基于非线性动态系统辨识的 D-FNN算法研究*
2014-03-23杨文茵张德丰王传胜
杨文茵,张德丰,王传胜
(1.佛山科学技术学院计算机系,广东 佛山 528000;2.暨南大学计算机科学系,广东 广州 510000)
本文将模糊逻辑和神经网络相结合,利用神经网络实现模糊化、模糊规则表达、模糊逻辑推理和反模糊化过程,提出了自适应学习方法,克服了基于先验知识确定模糊规则及网络结构的困难[1]。模糊逻辑、神经网络和模糊神经网络是智能计算这门交叉科学的基本内容,近年来他们都得到了飞速的发展并获得了广泛的应用。多学科算法的相互交叉、相互渗透可以进一步促进现代科学技术的发展[2]。
1 RBF神经网络的学习算法
1.1 模糊神经网络的结构
D-FNN(动态模糊神经网络)的结构是基于扩展的RBF(径向基)神经网络。RBF神经网络具有单隐层的三层前馈网络,RBF结构如图1所示。由于它模拟人脑中局部调整、相互覆盖接收域的神经网络,RBF网络是一种局部逼近网络,已经证明它能以任意精度逼近任一连续函数[3]。
设网络输入n维向量u,输出m维向量y,输入/输出样本对长度为L。
RBF网络隐层第i个节点的输出为
qi=R(‖u-ci‖)
(1)
式中:
u为n维输入向量;ci为第i个隐节点的中心,i=1,2,…,s;‖·‖通常为欧氏范数;R(·)为RBF函数,具有局部感受的特性。它有多种形式,体现了RBF网络非线性映射能力[4]。
网络输出层第k个节点的输出为隐节点输出的线性组合,即
(2)
式中,wk i为qi→yk的连接权;θk为第k个输出节点的阈值[5]。
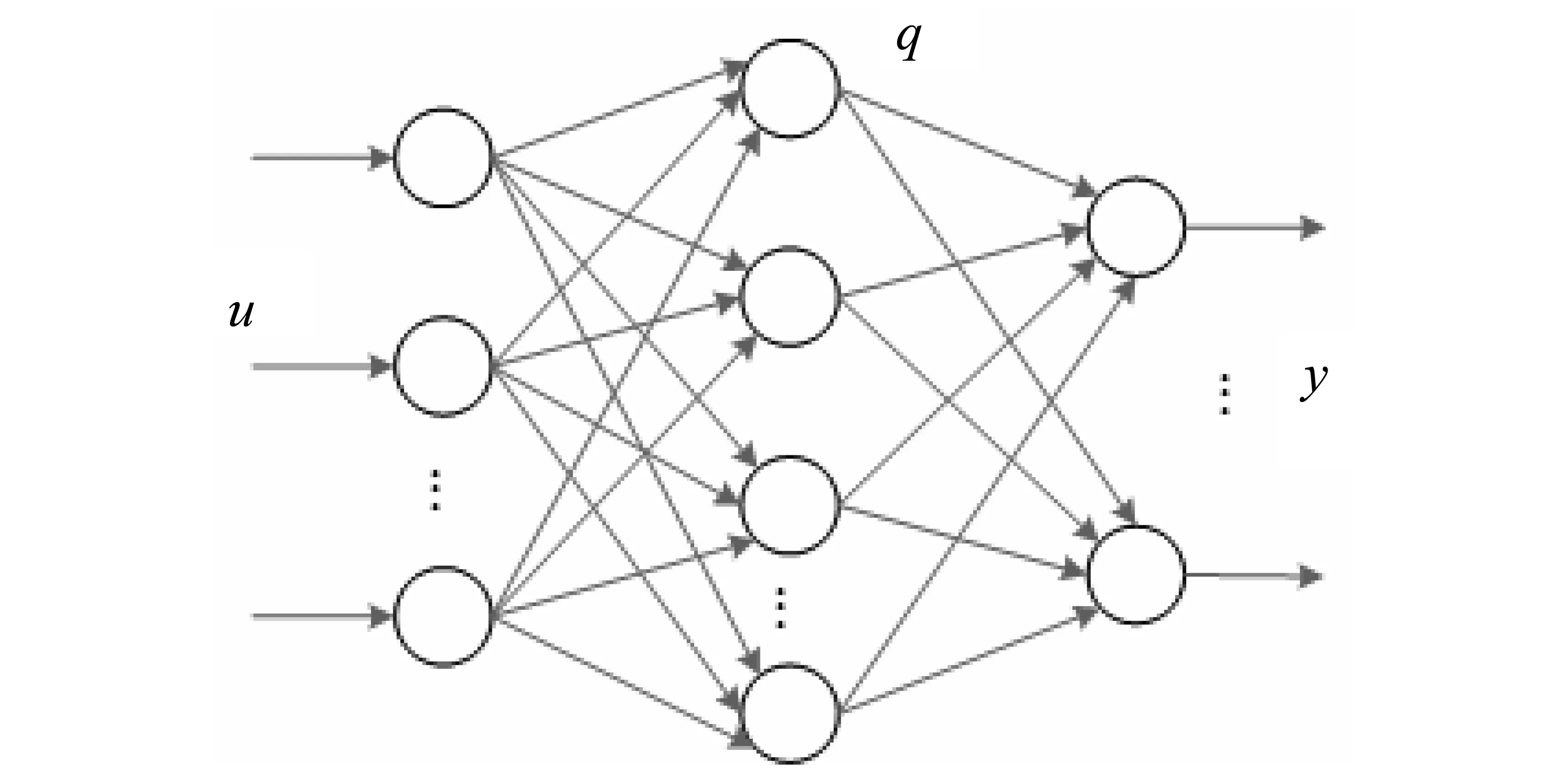
图1 RBF网络结构
设有p组输入/输出样本up/dd,p=1,2,…,L定义目标函数(L2范数)为
(3)
学习的目的是使
J≤ε
(4)
式中,yp是在up输入下网络的输出向量[6]。
高斯径向基函数网络隐节点的输出为
(5)
式中,[·]表示向量u与ci间的马氏距离。
当∑i为对角阵时,式(5)为
(6)
当∑i为单位阵时,式(5)为
(7)
作用函数是高斯径向基函数(RBF),是非线性的,即
R(h)=exp(-h)
(8)
(9)
式中,u为n维输入向量,j=1~n;ci为第i个隐节点的中心;σi为第i个隐节点的标准化参数;σij为第i个隐节点第j分量的标准化参数。RBF神经网络被广泛用于函数逼近以及模式识别中,在这些应用中,样本的维数通常很小[7]。正如Moody和Darken在文献[8]中所指出的,“RBF神经网络是最合适用于学习逼近连续的或分段连续的实值映射,其中该映射的输入维数充分的小”。
本文提出了一种动态模糊神经网络D-FNN结构及其学习算法,该模糊神经网络的结构基于扩展的径向基神经网络。其学习算法的最大特点是参数的调整和结构的辨识同时进行,且学习速度快,可用于实时建模与控制。动态模糊神经网络的结构如图2所示,共5层。在图2中,x1,x2,…,xr是输入的语言变量,y是系统的输出,MFij是第i个输入变量的第j个隶属函数,Rj表示第j条模糊规则,Nj是第j个归一化节点,wj是第j个规则的结果参数或者连接权,u指系统总的规则数。
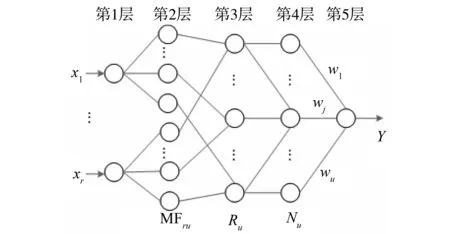
图2 D-FNN结构
1.2 神经网络用于系统辨识
如果实际系统的输出只是依赖于其当前时刻的输入,而与历史输入无关,就称这个系统是静态系统。如果系统的输出不仅依赖于以前的输出而且依赖于当前的输入,则称这类系统为动态系统。n阶动态系统通常可以用如下方程描述[9]:
y(t)=f[y(n)(t),…,y′(t),x(t)]
(10)
其中,y(t)和x(t)分别为对象的输出和输入信号,y(n)(t)为y(t)的n阶微分,它是y(t)的以前信息。如果函数f(·)非线性的,则系统(10)称为非线性动态系统。本文将研究这一类型的系统。
文献[10]指出,在较弱的假设下,任何一个非线性离散时间系统都可用如下的NARMAX(Nonlinear AutoRegressive Moving Average with eXogenous inputs)模型来描述:
y(t)=f[y(t-1),…,y(t-ny),x(t-1),…,
x(t-nx),e(t-1),…,e(t-ne)]+e(t)
(11)
其中y(t)、x(t)、e(t)分别是系统的输出、系统的输入和噪声,f是待辨识的未知函数,ny、nx、ne分别是输出、输入和噪声的最大延迟,e(t)是独立的零均值序列。作为NARMAX的一个特例,实际中经常用到如下的NARX(Nonlinear AutoRegressive with eXogenous inputs)模型:
y(t)=f[y(t-1),…,y(t-ny),
x(t-1),…,x(t-nx)]+e(t)
(12)
基于NARX模型,文献[9]对此作了进一步简化,并提出如下几个没有干扰情况下的模型。
模型Ⅰ
(13)
模型Ⅱ
(14)
模型Ⅲ
y(t)=f[y(t-1),…,y(t-ny)]+
g[x(t-1),…,x(t-nx)]
(15)
基于上述模型,文献[9]提出了如何利用神经网络来进行系统辨识。
用神经网络来进行系统辨识,一个显而易见的方法就是使神经网络或模糊神经网络的输入-输出结构选择和被辨识的系统一模一样。在实际操作上,可以有如下两种模型。
1)并行模型

(16)
2)串-并行模型

y(t-ny),x(t-1),…,x(t-nx)]
(17)

2 实验结果与分析
被辨识的对象描述如下:
(18)
这个模型广为研究人员使用,比如,文献[11]和文献[12],该对象给出的无外力系统的平衡状态分别为(0,0)和(2,2)。如果串-并行辨识模型用来辨识该对象,则这个模型可以用如下方程来表示:

其中,f是三输入单输出的D-FNN。使用同文献[13]和文献[14]相同的输入u(t)=sin(2πt/25),其结果如图3所示。其中图3(a)表示产生的模糊规则,图3(b)表示训练时的实际输出误差,图3(c)表示均方根误差。与文献[11]、文献[12]及文献[13]结果比较如表1所示。
由表1可以看到,要达到相同的训练误差,只有结构自适应的OLS方法需要65条规则,远大于D-FNN所需要的规则数。文献[11]和文献[12]也采用了修剪计算[15],其所用的规则数虽然比OLS方法少,但还是比D-FNN的方法多多了,而且训练误差比D-FNN大得多。由图3(d)可以看到,尽管D-FNN的结构很小,但其泛化能力很强。结果表明:与其它算法相比,D-FNN无论在结构上还是性能上都具有明显的优势。
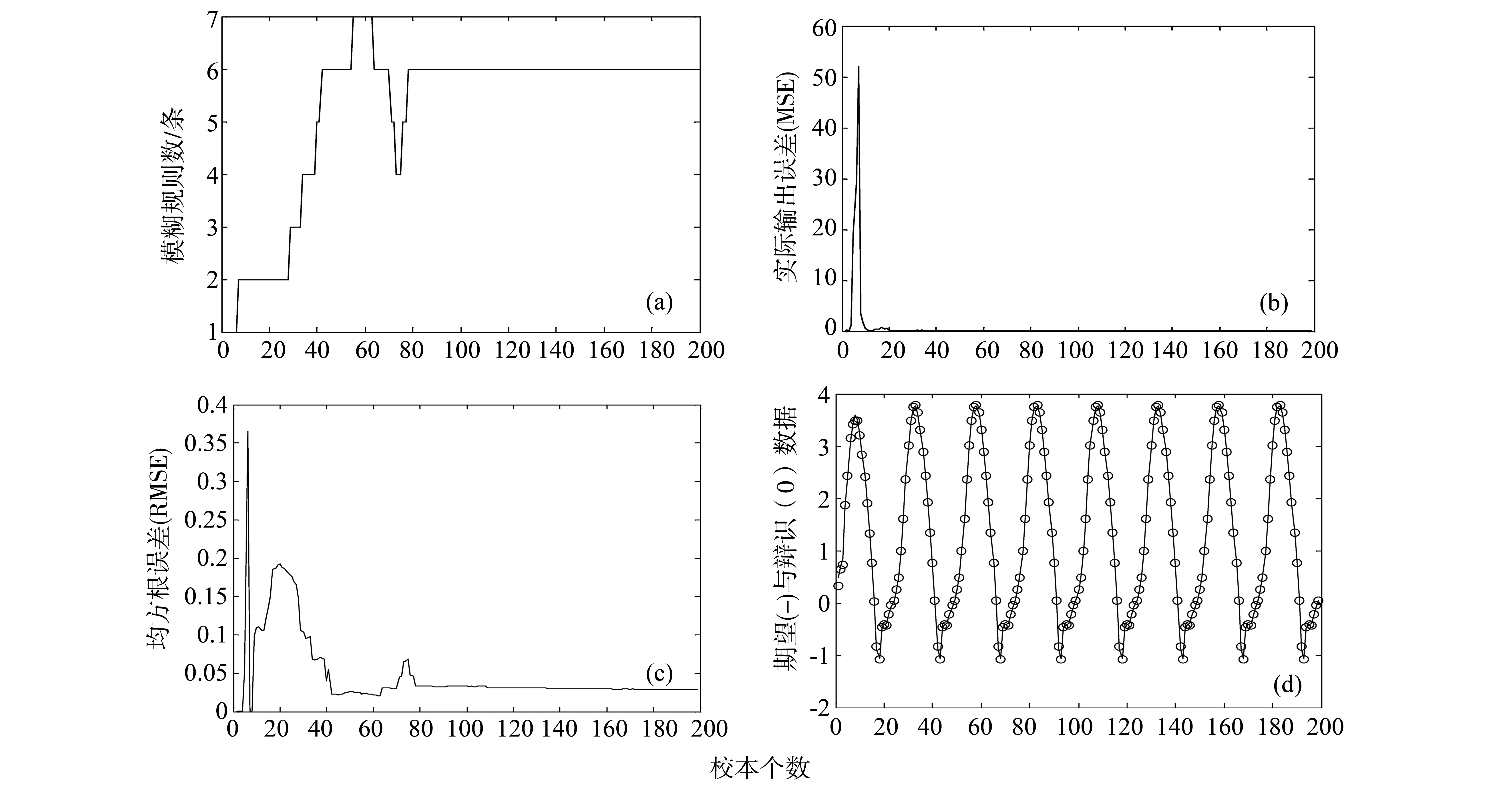
图3 非动态线性系统的辨识
表1 不同算法的性能和结构比较
Table 1 Comparison of performance and structure with different algorithms
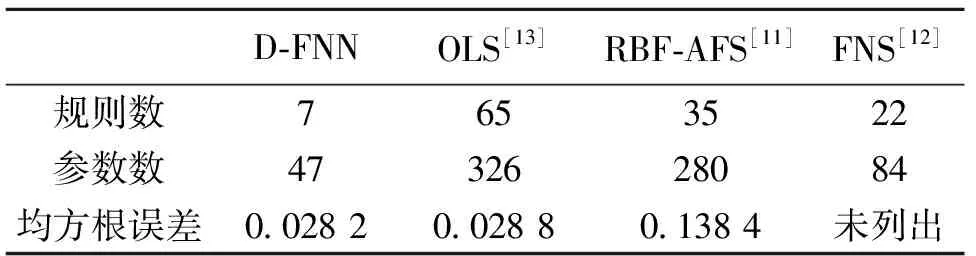
D⁃FNNOLS[13]RBF⁃AFS[11]FNS[12]规则数7653522参数数4732628084均方根误差0 02820 02880 1384未列出
为了检验D-FNN的泛化能力,设p=6,n=500。其中p为前6步预测结果,n为500个样本对。选择不同参数,将得到两种不同的神经网络结构,其训练和测试结构列于表2中。
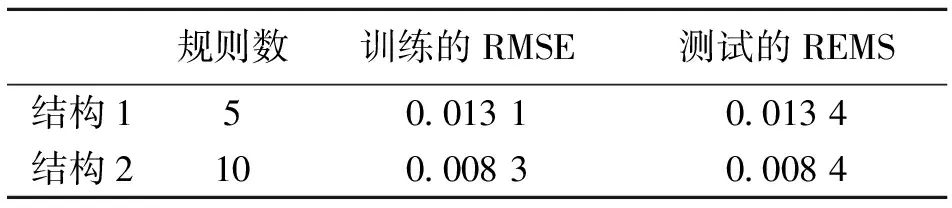
表2 n=500,p=6时训练数据的仿真结构
当p等于6,模糊规则数为10时,图4说明了D-FNN泛化性的测试,其中,前500个点用于训练,后500个点用于预测。由图4及表2可以看出,无论是采样5条规则还是10条规范,所构建的模糊神经网络都具有很强的泛化能力,因为测试误差几乎等同训练误差[16]。表3列出了D-FNN与ANFIS(基于自适应神经网络的模糊推理系统)、OLS(正交最小二乘网络)和RBF-AFS(径向基自适应模糊系统)的比较结果。
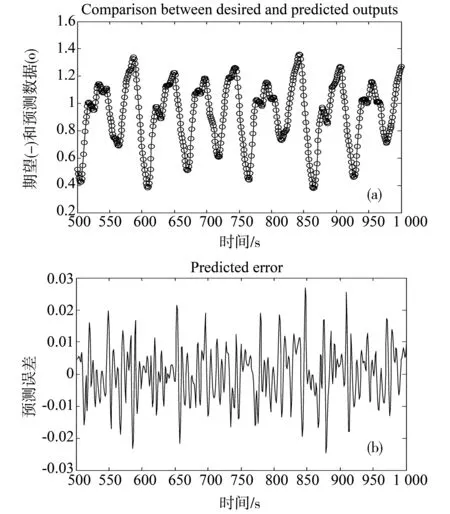
图4 D-FNN预测的测试结果
表3不同的结构和性能比较(训练条件:n=500,p=6)
Table 3 Structure and performance comparision(Training condition:n=500,p=6)

方法规则数参数的数量训练的均方根误差测试的均方根误差D⁃FNN101000 00820 0083ANFIS161040 00160 0015OLS352110 00870 0089RBF⁃AFS212100 01070 0128
比较结果显示,即使D-FNN有更多的可调参数,它的性能也并没有ANFIS好。原因是ANFIS通过迭代学习的方式训练,从而可以达到整体的最优解。而D-FNN只能获得次优的结果。然而,与RAN、RANEKF及M-RAN(它们也只能得到次优解)相比,D-FNN结构小而泛化能力更强。
3 结 论
D-FNN算法中,非线性参数是由训练样本和启发方法直接决定的,而没有用优化算法来确定,虽然高斯宽度在学习时可以自适应地调整,但学习规则却很简单。D-FNN算法中,由于分级学习策略的使用可以缓解学习过程中的震荡问题;修剪技术的应用,使得网络的结构不会持续增长。为检验D-FNN的有效性,把D-FNN与其它的学习算法进行了比较,并深入探讨这些算法与其它算法的相互关系,研究表明D-FNN具有简洁的结构和优良的性能。
参考文献:
[1]JANG J-S R.ANFIS:Adaptive-network-based fuzzy inference system[J].IEEE Transactions on Systems,Man,and Cybernetics ,2013,23(3):665-684.
[2]KADIRKAMANATHAN V,NIRANJAN M.A function estimation approach to sequential learning with neural networks[J].neural computation,2012,16(4):954-975.
[3]HONG Z Q.Algebraic feature extraction of image for recognition[J].Pattern Recognition,2011,24(3):211-219.
[4]徐丽娜.神经网络控制[M].北京:电子工业出版社,2009.
[5]WU S Q,ER M J.Dynamic fuzzy neural networks:a novel approach to function approximation[J].IEEE Transactions on Systems,Man,and Cybernetics:Part B,2000,30(2):358-364.
[6]ER M J.WU S Q.A fast learning algorithm for parsimonious fuzzy neural systems[J].Fuzzy Sets and Systems,2002,126:337-351.
[7]任爱红.模糊随机过程函数列均方差一致Henstock积分的可积性[J].中山大学学报:自然科学版,2010,51(4):41-44.
[8]MOODY J,DARKEN C J.fast leaning in network of locally-tuned processing units[J].Neural Computation,2009,1:281-294.
[9]NARENDRA K S,PARTHASARATHY K.Identification and control of dynamical system using neural networks[J].IEEE Transactions on Neural Networks,1990,1(1) :4-27.
[10]LEONTARITIS I J,BILLINGS S A.Input-output parametric models for nonlinear systems,part 1:deterministic nonlinear systems[J].International Journal of Control,2006,41(2):303-344.
[11]CHO K B,CHEN B H.Radial basic fuction based adaptive fuzzy systems and their applications to system identification and prediction[J].Fuzzy Sets and Systems,2006,83(3):325-339.
[12]CHAO C T,CHEN Y J,TENG C C.Simplification of fuzzy neural systems using similarity analysis[J].IEEE Transactions on Systems,Man,and Cybernetics,Part B:Cybernetics,2008,26(2):344-354.
[13]CHEN S,COWAN C N,GRANT P M.Orthogonal least squares learning algorithm for radial basis function network[J].IEEE Transactions on Neural Networks,2009,2(2):302-309.
[14]何正风,张德丰,孙亚民.高斯激活函数特征值分解修剪技术的D-FNN算法研究[J].中山大学学报:自然科学版,2013,52(1):34-39.
[15]伍世虔,徐军.动态模糊神经网络:设计与应用[M].北京:清华大学出版社,2008.
