基于GMR传感器的姿态检测系统设计
2014-03-22林亚坤钱正洪
林亚坤,钱正洪,白 茹,冀 亮
(杭州电子科技大学磁电子中心,浙江杭州 310018)
0 引言
载体姿态的准确测量在航天、机器人、导航、人体运动分析以及机器交互等方面有着至关重要的作用[1-2]。姿态检测系统能够实时准确提供载体的航向角、俯仰角和横滚角等姿态信息,在航空航天技术领域,是飞行器中姿态稳定平台的重要组成部分;在机器人技术领域或医疗设备领域,可作为动作识别的关键组成部分;在智能手机等终端设备,是设备空间姿态判断识别、防抖动技术、智能应用的重要硬件支撑[3]。
目前,MEMS传感器在消费类电子产品中得到广泛应用。GMR传感器作为新型磁阻传感器,与AMR传感器相比,具有体积小、灵敏度高、线性度好,磁场分辨率高、接口电路简单等优点,更适合在姿态检测系统中应用[4]。
文中设计了基于三轴GMR传感器、三轴陀螺仪和三轴加速度计的姿态检测系统,该系统利用陀螺仪测量载体的角速度信息解算姿态,通过GMR传感器和加速度计测量地磁场方向和重力场方向来修正陀螺仪的漂移误差,能够有效解决传统电子罗盘在运动过程中姿态测量误差较大的问题。
1 系统整体设计
姿态检测系统整体设计结构如图1所示,主要包括传感器及信号调理电路部分和微控制器及外围电路部分。系统采集三轴GMR传感器、三轴陀螺仪和三轴加速度计的输出信号,在微控制器内进行数据融合和姿态解算,通过RS232接口电路将载体的航向角、俯仰角和横滚角信息输入电脑,通过3D姿态显示上位机软件,直观显示当前载体的姿态信息。
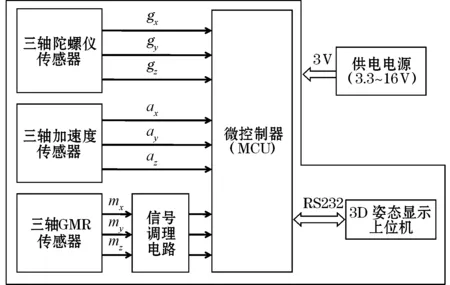
图1 姿态检测系统整体设计框图
2 基本原理
2.1四元素和欧拉角的关系
姿态是表征载体坐标系相对地理坐标系的角位置信息,欧拉角法和四元素法是两种常用的描述载体姿态转动变化关系的方法。地理坐标系的矢量u到载体坐标系的矢量v之间的转动变化关系可以表示为v=Tu[5],其中T为方向余弦矩阵。

(1)
式中:Ψ、θ、γ分别为航向角、俯仰角和横滚角。
两坐标系之间的转动变换关系也可以用四元素表示如下:
(2)
由式(1)和式(2)可得,欧拉角与转动四元素的相互关系:
(3)
θ=arcsin(2(q1q3-q0q2))
(4)
(5)
2.2电子罗盘姿态确定方法
当载体在地理坐标系下处于水平静止时,加速度计各轴测量输出为A=[00g]。当载体处于任意姿态静止时,假设加速度计测量值为B=[axayaz],则由B=TA可得:
θ=arcsinax
(6)
(7)
在计算得到θ和γ的情况下,可由GMR的三轴输出计算磁航向角[6]:

(8)
3 数据融合算法
3.1误差函数的推导
在文中介绍的滤波算法中,假设加速度计只测重力场矢量,GMR传感器只测地磁场矢量。为了方便推导,文中将三轴传感器测量到的三维矢量扩展成四维矢量[7-9]。一般的,将地理坐标系下的场矢量用Ed表示,该场矢量在载体坐标系下三轴传感器输出值用Ss表示,q表示转动四元素,则将误差目标函数的一般形式表示为:
f(q)=q*⊗Ed⊗q-Ss
(9)
q=[q0q1q2q3]
(10)
Ed=[0dxdydz]
(11)
Ss=[0sxsysz]
(12)
地理坐标系下地磁场矢量为b=[bx0bz],重力场矢量为g=[001]。载体坐标系下GMR传感器的输出量m=[mxmymz],加速度计的输出量a=[axayaz],根据式(9)~式(12),可得具体的误差目标函数为
(13)
(14)
误差平方和函数为
(15)
3.2姿态四元素更新算法
根据捷联惯导系统的四元素理论可知:
(16)

(17)
式(17)是姿态四元素数据融合更新方程[10]。其中▽f为误差平方和函数的梯度,Δt为两次采样的时间间隔。λk为k时刻最优收敛步长。
(18)
式中Hk是4×4的对称矩阵,是误差目标函数梯度对四元素的偏微分。
姿态融合算法框图如图2所示,算法框图中上标S和E分别表示载体坐标系和地理坐标系[7]。
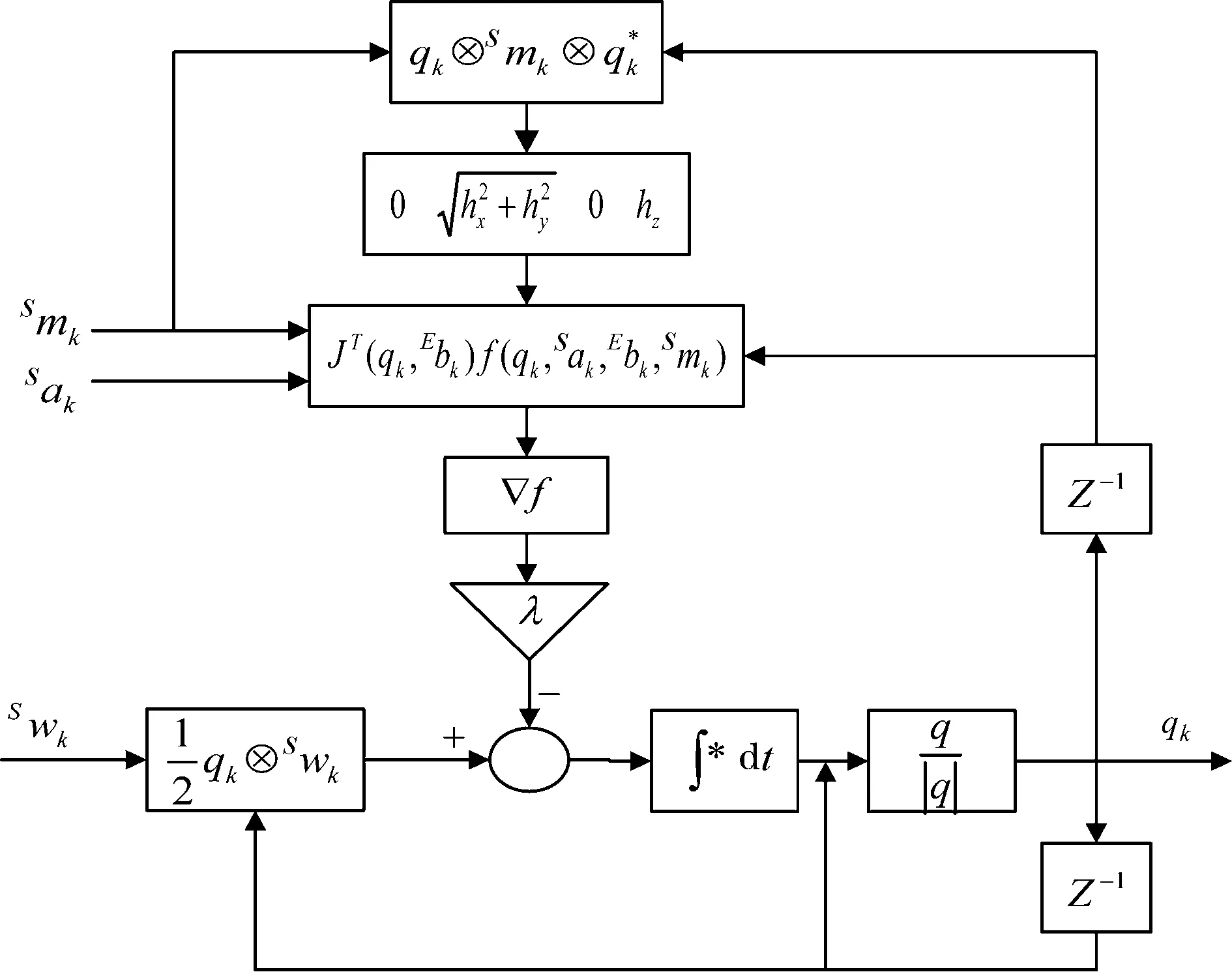
图2 姿态融合算法框图
4 测试结果及分析
图3是为了验证文中算法而设计开发的姿态检测模块,该模块主要包含三轴GMR传感器、三轴陀螺仪、三轴加速度计和stm32控制器。
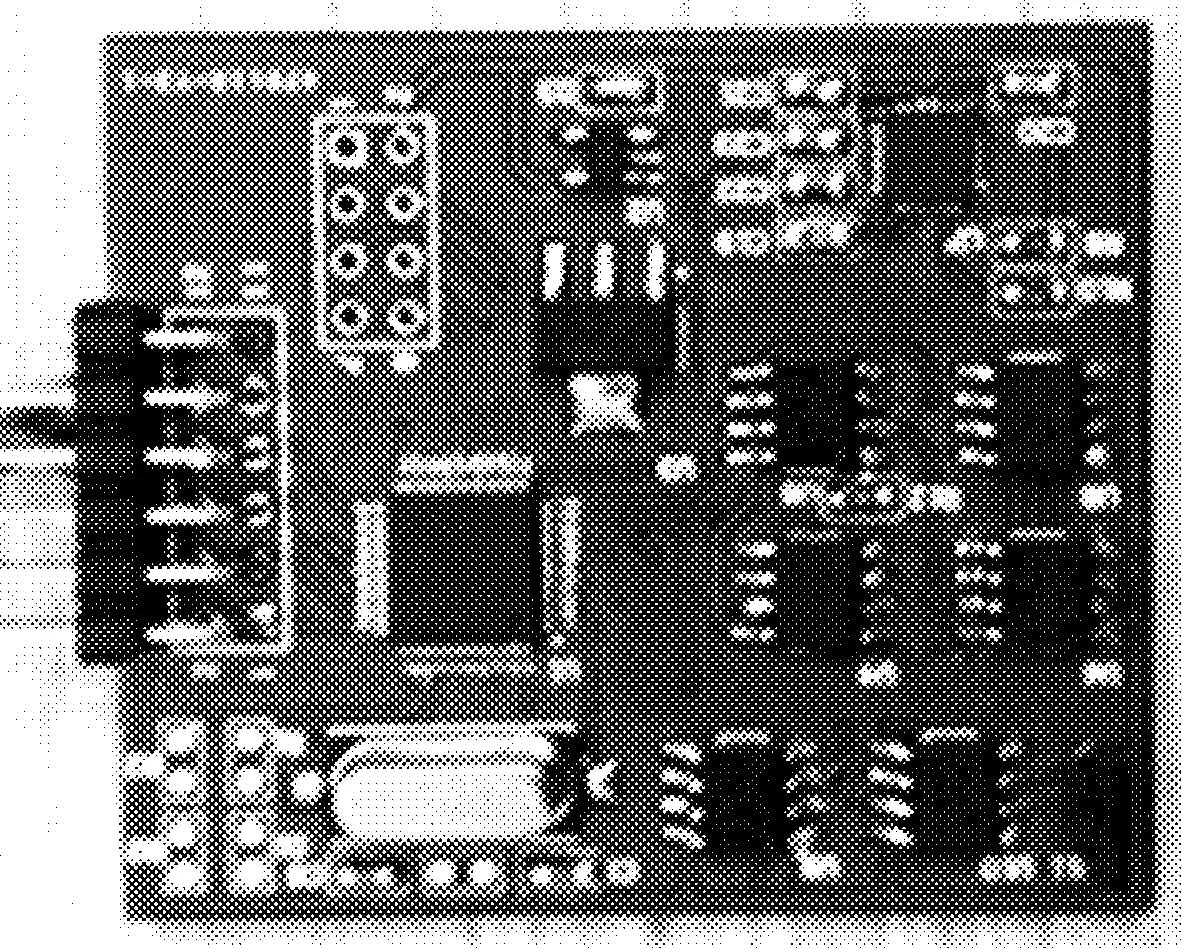
图3 姿态检测模块
图4是在静止条件下单独使用陀螺仪数据解算的姿态角信息。可以看出,随着采样点数的增加,姿态角曲线快速漂移,不具有收敛性,和陀螺仪的固有缺陷即存在漂移现象一致。
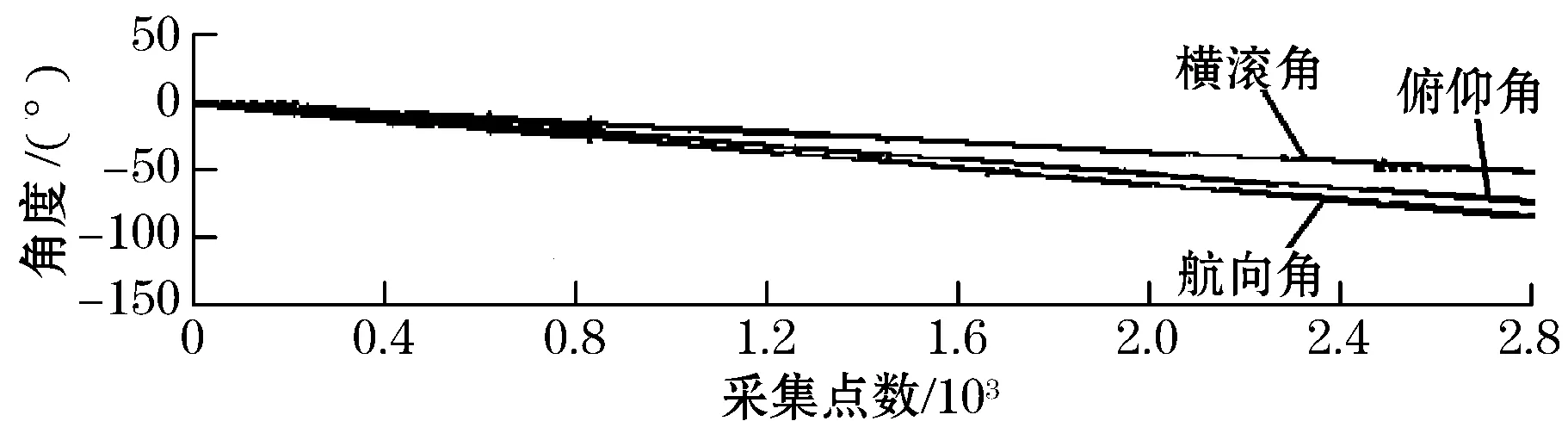
图4 静止时陀螺解算姿态角
图5采用文中提及的数据融合算法,利用三轴GMR传感器和三轴加速度计来修正陀螺仪的漂移。可以看出,在静止条件下,采集点数多,姿态角曲线依然呈直线,陀螺漂移误差得到较好的修正。

图5 静止时数据融合姿态角
航向角抖动测试方法为保持模块水平放置,使俯仰角和横滚角为0°,载体在当前位置-120°绕z轴极小范围快速来回变加速运动。
从图6可以看出,电子罗盘解算出的航向角剧烈波动,最大波动范围超过±10°,而数据融合后的航向角最大波动范围小于±1°。该系统较传统电子罗盘在航向角测量方面具有较好的抗抖动干扰的作用。

图6 航向角抖动测试
图7和图8的测试方法为先使载体水平静止,待到数据收敛稳定后,图7为绕y轴小范围快速来回变加速运动,图8为绕x轴小范围快速来回变加速运动。

图7 俯仰角抖动测试

图8 横滚角抖动测试
测试结果表明,融合后的姿态角振幅较小,与实际的运动测试姿态角的变化情况贴近,说明该系统对外界抖动的抗干扰能力更强,适合船舶在海上航行时指向和测量姿态时使用,也适合车辆在道路崎岖颠簸运动过程中使用。图9为姿态检测系统上位机软件。

图9 姿态检测系统上位机
5 结束语
传统电子罗盘在静止或匀速运动情况下具有较高的使用精度,但是在有外界加速度或是抖动干扰情况下,姿态测量误差较大。陀螺仪在测量姿态方面具有较好的动态性能,但单独使用无法克服漂移现象。
文中的数据融合方法在静态情况下,可以很好地修正陀螺的漂移误差,该姿态检测系统较传统电子罗盘在抗抖动干扰方面有较强的优势。
设计的姿态检测系统上位机软件,可以接受载体的姿态角信息,以3D形式直观展现载体的当前姿态。该系统可以应用于消费电子与一般工业的姿态检测与物体稳定控制的应用中。
参考文献:
[1]李荣冰,刘建业,曾庆化.基于 MEMS 技术的微型惯性导航系统的发展现状.中国惯性技术学报,2004,12(6):88-94.
[2]徐玉.微小型无人直升机飞控平台与姿态融合算法研究:[学位论文].杭州:浙江大学,2008.
[3]张谦,裴海龙,罗沛.基于MEMS器件的姿态航向参考系统设计及应用.计算机工程与设计,2007,28(3):631-634.
[4]钱正洪,白茹,黄春奎,等.先进磁电子材料和器件.仪表技术与传感器,2009(增刊1):96-101.
[5]高宗余,李德胜.多MEMS传感器姿态测量系统的研究.电光与控制,2010,17(3):68-70.
[6]林乾浩,钱正洪,龚天平,等.基于GMR传感器的三轴电子罗盘.机电工程,2013,30(1):56-59.
[7]MADGWICK S O H ,HARRISON A J L,VAIDYANATHAN R.Estimation of IMU and MARG orientation using a gradient descent algorithm.Rehabilitation.Robotics IEEE International Conference,Switzerland,2011.
[8]CASTELLANOS J F G,LESECQ S,MARCHAND N,et al.A low-cost air data attitude heading reference system for the tourism airplane applications.IEEE Sensors,2005:1388-1391.
[9]XIA L L,WANG J G,ZHANG L H,et al.Nonlinear Gaussian filter algorithm enhancements for low-cost integrated navigation system.Mechatronics and Automation,ICMA 2009,International confereme on.IEEE,2009.
[10]刘海颖,王惠南.低成本姿态测量系统研究.南京理工大学学报(自然科学版),2007(2):233-237.
