飞航导弹编队队形变换控制器设计
2014-03-19吴森堂
杜 阳 吴森堂
(北京航空航天大学 自动化科学与电气工程学院,北京 100191)
飞航导弹自主编队的特点之一是在编队飞行过程中根据战术、任务、地形环境要求变换不同的队形[1].比如在中/末制导交接班时编队需要接近一字横队的初始队形以利于实施协同打击,又如在编队遇到的突发威胁区通过宽度小于编队的横向跨度时,往往需要队形变换.编队队形变换的相关研究不多,概念并不十分明确,至少包括队形的保持、重构、拆分和变换,它们之间既有联系又有着细微的差别.一般而言,队形保持,是指在编队运动过程中维持编队的几何形状基本不变,或者说使编队在发生一定限度内的队形形变或组织结构异常后能够复原;队形重构,是指编队中某一节点受损或故障离队后对编队进行的几何构型和组织结构的重新调整过程,往往涉及的调整范围和节点数量较少;队形拆分,是指根据具体需求把几何构型和组织结构上作为一个整体的大编队划分为若干个规模较小的子编队,进而分别执行各小编队具体上层任务的过程.在拆分中,小编队基本保留了其在原来大编队中的几何构型;队形变换,是指编队出于某种需要主动地从一种队形切换到另一种队形的过程,往往涉及的节点数量较多,队形变换前后差别较大.
对于飞航导弹密集编队队形变换,节点间距接近安全距离,且出于利用地面杂波和战术等的需要,不能通过拉升高度的方法防碰撞,如果编队控制器没有横侧向的防碰撞能力,那么由于节点的机动性有限,在同时向目标队形转换的过程中,将无法避免部分节点的位置散布区相交,即发生碰撞,因此本文首先设计具有防碰撞能力的编队控制器,然后以此为基础提出一种进一步降低编队碰撞概率的队形变换方法.
1 编队防碰撞局部模型预测控制器
编队飞行过程中,飞行器动态呈现出双时间尺度特性,编队控制系统可以按内环和外环分别设计:内环是传统的飞行控制系统,用于姿态角等的控制;外环进行航迹、速度的控制以保持期望的编队距离[2].因此本文采用拟合的速度与航迹偏角一阶惯性环节进行编队控制器设计,时间常数为τ.
1.1 基于长机-僚机跟随模式的运动模型
在长机-僚机跟随模式中,两节点水平面内相对运动关系如图1所示,相对运动方程为

其中,下标W,L分别对应于节点∈W和∈L;d为节点∈W到∈L的距离;x,y分别为 d在 ∈W弹道坐标系的正交分量;V为导弹的速度;φ为航迹偏角.
应用小角度和小扰动假设线性化式(1),并联立导弹飞行控制系统的一阶拟合模型有[3]
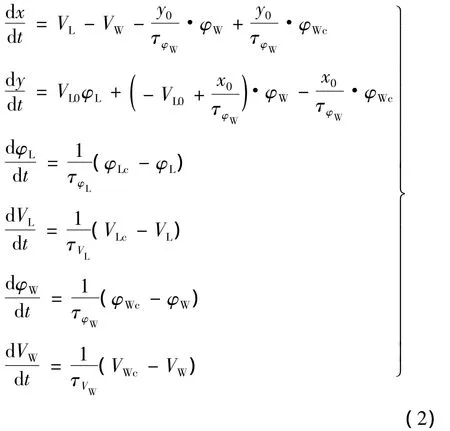
其中,含下标0的变量表示平衡点;含下标c的变量表示控制量.
常见的编队控制器多是基于式(2)设计PI控制器,整个编队队形的保持是长机-僚机跟随模式的叠加(如图2a).
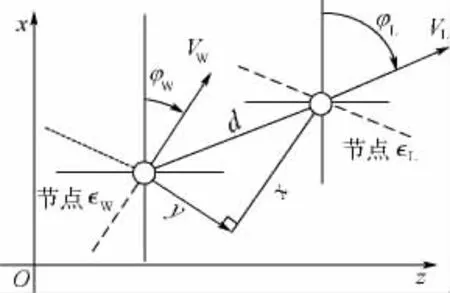
图1 两节点编队飞行的相对运动关系

图2 传统跟随模式与近邻跟随模式的区别
1.2 基于近邻跟随模式的局部运动模型
显然在没有附加设计的情况下长机-僚机跟随模式不具备弹间主动防碰撞功能.本文以编队的局部运动模型作为预测模型,利用模型预测控制[4]设计局部模型预测控制器(LMPC,Local Model Predictive Controller),令跟随节点不仅和领航节点而且和其他近邻跟随节点保持距离,并在代价函数中对领航点与近邻点加以不同的距离保持权重,从而使编队具有防碰撞能力,如图2b所示,称这种跟随模式为近邻跟随模式.
近邻跟随模式下的运动模型是对局部运动的描述,对于节点 ∈i的 LMPC,选取状态 Xi=(x1,x2,…,xj,…,xn,y1,y2,…,yj,…,yn,φi,Vi)T,其中 xj,yj为∈i与近邻节点∈j的相对距离在∈j弹道坐标系中的投影;φi为∈i的航迹偏角;Vi为节点∈i的速度;n为∈i的近邻节点数.可控输入为 ui=(φci,Vci)T,其中 φci,Vci分别为 ∈i的航迹偏角指令和速度指令.可测量干扰为 di=(φ1,φ2,…,φj,…,φn,V1,V2,…,Vj,…,Vn)T,其中 φj,Vj分别为近邻节点∈j的航迹偏角和速度,由∈i通过编队通信网络获得.输出Yi=(x1,x2,…,xj,…,xn,y1,y2,…,yj,…,yn,Δφi,ΔVi)T,其中Δφi=φL- φi,ΔVi=VL- Vi,输出Yi反映了节点∈i与所有近邻节点或领航节点的相对位置关系,与领航节点的航迹偏角与速度偏差.相对运动学关系和飞行控制系统模型同理1.1节,可得∈i近邻数为n的局部运动离散预测模型为

系统阵为


其中含下标r的变量表示线性化时的平衡点,可取为间距指令值.
1.3 局部模型预测控制器
以式(3)为预测模型,在线优化的代价函数Ji取为
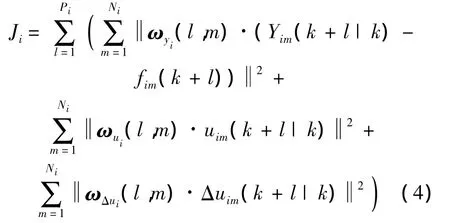
其中,Pi为预测时域;Ni为控制时域;(k+l|k)为在第k时刻计算的k+l时刻的预测值;f为间距保持指令;ωi为代价权重,分为3组:ωyi为输出惩罚权重矩阵;ωui为输入惩罚权重矩阵;ωΔui为输入导数惩罚权重矩阵[5].节点∈i通过在线求解一个有线性不等式约束条件的二次规划(QP,Quadratic Programming)问题,得到LMPC的控制量ui,作为k时刻的指令,作用于内环飞行控制系统:

其中,[φmin,φmax]和[Vmin,Vmax]分别为航迹偏角和速度指令限制;Δuiopt为最优序列的第1个控制量;ui1,ui2分别为 φci和 Vci.
2 队形的状态转移变换方法
编队队形可以用各节点相对领航点的距离矩阵F来描述,从初始队形F1到目标队形FR的变换过程中,若能找到尽可能少的一系列子队形Fi,使得从Fi-1到Fi的直接变换过程中各节点产生碰撞的概率小于特定阈值,则称…,FR}是从F1到FR的一个队形状态转移变换,从而离线形成队形数据库.当编队处于某一队形状态时,若编队指标(平均间距标准差σ)小于预设阈值则触发下一状态子变换,变换流程见图3.
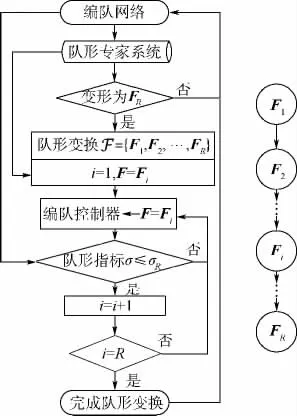
图3 队形的状态转移变换方法流程图
3 仿真及结果分析
情景设定为水平面内一正六边形编队变换为直线编队,整个过程定高飞行,主要参数见表1,初始队形和目标队形如图4,节点6为领航节点.

表1 节点参数(α≪r)

图4 编队的初始队形与目标队形
3.1 队形的直接变换方法仿真
初始队形为正六边形,在t=6 s时编队进行队形切换.图5是采用LMPC的队形直接变换方法仿真结果.
仿真结果表明,当 t=10.2 s时,节点 1,3,6由于机动性的限制未能拉开足够的距离供其余节点进入,LMPC能在节点间距小于安全距离的时候起到主动防碰撞作用.过程中节点1与其他节点相对距离最近,如图6,在10~15 s间其与节点2和5接近r/3,虽然大于位置散布区直径,没有发生碰撞,但从图5可以看出整个过程变化剧烈,隐含着不稳定因素.

图5 采用LMPC的队形直接变换方法仿真

图6 直接变换中节点1与其他节点的相对距离
3.2 队形的状态转移变换方法仿真
将队形变换分为4个状态,如图7所示.
F2保证了节点1,3,6之间有适当的空间让其余节点进入,F3,F4使距离较近的节点分别进入,比同时进入更加稳定.采用LMPC的状态转移队形变换方法仿真结果如图8所示.
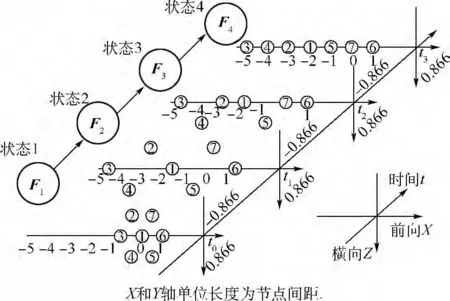
图7 正六边形编队到直线编队的队形状态转移
节点1,4,7与近邻节点的相对距离(其余节点与近邻节点的相对距离蕴含其中)如图9所示.

图8 采用LMPC的队形状态转移变换方法仿真
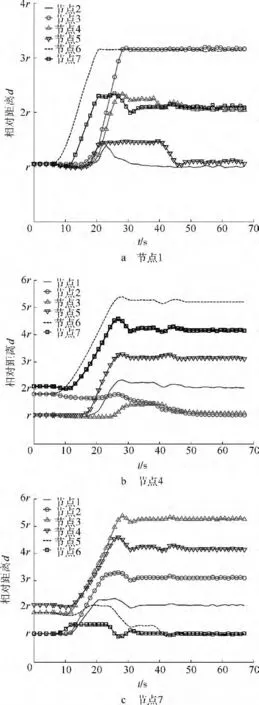
图9 状态转移变换中节点1,4,7与其他节点相对距离
仿真结果表明在整个过程中,节点间的相对距离都没有小于安全距离,整个变换过程比直接变换方法平稳许多,验证了队形的状态转移变换方法的有效性.但从中也可以发现,该方法在队形变换的耗时上多于直接方法,这也是快速性和稳定性权衡的体现.
4 结 束 语
本文针对低空飞行的飞航导弹密集编队的队形变换问题设计了基于局部预测模型的编队控制器,具有良好的防碰撞能力,并结合队形的状态转移变换方法,有效地降低了编队队形变换过程中的相互间碰撞概率.
References)
[1]穆晓敏,吴森堂.飞航导弹高动态自主编队协同控制系统的建立与仿真[J].飞行力学,2010,28(4):59 -63 Mu Xiaomin,Wu Sentang.Cooperative control system for multi-missiles high-dynamic autonomous formation[J].Flight Dynamics,2010,28(4):59 -63(in Chinese)
[2] Wan S,Campa G,Napolitano M R,et al.Design of formation control laws for research aircraft models[R].AIAA-2003-5730,2003
[3] Pachter M,D’Azzo J J,Dargan J L.Automatic formation flight control[J].AIAA Journal of Guidance,Control and Dynamics,1994,17(6):838 -857
[4] Maciejowski JM.Predictive control with constraints[M].London:Prentice Hall PTR,2002
[5]杜阳,吴森堂.飞航导弹密集编队防碰撞控制器设计[J].控制工程期刊,2013,3(3):155 -161 Du Yang,Wu Sentang.A collision free control for tight formation of multi-missiles[J].Scientific Journal of Control Engineering,2013,3(3):155 -161(in Chinese)
