船舶升沉运动监测系统的设计与基本试验验证
2014-03-22李俣菡ZhangChunwei杜忠诚KangWonhee田勇
李俣菡,喻 言,Zhang Chunwei,杜忠诚,Kang Wonhee,田勇,4
(1.大连理工大学电子科学与技术学院,辽宁大连 116024;2.西悉尼大学基础设施工程研究院,新南威尔士悉尼 2751;3.DLD实验室,北京 100083;4大连东软信息学院电子工程系,辽宁大连 116024)
0 引言
作为一种水上运输工具,船舶具有装载量大、费用低等优点,在海洋航运中的作用越趋突出。现代船舶发展越来越趋向于大型化、专业化,出现了各种新型大型船舶,如超大型油船、集装箱船等。随着船舶尺寸的增大,船舶营运条件的复杂化,船舶的安全营运问题尤显突出,同时还会造成严重的海洋环境污染[1]。海上舰船或平台在风浪作用下存在横摇、纵摇、艏摇、横荡、纵荡和垂荡等6个自由度的不规则运动。获取船舶的实时运动状态数据并评估其安全状态,在船舶的安全行驶、海况的实时监测、海洋环境的保护等方面具有重大意义。因此,船舶运动状态监测系统的研究越来越受到人们的重视,相应的产品和研究成果也在不断推出。
国内外许多学者对船舶运动测量方法与系统进行了初步研究,包括非接触式测量、基于GPS的船舶运动测量以及惯性测量等。其中惯性测量是现代科学技术中一门尖端学科,它利用陀螺仪和加速度传感器测得物体瞬时的角度和加速度,再对加速度进行两次积分得到物体的位移。它具有抗冲击能力强、可靠性高、寿命长、成本低等优点,将成为导航系统的主流发展趋势[2]。因此,文中提出了一种基于加速度计和陀螺仪的惯性导航船舶升沉状态实时监测系统,并且通过试验测试加以验证。
1 系统架构设计
惯性导航以牛顿力学定律为基础,利用惯性测量元件(加速度计、陀螺仪)测量载体相对于惯性空间的运动参数,并经过计算后实施导航任务[3]。
船舶升沉状态实时监测系统基于嵌入式技术、先进传感器以及高精度信号处理算法开发,由信息采集、信息处理、信息传输和显示4个模块组成。其中,信息采集模块由加速度计和陀螺仪采集船舶运动数据,通过I/O端口和微处理系统进行通信;信息处理模块采用F28335 DSP系统,对采集信息分别进行处理,获得实时航向角以及升沉位移;最后将计算信息通过异步串行模块发送到上位机进行显示。
1.1加速度数据采集与处理原理
控制器通过加速度传感器获得三轴加速度值来提取船舶位移量,具体流程为:传感器获取船舶振动加速度,经过高阶FIR硬件滤波器进行滤波以获得含较少噪声的原信号,然后进行FFT变换获得加速度功率谱,再根据加速度/位移频率变化公式获得船舶振动的位移谱,对位移谱进行IFFT变换,从而获取实时的位移时域曲线,为船舶工况分析和评估提供参考。如图1所示。

图1 船舶位移量提取流程图
1.2陀螺仪数据采集与处理原理
船体俯仰角和横滚角参数由陀螺仪获得,陀螺仪感知船体俯仰角及横滚角的变化输出数字信号,经过FIR滤波器滤除干扰信号后,通过卡尔曼滤波估计最优姿态值,通过算法进行融合后,对所得角度数据进行量化,从而获取实时的转角数据曲线,如图2所示。
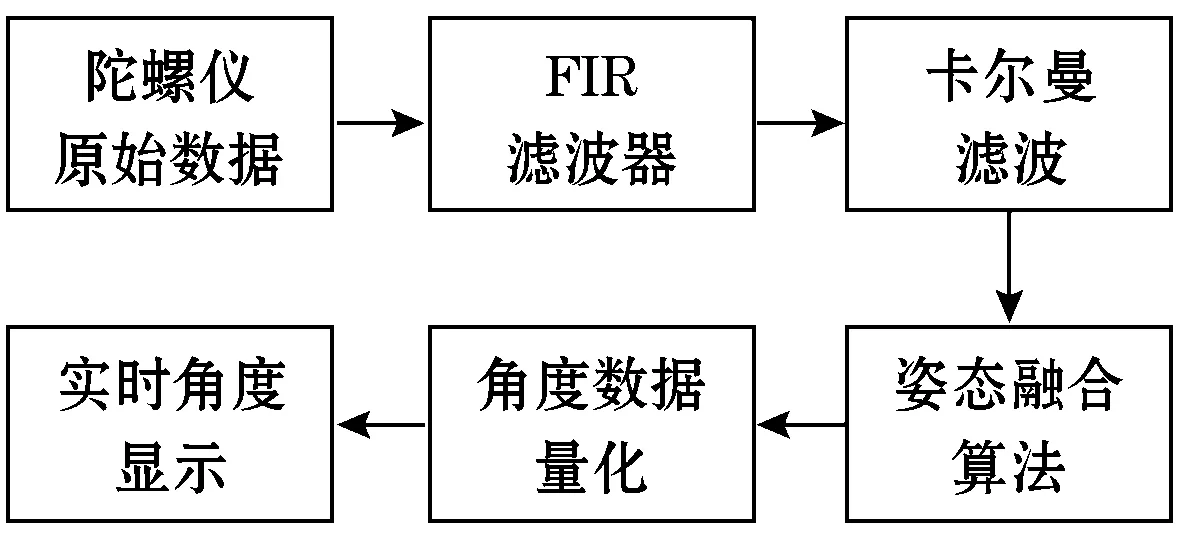
图2 船体转角提取流程图
2 硬件设计
硬件设计如图3所示,通过传感器采集到的船舶实时运动数据发送给微处理系统,微处理系统通过嵌入算法对数据进行处理,获取船舶姿态参数,以异步串行方式将数据结果发送到上位机进行显示。

图3 系统硬件框图
监测系统产品内部结构如图4所示,包括加速度传感器、陀螺仪传感器、内部温度校正传感器等,数据流经过嵌入式处理器完成滤波、设置、校正、运算等处理以及附属通信功能,共同完成基础传感器数据的获得和二次处理信息,包括相对升沉和俯仰角、横滚角等数据的获得。

图4 监测系统内部结构
2.1陀螺仪
该SMU单元中陀螺仪采用±250/±500/±2000(°)/s自动变换的16位精度MEMS陀螺仪,其原始精度中随机游走度优于一般工业陀螺仪,具备良好的抗冲击性能和长期稳定性,对于准确的动态俯仰角和横滚角运算提供可靠的基础数据,同时也为上位机更高层次的应用开发提供稳定数据。
2.2加速度计
加速度传感器采用了定制的三轴向低频专用传感器,其指标优于目前主流的欧美制式MEMS传感器,在±2g量程内的有效分辨率及噪声指标均高于60 μg水平,并提供±2g、±4g、±8g多量程可选。由于加速度传感器指标直接影响系统相对升沉的运算指标,故系统程序内部自动变换量程确保测量的最佳精度范围。
2.3系统实物
监测系统的外形尺寸和内部结构由图5所示。
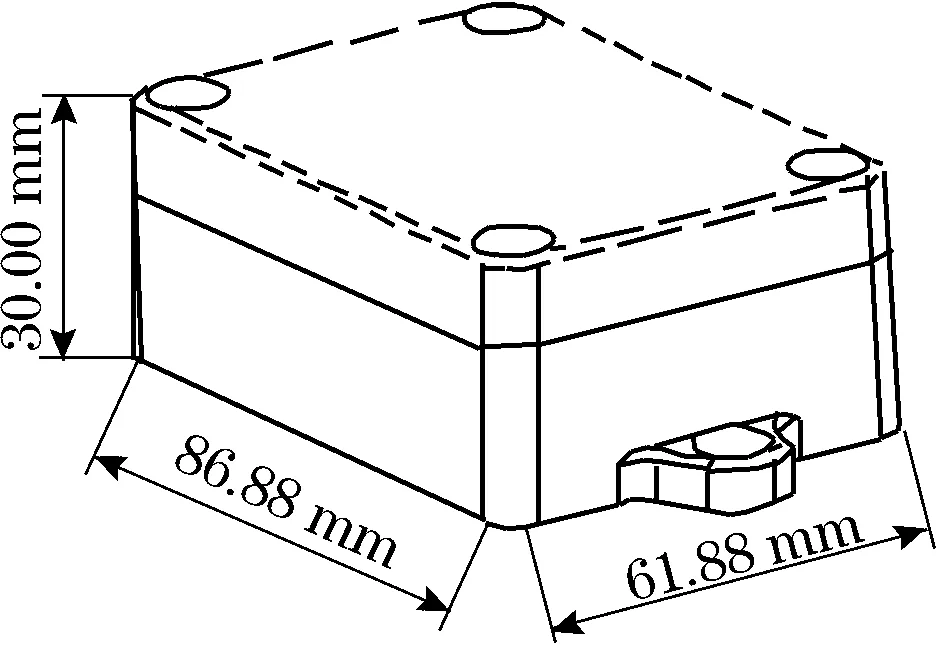
(a)监测系统的外形尺寸
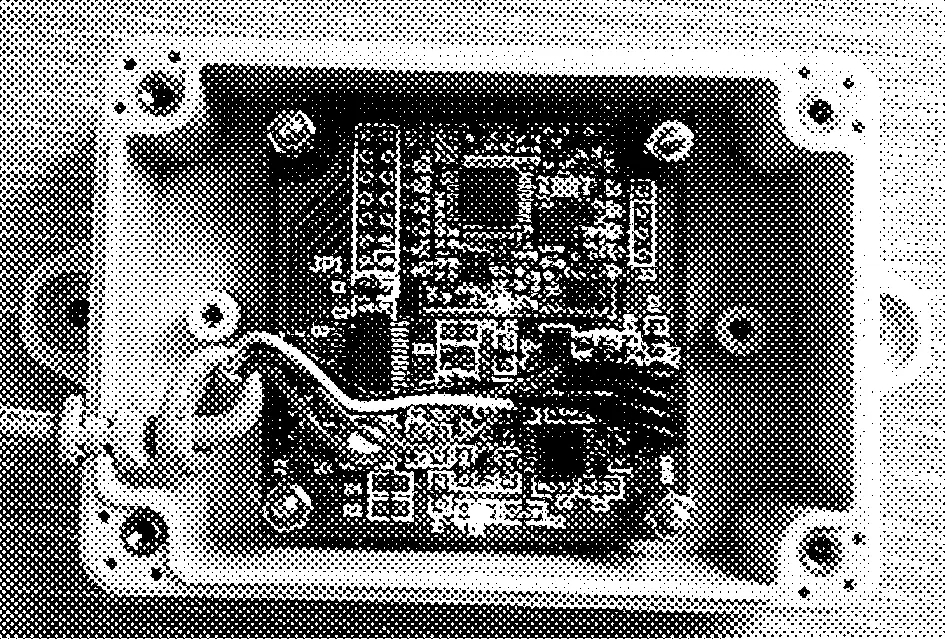
(b)系统内部结构
监测系统封装在一个长、宽、高为86.88 mm、61.88 mm和30.00 mm的长方形盒子中,盒子上下两端均有悬挂孔,较小的尺寸便于携带及安装。
3 软件设计
软件上位机程序主要实现对现役船舶升沉位移、船舶俯仰角度、船舶振动加速度等信号采集、特征量提取、实时显示和报警、工况录入等功能。
考虑到监测人员方便使用以及安全性等因素,系统为图形化界面,包括3个主要模块:实时数据采集显示,数据分析和用户管理。其中数据分析又细分为3个子模块,包括历史波形回放、频谱分析和数据导出。用户管理包括添加用户、查询和删除用户3个子功能模块。用户登录后只需进行简单的设置就可以进行监测。
而图形化的输出界面也便于监测人员的观察和分析,如图6所示。通过历史波形回放模块可以在采集结束后,对采集到的数据进行波形重放,为用户对船舶运动分析提供了方便。利用频谱分析模块可以对采集数据进行频谱分析,在分析过程中,用户可根据实际需求设置频谱分析参数,以满足分析需求。利用数据导出模块可以将系统存储的二进制原始数据导出,为用户对数据的后期处理提供了方便。通过用户管理模块可以对使用该系统的用户进行添加、删除和查询操作。且在添加用户时,可对用户权限进行设置,保证了系统的使用安全。
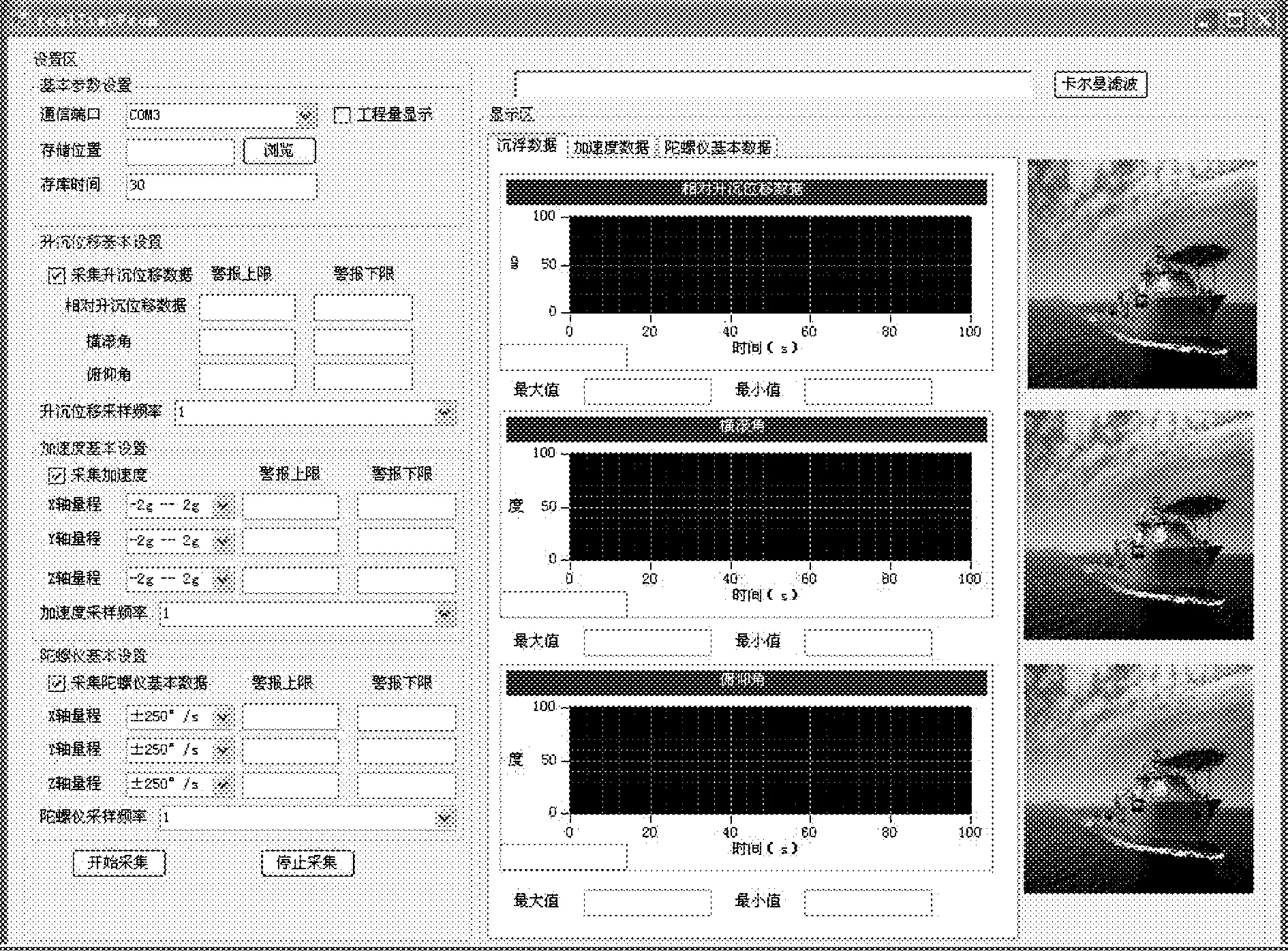
图6 图形化设置及显示界面
4 标定方法分析与实验分析
4.1传感器芯片标定方法
系统中所采用的传感器芯片除了电气长期稳定性的参数要求、适应环境条件外,还要在产品成型后分类对不同元件进行例行标定。
4.1.1加速度传感器的标定
加速度传感器的标定采用静力重心加速度法标定其量程准确性,并附和局部频率点进行动态数据传感器频响的标定。目前常见的动态数据标定方法是加速度对比法。文中采用标准的GT21定制力平衡式加速度传感器和kistler 808A标准石英加速度传感器对加速度芯片进行标定。
4.1.2陀螺仪的标定
陀螺仪系统由于生产结构标定工艺复杂,依据通行惯例一般依据原厂给定标定数据精度和二次运算所得参考角度精度确定其稳定性精度。
4.1.3位移标定
相对升沉的标定采用步进闭环纵向大位移驱动架标定,对于小位移,采用步进立式丝杠标定。
4.2系统测试
在实验室的实验平台上对该系统关于相对升沉位移数据、加速度数据及横滚角和俯仰角的数据采集进行了一系列的对比测试。结果表明:虽然在静止台面上,由于噪声及其他干扰因素的存在,系统的输出有微小的振荡,但在5 cm、20 cm、100 cm位移测试中均能以较高精度准确输出位移测试结果。随着位移量的增大,输出结果越加平滑。系统能满足一般对位移的精度及实时性等的要求,如图7~图9所示。

图7 静止时输出
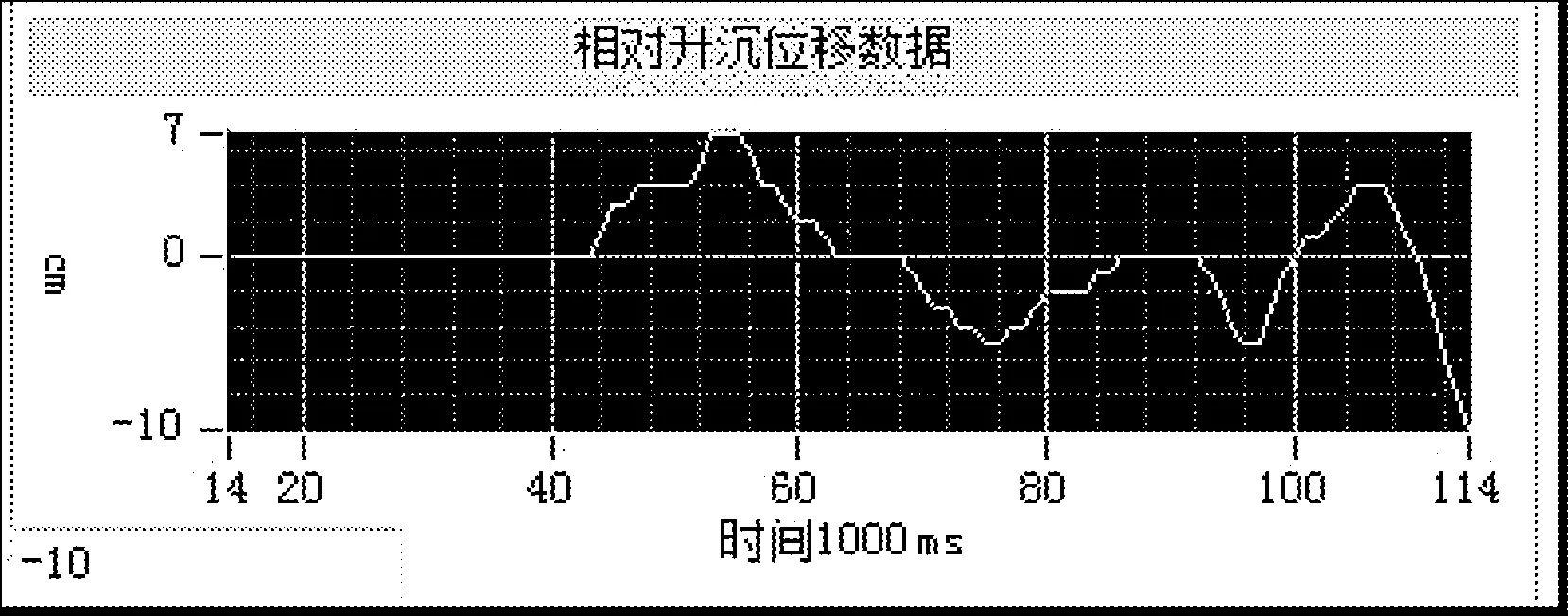
图8 20 s周期,5 cm位移
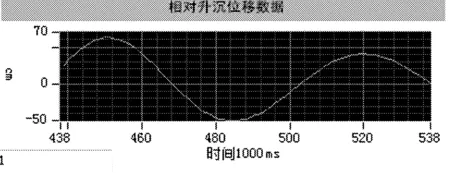
图9 20 s周期,100 cm位移
而加速度计的输出也表明:当系统处于静止时,加速度计输出由于噪声的影响在零刻度线附近有较小幅度的振荡,但抗噪能力能够满足要求。当系统移动时,加速度计有实时准确的输出。并且俯仰角和横滚角的输出均满足要求。
SMU传感器具体性能参数如表1所示。

表1 系统性能参数
5 结论
基于MEMS加速度计和陀螺仪的姿态检测系统,具有结构简单、成本低、适用范围广的特点。由于采用了加速度计和陀螺仪的数据融合,加速度计误差对测量精度的影响被有效抑制。同时,系统的姿态算法简化了传统姿态检测算法中大量的矩阵运算,并保留了其算法精度,可以有效地移植到低端微控制器中,在保证姿态测量系统运算速度的同时进一步降低了系统成本。
实验结果表明:系统具有较好的抗干扰性、实时性及准确性,而图形化的控制显示界面为用户操作提供了方便,具有很好的应用前景。
参考文献:
[1]贾连徽.船舶运动与应力实时监测系统的研究与开发:[学位论文].哈尔滨:哈尔滨工程大学,2011.
[2]赵翔,杜普选,李虎,等.基于 MEMS 加速度计和陀螺仪的姿态检测系统.铁路计算机应用,2012,21(3):15-18.
[3]魏萍.基于 ARM 的嵌入式航向姿态参考系统的研究:[学位论文].杭州:浙江大学,2006.
[4]陈爱国,叶家玮,陈远明.基于加速度计阵列的舰船波浪运动检测.深圳大学学报(理工版),2010 (3):374-378.
[5]黄橙,方淡玉,李坚,等.基于姿态监测的船舶航行安全监控系统研究.广州航海高等专科学校学报,2012,20(2):4-6.
[6]赵琳,刘付强,王文晶,等.基于 MEMS 惯性器件的微型船用组合测姿系统设计.系统仿真学报,2009 (14):4433-4436.
[7]冯智勇,曾瀚,张力,等.基于陀螺仪及加速度计信号融合的姿态角度测量①.西南师范大学学报 (自然科学版),2011,36(4):137-141.
[8]蒋窍,李杰,刘俊,等.基于单片机的 GPS/MEMS 陀螺仪航向角实时测量系统.传感技术学报,2011,24(6):919-922.
