全站仪反射棱镜遥控指挥系统的研制*
2014-03-22苏清磊范乃胤
苏清磊 范乃胤
(河南省计量科学研究院,郑州 450008)
0 引言
全站仪作为目前普遍应用的一种长度计量仪器,广泛应用于建筑、测绘、大型设备制造与安装等行业。全站仪测距部分的检定按照JJG 703—2003光电测距仪检定规程进行[1],其中最主要的两项技术指标加乘常数与测距综合标准差,都需要在长度基线场内采用多段基线组合比较法同时测定,在一条基线上设立7个基线点,基线可以组合为21段,全长距离不小于1000m[2-5]。检定时在基线两端分别安置全站仪与反射棱镜,各基线段上的观测均为一次照准取5个读数求其平均值。这样就需要在基线中间位置5个桩各安排一个人手,用于反射棱镜的移动与安装对位,每测量一个测回,需要人工移动反射棱镜21次,由于读数位置与反射棱镜距离较远(不小于1000m),需要用对讲机与操作人员来回确认,测量一台全站仪的测距部分误差值至少需要2个多小时,国内计量检定单位普遍采用这种办法,费时费工费力,目前国内外也无更有效办法或者类似装置解决此问题,针对这种情况,我们研制出一种全站仪反射棱镜遥控指挥系统,可以远程控制反射棱镜的状态,提高了定位精度和工作效率。
1 遥控指挥系统的原理与组成
1.1 遥控装置工作原理
根据现场测量特点,我们设计了一套遥控装置,原理如图1所示,控制端通过键盘输入控制指令(包括受控点位信息、棱镜状态信息以及特殊中断指令),ATMEGA16单片机扫描到键盘输入信息后,以基于Zigbee协议的ZIC2410无线通信芯片作为无线收发端,控制远端步进电机动作,带动棱镜达到指定位置。Zigbee是一种低复杂度、低功耗、低成本的近距离无线通信技术,本装置采用基于Zigbee标准的ZIC2410芯片和ATMEGA16单片机为核心,实现基于ZigBee标准的软硬件设计,并且工作在2.4GHz的免费频段[6]。
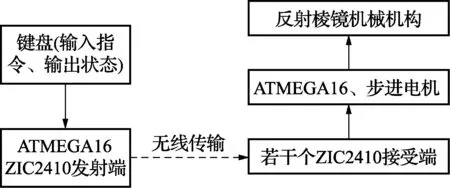
图1 遥控装置工作原理方框图
1.2 反射棱镜机械部分设计
反射棱镜机械部分结构如图2所示,整个装置安装在一个三角水平基座1上,2为调整螺旋,反射棱镜4中心与基座中心同轴,旋转电机8通过联轴器3与反射棱镜连接,反射棱镜正对待测全站仪,电机旋转平面垂直于测量方向,根据阿贝原理,由棱镜不垂直引起的基线误差为二阶误差,可以忽略不计,这样可以最大减少测量误差。在棱镜竖直位置和水平位置处安装有限位开关9,当棱镜旋转到相应触点7位置时会触发限位开关,电机停止运动。为了避免前面棱镜卧倒后对后面棱镜测距的反射光干扰,在基座水平位置加了一定颜色的遮光挡板,作用有二,一是遮挡反射棱镜的光;二是其自身不能对测距产生干扰光,为此我们选用灰色。
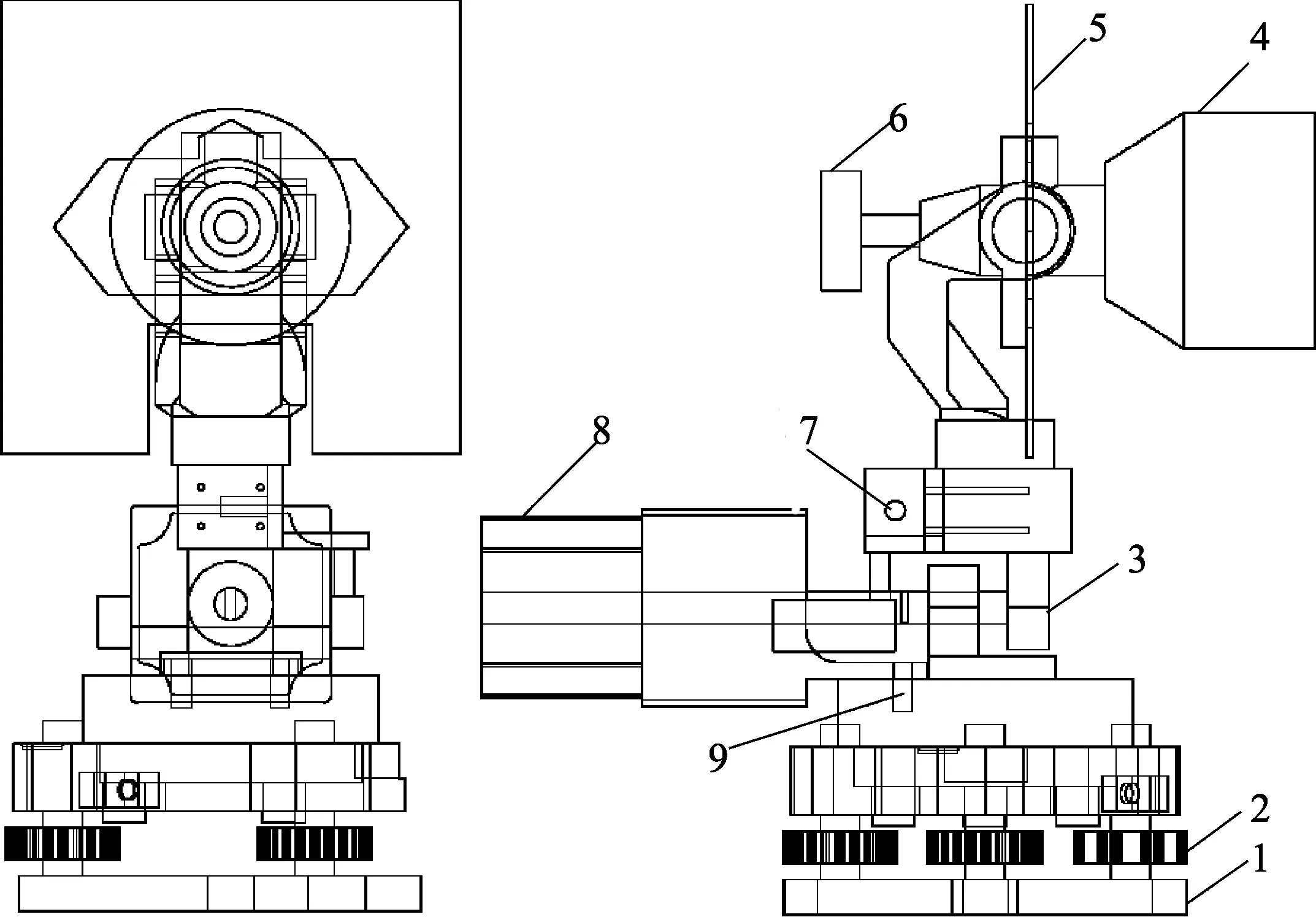
1.底座;2.调角螺旋;3.联轴器;4.反射棱镜;5.砧板;6.调整旋钮;7.触点;8.电机;9.限位开关
1.3 遥控发射接受模块
遥控反射接收模块的硬件原理图如图3所示,ATMEGA16单片机对键盘输入指令进行一定预处理后,通过基于Zigbee标准的ZIC2410无线通讯模块进行传输,接收端芯片接收到相应指令后,将动作指令通过ATMEGA16单片机转换成电机所接受的命令序列,驱动步进电机完成设计动作,限位开关给出反馈信号。运行时,首先选择控制末端(基线点),在面板处设置了若干个控制末端,根据控制需要选择相应的按键,然后选择水平、垂直、急停按钮,就可以遥控对应点位的反射棱镜达到相应的状态。
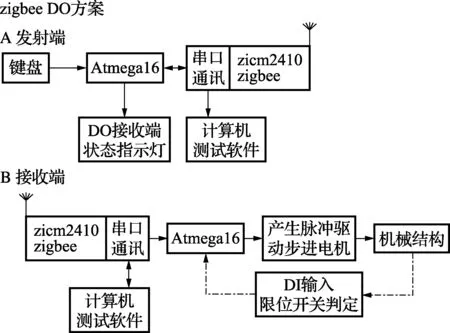
图3 遥控发射接收端硬件原理图
图4给出了发射端和接收端的程序流程图,在发射端程序主要实现按键值采集、发送指令、和读取远程子站点的状态,在主函数中主要设计了以下4个子函数。
void init_devices(void)初始化各硬件设备
void tran_jianzhi()按键值的处理
void int0_isr(void)中断产生的处理
void PosQuery(void)远程子站点状态查询
在接受端程序主要实现接收指令、控制电机和读取本站点的状态,在主函数中主要设计了以下4个子函数。
void init_devices(void)初始化各硬件设备
void tran_rcvdata(void)解析指令的处理
void Timer0_cmp_isr(void)驱动电机的处理
void PosCheck(void)位置检测的处理
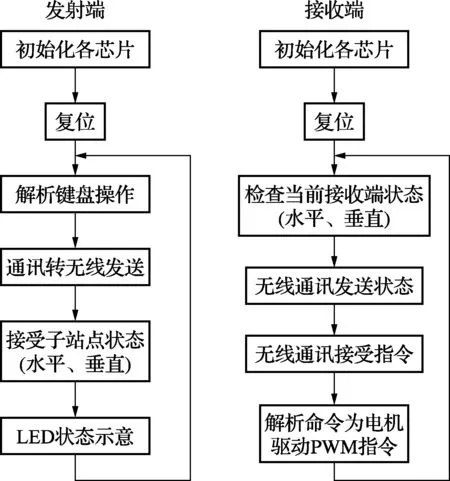
图4 收发端程序流程图
2 遥控指挥系统的实验结果
在我院原阳二基地基线场,按图5放置全站仪和反射棱镜遥控装置,分别调整各自整平螺旋,确保中心点和桩基中心重合,在观察点桩4位置遥控操作反射棱镜2、3等动作,测量了3段距离(图中只给出了两段测量距离D1、D2),每段测量5次,每次测量完成后反射棱镜均回到水平位置再重新测量,数据如表1所示。
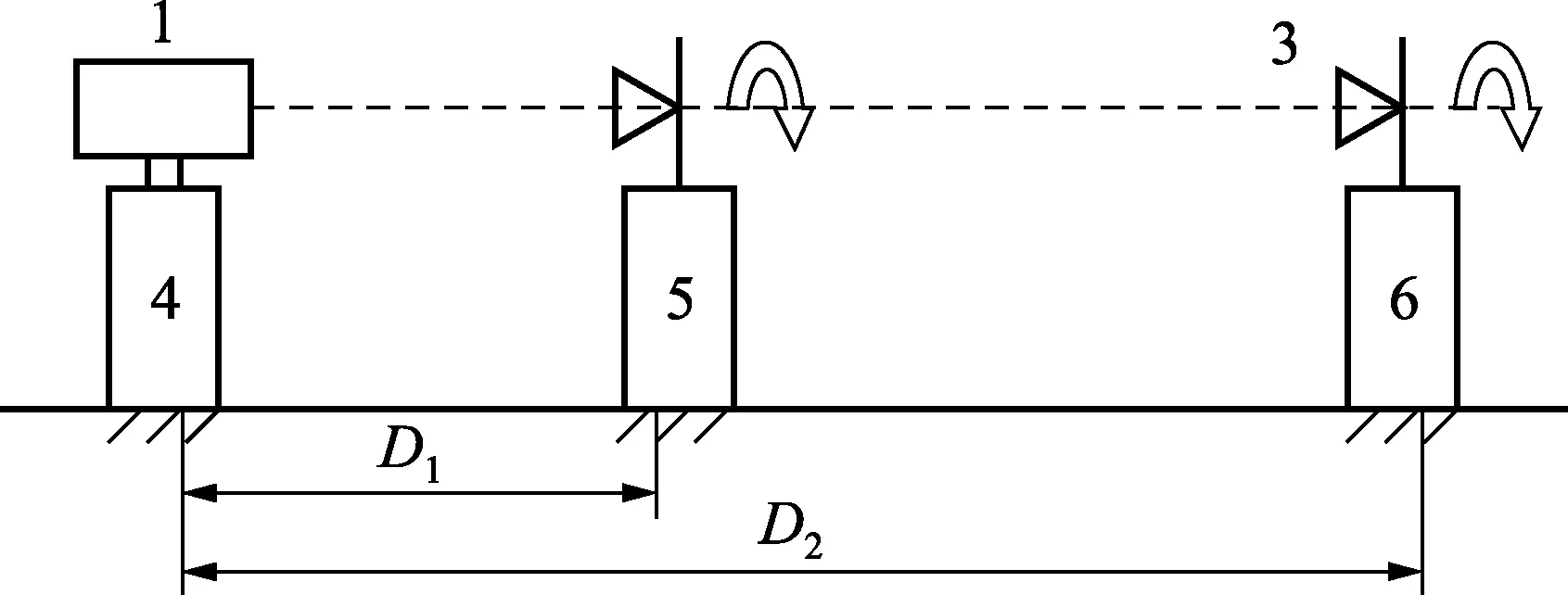
1.全站仪;2、3反射棱镜遥控装置;4、5、6基线桩
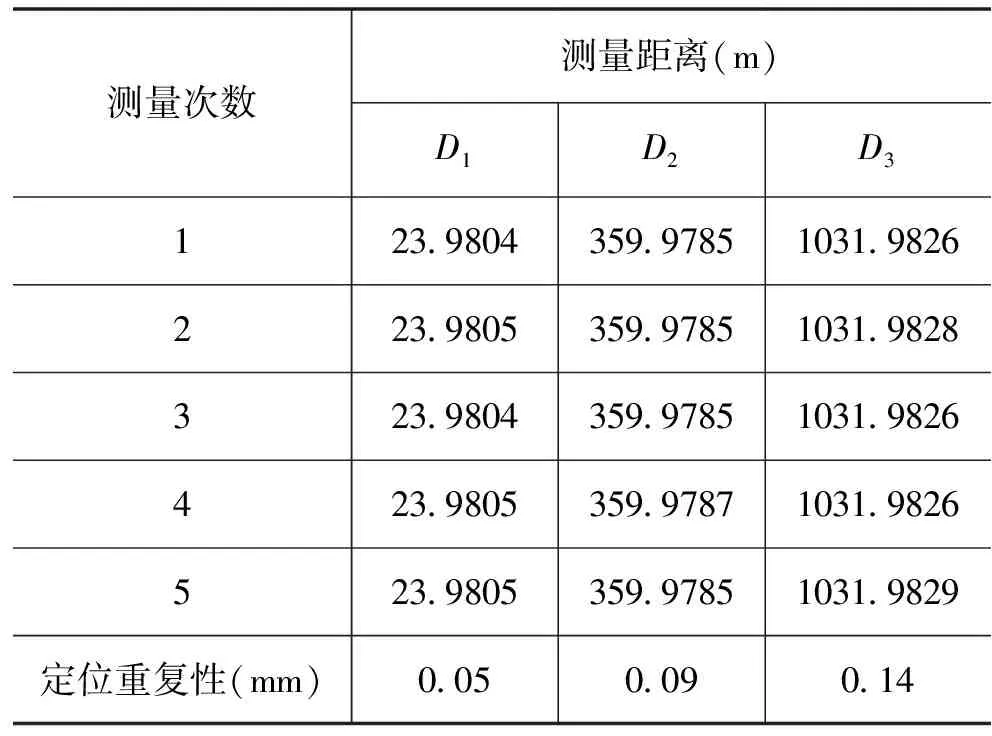
表1 遥控装置测量基线场数据
从数据表1可以看出,不管是在近点(24m附近)还是在远点(1km附近),重复定位误差均小于0.2mm,遥控距离和定位重复性两项指标完全满足设计和实际使用要求。
3 结论
全站仪测距部分的野外检定工作采用传统人工摘取棱镜的办法费时费力,研制了一套反射棱镜遥控指挥装置,该装置能够在1km范围内对反射棱镜的位置做出遥控控制,遥控距离适当,定位重复精性高,省去了检定过程中人员来回移动棱镜的繁琐劳动,提高了检定效率。
[1]国家质量监督监督检验检疫总局.光电测距仪检定规程(JJG 703—2003).北京:中国计量出版社,2004
[2]陈士达,徐秉华,陈益茂,高明.全站仪加乘常数的校准方法[J].计量技术,2012(11)
[3]陶茂盛.全站仪测距加常数及其短基线检测法[J].计量技术,2006(9)
[4]范百兴,李佩臻,邓向瑞,等.全站仪测距常数分离检定研究[J].计量学报,2009(Z1)
[5]张莉,齐维君,方爱平,等.大长度实验室检测平台自动化系统[J].计量学报,2008(z1)
[6]李文仲,段朝玉.Zigbee无线网络入门与实战[M].北京:北京航空航天大学出版社,2007
