联机检修结构可靠性模型在雷达设计中的应用
2014-03-20杜广涛
杜广涛
(中国电子科技集团公司第三十八研究所,安徽 合肥 230000)
0 引言
航管雷达在空中交通管制系统中占有重要的地位,它对航行、起飞、着落的安全性承担重大的使命[1],同时,雷达要全天24小时不间断地工作,对雷达任务可靠性 (MTBCF)提出了非常高的要求,在雷达设计时除了要采用简化设计、降额设计、热设计和人机工程设计等常规的可靠性设计方法外,还可以采用电磁兼容设计、故障弱化设计等方法,但为了保证雷达的高可靠性,冗余设计是必不可少的可靠性设计方法。由于航管雷达要不间断地工作,当设备出现故障时必须保证能在线维修,故停机检修的可靠性设计模型将不能满足要求,而必须采用联机检修可靠性设计方法。
联机检修是指系统在工作过程中,对发生失效的冗余单元进行即时的检修[2]。冗余结构模型是提高系统可靠度的重要手段,但是,如果没有维修性手段,冗余单元的潜力将不能充分地发挥。对于联机检修的设备,系统的可靠度会大幅度地提高。
1 联机检修结构的可靠性模型
1.1 联机检修与停机检修理论模型
对于由两个相同单元组成的联机检修并联系统,其联机检修的两重并联的状态转移图如图1所示[2-3]。
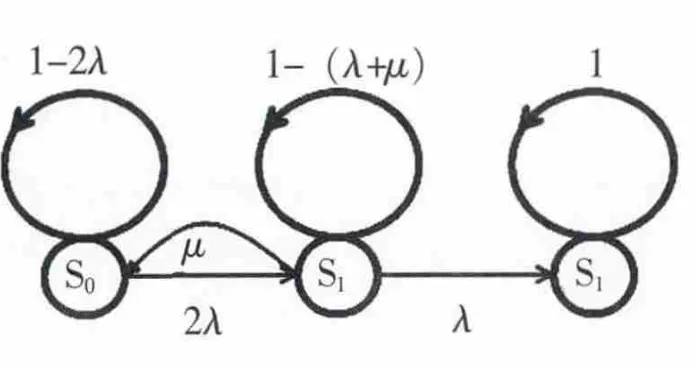
图1 联机检修两重并联系统的状态转移图
图1中,S0表示两个单元均正常工作; S1表示1个单元处于正常工作状态,另一个单元发生失效而处于检修状态;S2表示两个单元均失效。由状态说明可知,系统可靠度Rs如公式 (1)所示[3]。

λ——单个单元的失效率;
μ=1/MTTR为修复率;
MTTR为单元平均修复时间。
系统的平均致命故障间隔时间如公式 (2)所示[2]。

对于联机检修 (n-1/n)表决可修模型,允许1个单元发生故障,并在继续工作进程中可以对失效单元进行检修,故障修复后继续一起工作,直到任务结束后停机。系统的平均致命故障间隔时间如公式 (3) 所示[3]。

以上是对联机检修的结构模型进行的相应论述。而对于停机检修的并联结构模型,其系统可靠度和致命故障间隔时间如公式 (4)、 (5)所示。

1.2 联机检修与停机检修模型比较
例如,某并联冗余系统,单个单元失效率为0.02,修复率为0.5,任务持续工作时间为8 h,其停机检修的可靠度和 MTBCF由公式 (4)、 (5)可知: Rs(t) =2R0-=2exp (-0.02*8) -exp(-2*0.02*8) =0.978。 MTBCF=1.5/λ=75 h; 联机检修的任务可靠度和MTBCF由公式 (1)、 (2)计算出结果为 0.991 和 MTBCF=3λ+μ/2λ2=700 h, 通过比较可知,联机检修模型将会使系统的可靠度大幅度地提高。
2 联机检修模型的应用实例
某军航雷达(以下简称X雷达)主要用于航路监视,兼顾警戒引导,提供目标的距离、方位、速度和航向等信息,以及航路上浓积云和积雨云的轮廓信息,为空中交通管制和日常防空提供情报保障。主要探测对象包括:民用航空器如民航客机、通航飞机、运输机等,军用作战飞机如战斗机、攻击机、轰炸机和直升机等。X雷达可靠性指标要求如下:
a)平均故障间隔时间 (MTBF):大于1000 h;
b)平均致命故障间隔时间 (MTBCF):大于30000 h;
c)致命故障判据:造成雷达不能完成规定任务或探测威力下降5%的故障。
X雷达的MTBCF要求大于30000 h,远大于我所以前研制的航管雷达XX-XX要求的20000 h的目标[4-5]。为了实现高MTBCF,设计之初,结合工程经验对MTBF和MTBFC进行了分配, 分配结果如表1所示。
在设计过程中,天馈系统由于主要是结构件,天线骨架、转台等均无法采用冗余设计,只是采用了简化设计、降额设计等措施。发射分系统的任务可靠性模型如图2所示,前级组件和末级电源、监控及电源采用联机检修并联结构模型;发射系统发射组件和电源采用故障弱化功能,允许一个发射组件损坏而不影响雷达的任务,并可以迅速地在线更换[4],其可靠性模型为 (m,n)并联表决结构,m表示冗余单元数,n表示系统正常工作时所必须工作冗余单元数,由公式 (3)计算可知发射模块的MTBCF很高,对整机的影响很小。由于发射风机和合成器是独立单元,故发射系统的MTBCF不会很高。从以上分析可知,天馈系统和发射系统是雷达可靠性设计的瓶颈。
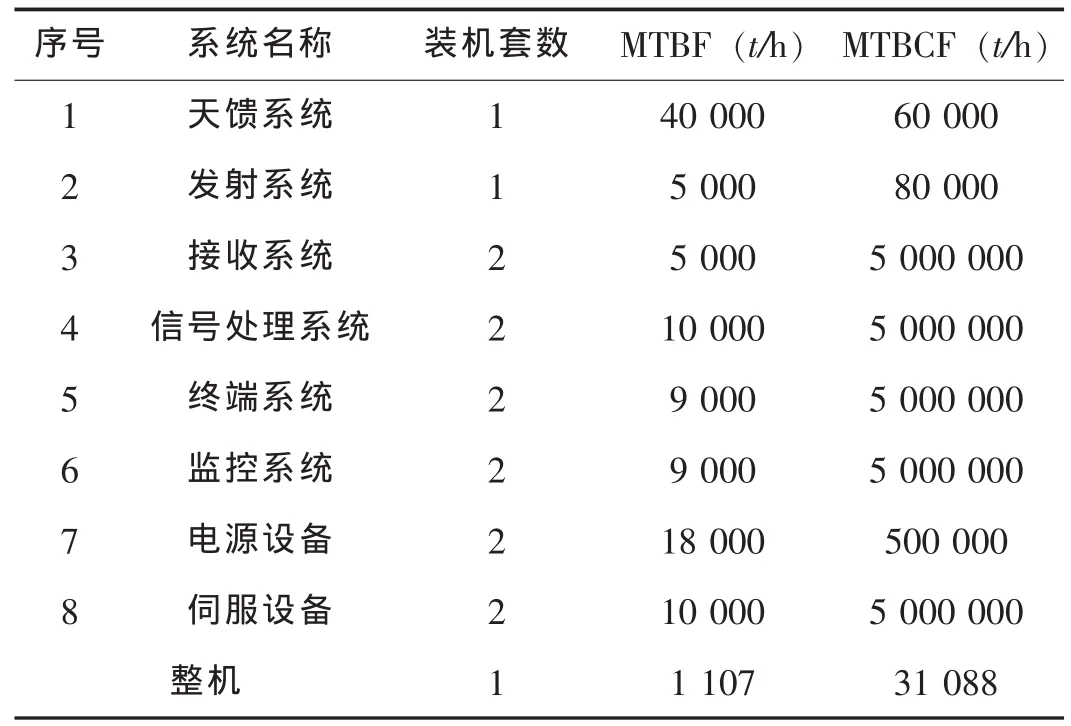
表1 X雷达可靠性分配表
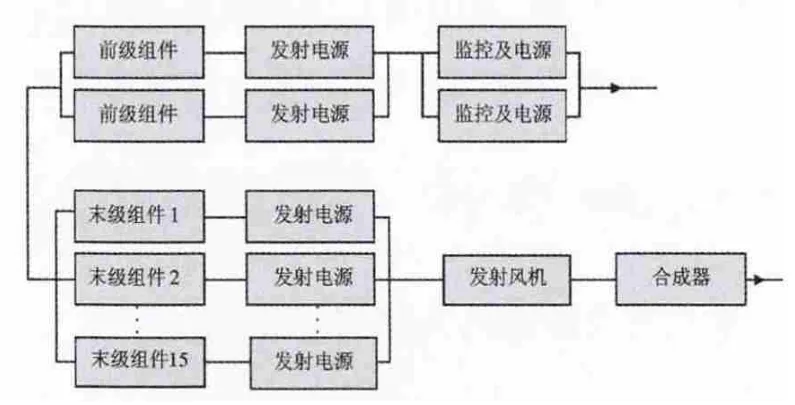
图2 X雷达发射系统任务可靠性框图
考虑成本原因,除天馈和发射系统外,X雷达其他分系统均采用了联机检修并联结构可靠性模型进行设计。以终端系统为例,系统采用双套冗余设计,终端功能相同,任一套工作正常,雷达均可正常工作。单套系统的可靠性参数如表2所示,系统总失效率为 53×10-6/h, MTTR=0.12 h。
终端系统任务可靠性框图如图3所示,由于单套设备的总失效率为 53×10-6/h,MTTR=0.12 h,故在线检修并联双套系统的MTBCF由公式 (2) 计算结果为1.4×109h,系统的等效失效率近似为0。除天馈和发射外,其它分系统的MTBCF通过计算其等效失效率均近似为0。通过计算及分析可见,联机检修的MTBCF关键取决于μ/λ,而停机维修只与λ有关,因此X雷达的任务可靠性需靠维修性保证[5]。
X雷达各分系统的可靠性预计结果如表3所示。
由上述预计结果可以看出,可靠性设计方案中MTBF、MTBCF预计结果符合规定的指标要求。以上理论分析是假设电子设备可靠性服从指数分布且寿命为无穷大的情况下得出的,如终端系统的MTBCF为1.4×109h,但实际情况不可能连续工作这么长时间,主要是电子设备在寿命后期会快速地失效,从而理论与实际结果存在很大的偏差,但应该很容易地实现分配值5000000 h的目标[5]。
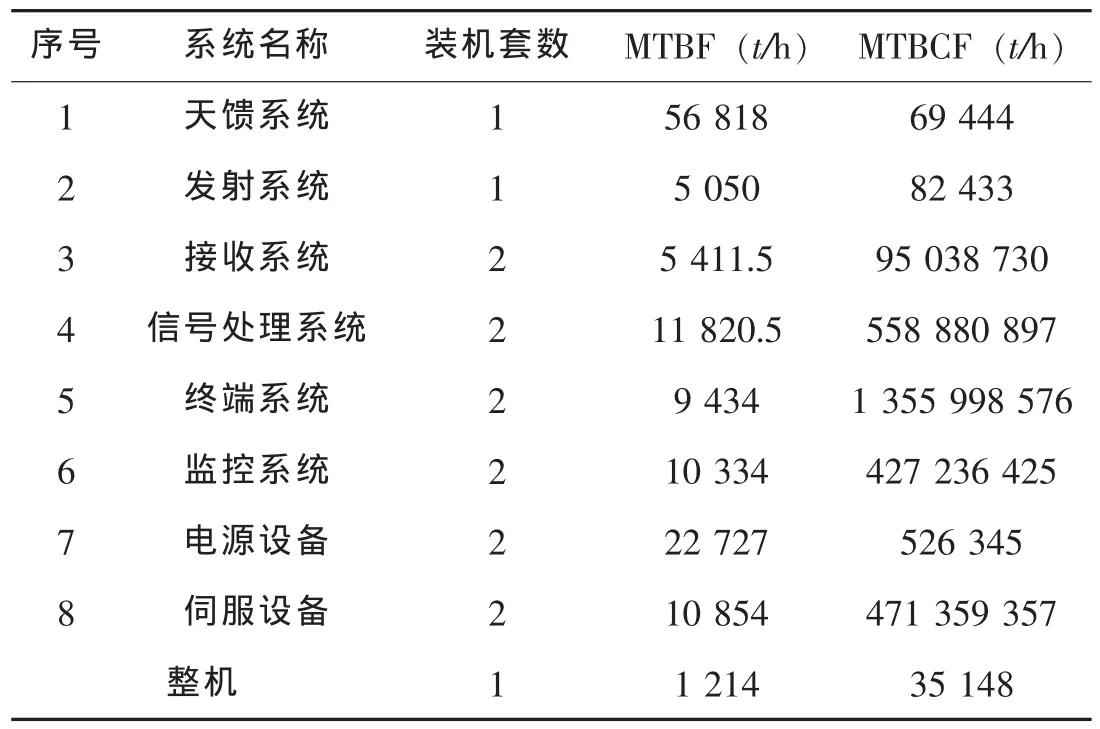
表2 终端系统的可靠性参数

图3 X雷达终端系统的任务可靠性框图
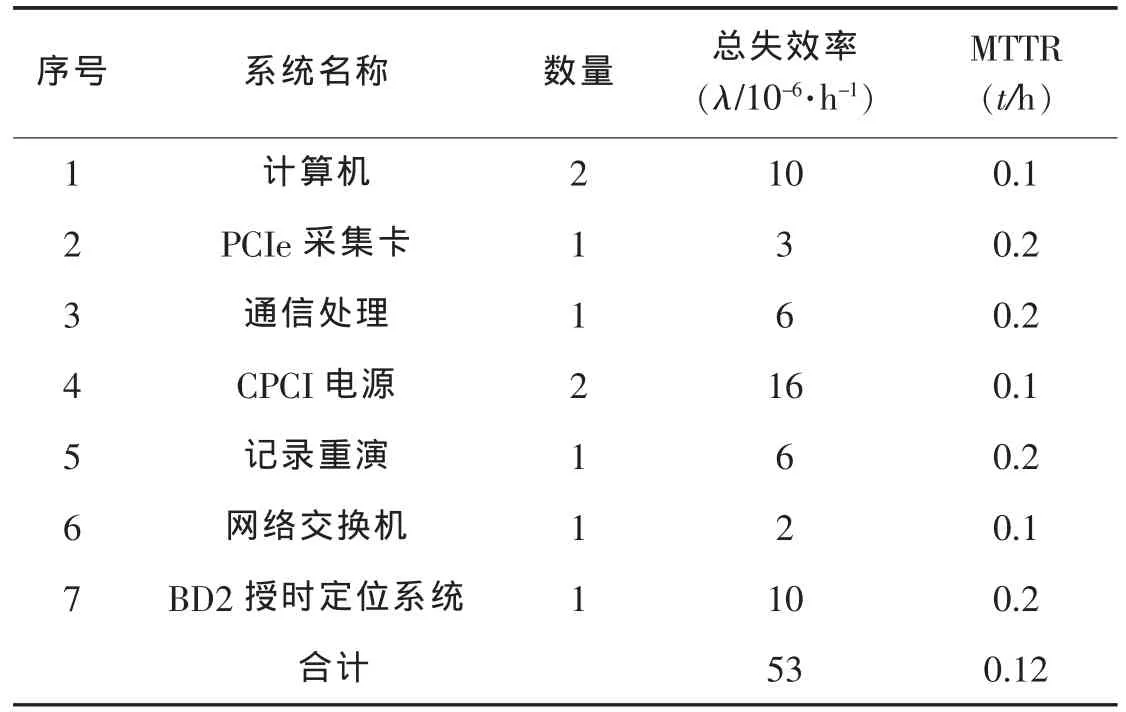
表3 X雷达的可靠性预计表
联机检修并联结构可靠性模型是实现X雷达高可靠性的唯一方法,但也为雷达设备带来不可避免的问题,如增加重量,提高复杂度,延长设计、制造、装配和试验的时间,还会增加费用[6],在实际情况下应综合各方面的因素,以达到最佳配置。
3 结束语
雷达可靠性的好坏,关系到雷达的质量,关系到企业的声誉,是雷达装备的灵魂。雷达的高可靠性只有设计才能保证。联机检修并联结构可靠性模型是提高电子设备高可靠性水平的一种有效方法,可大幅度地提高系统的可靠性。本文通过某军航雷达的设计实例,论证了该模型在航管雷达设计中的作用。由于采用联机检修模型会增加设备成本,因此在实际的设计过程中应根据产品的特点综合地考虑,没必要为一味提高可靠性而过量冗余。
[1] 孙薇薇.航管一次雷达的可靠性分析 [J].质量与可靠性, 2009 (1): 1-3.
[2] 丁定浩,陆军.装备寿命周期使用保障的理论模型和设计技术 [M].北京:电子工业出版社,2011:171.
[3] 丁定浩.可靠性与维修性工程 [M].北京:电子工业出版社,1986:116-117.
[4] 陈忠先,王景嗣.JY-21全固态航管一次监视雷达 [J].现代电子,2002,80(3):10-16.
[5] 张辉.航管一次监视雷达-JY-21[J].现代电子,2000, 72 (3): 14-19.
[6] 孙薇薇,周虹.有效的冗余设计 [J].电子产品可靠性与环境试验,2008,26(3): 47-50.
