是直升机飞行动力学仿真过程,由旋翼的气动/动力学模型、机身气动/运动学模型、尾桨气动模型、平尾动力学模型、发动机模型等各个部件组成。
2 舰面流场的CFD仿真
运用成熟的CFD 软件对舰面及其周围流场进行计算,内容包括舰体三维建模、计算域网格划分、流场求解等。
例如,某LHA舰的水线以上三维模型及其计算域网格划分如图2所示。
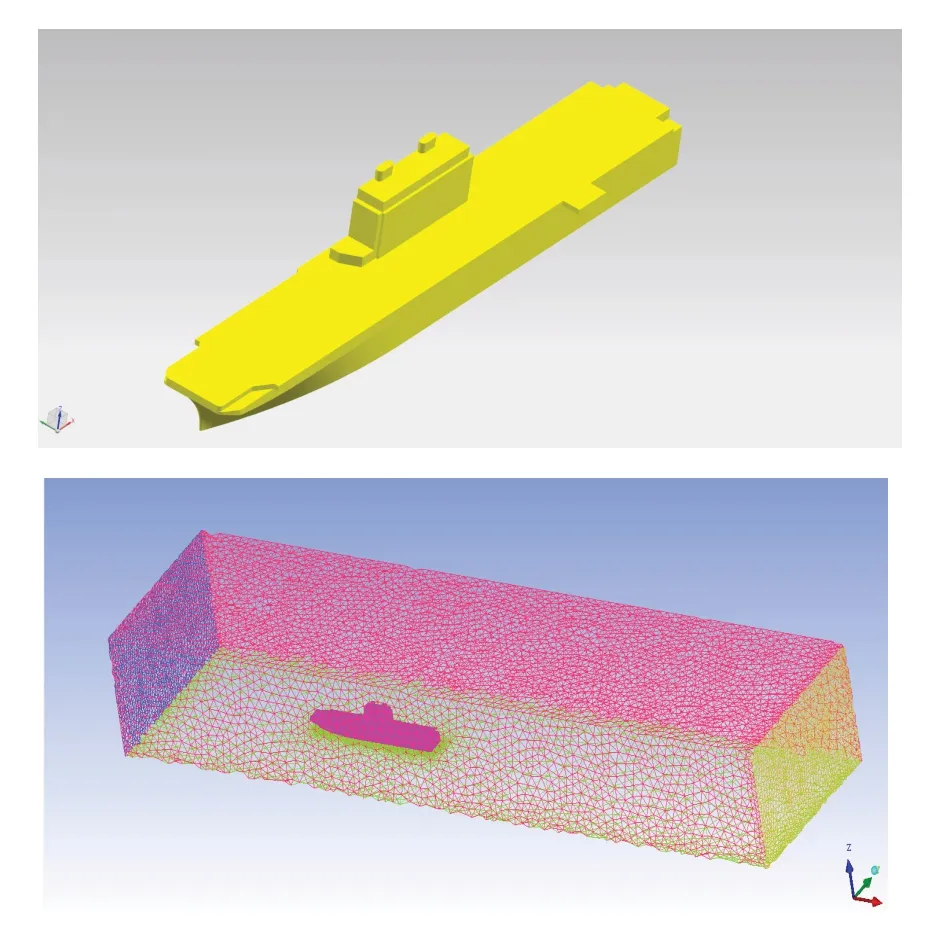
图2 LHA三维模型及外流场网格划分Fig.2 LHA 3D model and its external flow gridding division
2.1 求解设置
求解一般不考虑温度的变化,采用三维非定常粘性不可压缩流动的控制方程。
1)连续方程为

式中,ui为速度矢量u 在xi方向上的分量。
2)粘性不可压流体的动量守恒方程为

式中:p为压力;ρ为流体的密度;υ为流体的运动学粘性系数;t代表时间;fi表示体积力。在此计算中,时间体积力即重力忽略不计。
有关舰面流场的定常N-S 方程的计算,国内外进行了大量的研究[21-24],风洞试验中表现的粘性—涡相互干扰的流场特征在仿真中都被反映出来;且在某些特定的飞行路径上计算结果与风洞试验数据吻合良好。然而研究不同的湍流模型如Laminar N-S、MILES、k-ε和SST 等[25-28],发现稳态CFD 解不能预测紊流场的时均值,并且湍流模型在计算中加入了太多的耗散。
数值求解通常采用商用CFD软件FLUENT,求解器为适合低速不可压流动求解的基于压力的求解器以及耦合求解方法,控制方程的时间空间离散格式为二阶迎风格式。
依照文献[29]给出的建议,舰艏距上游入口边界1倍舰长,舰艉距下游出口边界2.5倍舰长,以此确定本研究的计算域为:1 125 m×400 m×200 m,则XY 平面内阻塞率为0.6%,YZ 面阻塞率约为0.6%,XZ 面阻塞率约为2.54%,满足计算域阻塞率的要求。
2.2 算法实施
鉴于传统湍流模型难以处理包含大分离区的高雷诺数外流问题以及大涡模拟在该问题上的局限性,Spalart提出了当前使用的这种湍流模型DES[30]。最近的研究表明,DES 生成的舰船尾流频谱比非定常RANS方法更接近实验数据[11]。它修正了Spalart-Allmaras(S-A)模型中距离壁面的距离d 成为

在未修正的S-A模型中,d是产生涡粘的尺度大小。通过应用新的长度度量d~,将其大小与当地网格步长Δ 联系起来,在远离壁面的区域,涡粘的产生是很有限的,使得DES可以明确地处理中型到大型的网格。常数CDES默认值为0.65,该值经过多次验证取值是合适的。
1)时间步长设定:基于乃奎斯特判据,时间步长的设置要保证控制域中的当地CFL数不超过1。假设流场中Umax=1.5U∞,利用Δt=Δ0/Umax,得Δt=0.01 s,然后用船舷长度和自由流速度对其进行无量纲化。对仿真关于时间步长的敏感度进行分析,认为可以采用更高的频率来分析湍流能量的发展,但是这些频率都远高于直升机气动响应的频率范围(1~2 Hz),因此目前设置的时间步长是合适的。
2)工况设定:为获得流场在不同风向下的图像模式,设置风向从左舷90°经船头到右舷90°每30°一个状态,共7个工况。
3)数据记录:每一工况计算解需要记录40s的数据以完成记录流场中可能出现的周期性变化情况,因而需要进行的迭代步数为4 000次,其中的1 000次迭代数据视为流场的初始化而被省略。而对剩下的3 000次迭代进行记录。
3 针对动态配合的舰面流场数据处理
动态配合采用的CFD 数据是一段时间内以时间步长(如0.1 s)生成的速度变化数据,但飞行仿真中采用的时间步长及速度数据的格式与舰面流场结果可能并不一致。因此,需要对舰尾流场的数据进行重构。
3.1 坐标转换
首先,由于数据格式的不同,需要将非结构网格CFD 数据经过插值得到矩形网格中的CFD 流场数据。CFD 得到的舰尾流速度场是基于舰体坐标系定义的,因而该速度场首先需要转换到惯性坐标系中;然后,再转换到直升机各部件计算所采用的特定坐标系中。对于机身、平尾和尾桨,需要进行下面的转换:

式(4)中:vs是在舰体坐标系中的舰尾流速度;vb是直升机机体坐标系中的舰尾流速度;是从舰体坐标系到惯性坐标系的坐标转换矩阵;是从惯性坐标系到机体坐标系的坐标转换矩阵。
对于主旋翼的每个叶素来讲,舰尾流速度要经过下式转化到桨叶坐标系中:

式(5)中:vr是桨叶坐标系中的舰尾流速度;是从机体坐标系到桨毂坐标系的坐标转换矩阵;是从桨毂坐标系到桨叶坐标系的坐标转换矩阵。
3.2 时间延拓
由于存储的舰尾流的速度信息只能是有限时间内的(如40 s),而直升机/舰动态配合的过程很可能超过此时间范围,因而需要将速度—时间历程延长。可采取的方案是将已获得数据进行周期性拓延,但此时流场的40 s时刻的速度信息与0时刻的速度信息通常不是相等的,为防止速度场出现突变,可将流场35 s~40 s的数据与0~5 s 数据进行融合,即在连接处产生5 s的重叠,设计一个算法(如正弦滤波器)计算新产生的流场速度,如图3所示。
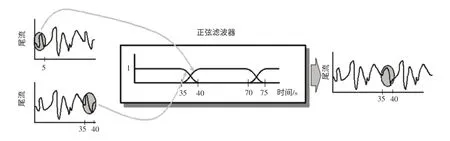
图3 拓延尾流数据采用的正弦函数法Fig.3 Sine function method used in flow data extension
3.3 空间匹配
鉴于尾流数据的时间步长与飞行仿真的时间步长不一,需要首先采用一个简单的线性插值重新计算尾流速度场以匹配飞行仿真的频率。进一步的动态配合仿真中,将对多区域、多路径经过的直升机提供流场数据。依据下列条件选择不同空间的控制域提取流场数据:进场/离场方位角;执行的任务阶段——进场/离场或者横越甲板等;起降点位置的不同。
通过截取特定空间区域内的流场数据可为直升机在特定轨迹上提供入流信息。直升机各气动部件经过一定的简化对流场数据的引用采用24点模型,该模型由美国ART 公司提出,通过对旋翼桨叶分段、机身特定点、尾桨和平尾等主要气动部件的特征点提取,简化了计算效率。
3.4 轨迹仿真
建立目标直升机的各部件空气动力学模型,以上述空间流场数据为输入条件,在特定的着舰/离舰或其它动态配合要求科目的飞行轨迹上进行仿真,对直升机姿态角变化、稳定性和操纵性进行评价。直升机/舰动态配合的过程可分为3个典型阶段进行仿真:甲板“悬停”、横越甲板、进场/离场,见图4。
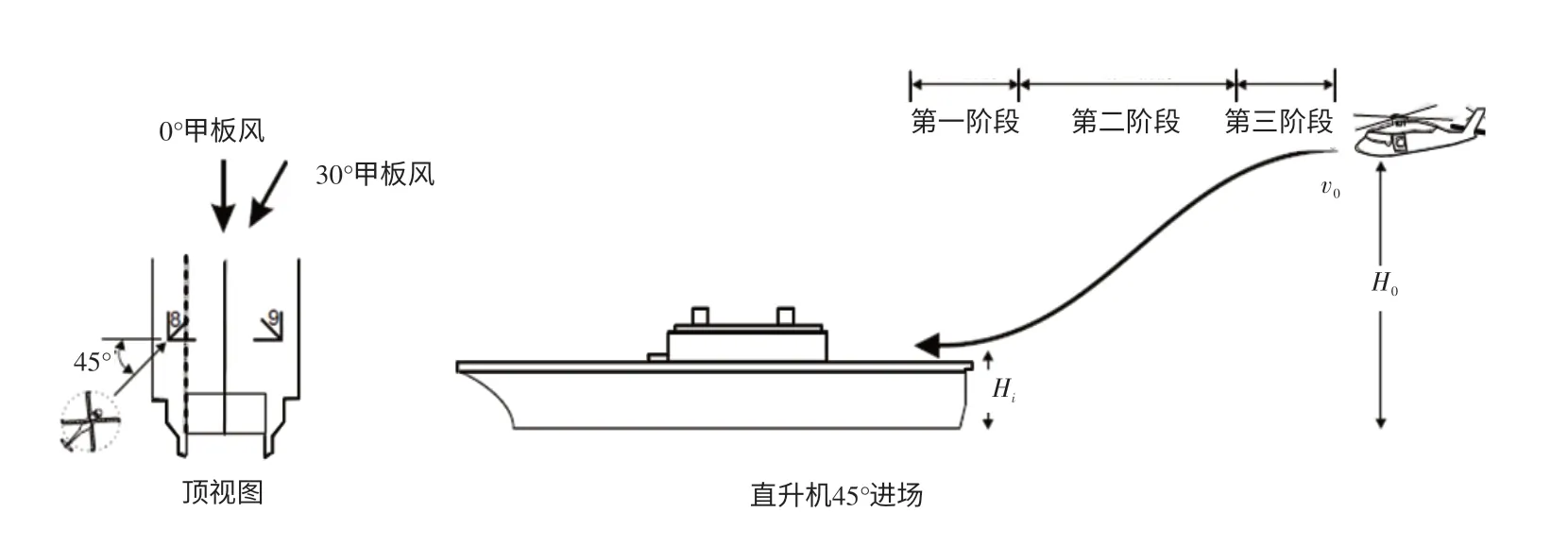
图4 直升机在LHA上着舰过程Fig.4 Process of helicopter landing on LHA
4 结论
直升机/舰动态配合性能关系到舰载直升机的飞行安全和作战效能的发挥,随着计算机仿真科学的发展,逐渐从海上试验转向以仿真研究为主要研究手段。然而由于机舰配合影响因素众多、过程复杂,要得出对直升机的舰载操纵有指导意义的结论,既需要对涉及的单元模块进行精确建模,又要根据实际情况进行适当简化,得到适合当前任务需求的仿真思路。通过分析,本文主要对直升机/舰动态配合仿真研究现状和研究思路得出如下结论:
1)以舰面流场的CFD仿真结果作为输入,进行直升机全机的空气动力学仿真,得出直升机在舰载特殊环境下的操纵性和稳定性,是进行动态配合仿真研究的一条可行思路。
2)旋翼尾流场和舰面流场2种非定常流场相互耦合、难以精确求解,在舰面上方不同位置处考虑其最关键影响因素即可,主要是直升机接近甲板时产生的“舰面效应”和“陡壁效应”。
3)舰面流场仿真结果是一段时间内的速度场分布,作为直升机飞行仿真的输入时存在坐标系、时间、频率、空间上的不匹配,因而飞行仿真的首要步骤是对舰尾流场的重构。
[1]陈碧云.直升机:舰载与海上作战[M].北京:海洋出版社,2003:78-79.
CHEN BIYUN.Helicopter:shipboard and maritime conduct[M].Beijing:China Ocean Press,2003:78-79.(in Chinese)
[2]ROSCOE M F,WILKINSON C H.DIMSS-JSHIP’s modeling and simulation process for ship/helicopter testing and training[C]//AIAA Modeling and Simulation Technologies Conference and Exhibit.Monterey CA:AIAA,2002:272-275.
[3]ROY C WAGNER.Procedural guide for modeling and analyzing the flight dynamics of the SH-60B helicopter using Flightlab[D].Monterey California:Naval Postgraduate School,1995.
[4]GEOFFREY J J,KRISTOPHER S,CHRISTOPHER B.Combining simulink and flightlab for handling qualities and crew station prototyping[C]//64th AHS.Montreal:AIAA,2008:113-118.
[5]ADVANCED ROTORCRAFT TECHNOLOGY Inc.Flightlab/scode theory manual[M].California:AIAA,1998:l53-157.
[6]DOOYONG L,NILAY S.Simulation of helicopter shipboard launch and recovery with time-accurate airwakes[C]//AIAA Atmospheric Flight Mechanics Conference and Exhibit.Rhode Island:AIAA,2004:360-378.
[7]WILKINSON C.H,ROSCOE M F.Determining fidelity standards for the shipboard launch and recovery task[C]//AIAA Modeling and Simulation Technologies Conference and Exhibit.Montreal:AIAA,2001:583-590.
[8]ADVANI S K,WILKINSON C H.Dynamic interface modelling and simulation- a unique challenge[C]//The Royal Aeronautical Society Conference on Helicopter Flight Simulation.London,2001:69-88.
[9]WILKINSON C H,G M VANDER.Modeling and simulation of the ship-helicopter environment[C]//56th AHS.Virginia:AIAA,2000:456-469.
[10]LINCOLN P E.A preliminary study of the airwake model used in an existing SH-60B/FFG-7 helicopter/ship simulation program[R].Australia:Department of Defence Science and Technology Organisation,1994:286-294.
[11]FORREST J S,OWEN I.Detached-eddy simulation of ship airwakes for piloted helicopter flight simulation[C]//1st International Aerospace CFD Conference.Paris,2007:130-152.
[12]FORREST J S,STEVEN J H.Towards fully simulated ship-helicopter operating limits:the importance of ship airwake fidelity[C]// 64th AHS.Montreal:AIAA,2008:236-245.
[13]陆超,姜治芳,王涛.不同工况条件对舰船舰面空气流场的影响[J].舰船科学技术,2009,31(9):38-42.
LU CHAO,JIANG ZHIFANG,WANG TAO.Influence of different airflow situation for ship airwake[J].Ship Science and Technology,2009,31(9):38-42.(in Chinese)
[14]陆超,姜治芳,王涛.两种飞行甲板形式的舰船空气流场特性比较[J].舰船科学技术,2009,31(7):29-31.
LU CHAO,JIANG ZHIFANG,WANG TAO.A comparison of ship’s airwakes with different flight decks[J].Ship Science and Technology,2009,31(7):29-31.(in Chinese)
[15]晁祥林.直升机舰上使用限制的确定[J].飞行试验,1984,14(4):22-28.
CHAO XIANGLIN.Deternmination of limitation in using helicopter on ship[J].Flight Test,1984,14(4):22-28.(in Chinese)
[16]ITOGA N,NAGASHIMA T.Numerical analysis of ground effect for a lifting rotor hovering above close proximity to inclined flat surface[C]//Proceedings of AHS International Meeting on Advanced Rotorcraft Technology.Japan,1998:136-153.
[17]ITOGA N,IBOSHI N.A new numerical method for predicting aero-mechanical behaviors of a rotor hovering at close proximity to inclined flat surface[C]//55th AHS.Montreal:AIAA,1999:68-79.
[18]孙文胜,毕玉泉,白春华.舰载直升机的舰面效应研究[J].航空计算技术,2006,36(2):9-12.
SUN WENSHENG,BI YUQUAN,BAI CHUNHUA.Research on shipboard effect of naval helicopter[J].Aeronautical Computing Technique,2006,36(2):9-12.(in Chinese)
[19]TERESA A Q.Rotor performance in the wake of a large structure[C]//65th AHS.Texas:AIAA,2009:330-346.
[20]EMRE ALPMAN.Fully-coupled simulations of the rotorcraft/ ship dynamic interface[C]//63th AHS.Virginia,2007:632-645.
[21]TAI T C.Simulation of DD-963 ship airwake by navierstokes method[J].Journal of Aircraft.1995,32(6):1399-1401.
[22]TAI T C,Simulation and analysis of lhd ship airwake by navier- stokes method[C]//NATO RTO Symposium on Fluid Dynamics Problems of Vehicles Operating near or in the Air-Sea Interface.Amsterdam,1998:331-338.
[23]ZAN S J.On aerodynamic modelling and simulation of the dynamic interface[C]//Proceedings of the Institution of Mechanical Engineers Part G-Aerospace Engineering.2005:393-410.
[24]ROPER D M,HODGE S J,OWEN I.Integrating CFD and piloted simulation to quantify ship-helicopter operating limits[J].Aeronautical Journal,2006(110):419-428.
[25]POLSKY S A,BRUNER.Time-accurate computational simulations of an lha ship airwake[C]//18th AIAA Applied Aerodynamics Conference.Denver:AIAA,2000:1205-1212.
[26]POLSKY S A.A computational study of unsteady ship airwake[C]//40th AIAA Aerospace Sciences Meeting &Exhibit.Nevada:AIAA,2002:286-294.
[27]TATTERSALL P,ALBONE C M.Prediction of ship air wakes over flight decks using CFD[C]//AGARD Fluid Dynamics Symposium on Fluid dynamics of Vehicles Operating Near or In the Air-Sea Interface.Amsterdam,1998:210-223.
[28]LIU J,LONG L N.Higher order accurate ship airwake predictions for the helicopter-ship interface problem[C]//54th AHS.Washington D C:AIAA,1998:118-136.
[29]RYAN M C,POLSKY S A.LHA airwake wind tunnel and CFD comparison with and without bow flap[C]//22nd Applied Aerodynamics Conference and Exhibit.Rhode Island:AIAA,2004:880-897.
[30]SPALART P R,JOU W H.Comments on the feasibility of LES for wings and on a hybrid RANS/LES approach[C]//1st AFOSR International Conference on DNS/LES.Ruston L A,1997:352-362.
[31]FORREST J S,OWEN I,PADFIELD.Detached-eddy simulation of ship airwakes for piloted helicopter flight simulation[C]//1st International Aerospace CFD Conference.Paris,2007:189-196.
