海洋激光雷达在渔业资源调查和生态环境监测中的应用*
2014-03-18栾晓宁李菁文郭金家郑荣儿
栾晓宁,李菁文,郭金家*,郑荣儿
(1.中国海洋大学 信息科学与工程学院,山东 青岛266100;2.北京遥测技术研究所,北京100076)
在人类研究和认知海洋的过程中,针对海洋内部进行探测的技术手段是非常有限的[1]。尽管声学探测技术已经得到广泛应用,但由于气/水界面对声波能量能够产生接近全反射的巨大影响,给声学探测技术的应用带来一定的局限性。与传统的声学探测技术相比,光学探测技术近年来在水气界面和浅海探测中获得快速发展,特别是海洋激光雷达。作为一种主动传感器,海洋激光雷达通过发射大功率的窄脉冲激光,并通过接收设备接收激光束作用于不同探测目标物后产生的各种类型的回波信号,能够实现对海洋环境多种物理和化学参数的快速实时测量。由于海洋激光雷达具备重复频率高、探测速度快以及远距离遥测等优势,因而可以搭载在船舶、飞机甚至卫星上,具有很强的机动性能、较大的探测范围以及较低的运行成本,在搜索效率和探测点密度上都是声呐等声学探测手段无法企及的。虽然在深水探测方面声呐仍是主要手段,但在浅水探测方面海洋激光雷达已经显示出比声呐更强的竞争力,是一项极具诱惑力的新技术。
激光雷达以激光束作为探测手段,通过回波信号的振幅、相位、频率和偏振等物理参数来反演探测目标物的属性。而激光与海洋水体以及水体中的各种成分存在着复杂多样的作用过程,包括透射、反射、弹性散射、非弹性散射和光致发光等等。因此,依靠回波信号所包含的丰富的特征信息,海洋激光雷达能够针对海洋环境中各种各样的目标物实现从表面状态、空间分布、浓度到化学成分等多种参数的探测,并具备获得激光散射深度分布信息的能力,可以用来测绘不同海洋成分的深度分布剖面图,在水下目标探测识别[2,3]、海洋测深[4,5]、表面粗糙度测量[6-8]、激光诱导荧光探测[9-11]等领域均有成功的应用实例。
自1968年第一台激光海洋测深系统研制成功[12],海洋激光雷达已经走过了半个多世纪的发展历程,随着高性能激光器、高速处理器及高精度定位技术的不断发展,海洋激光雷达已经从诞生发展阶段逐渐步入了实用完善阶段,并在人类认知和利用海洋的过程中发挥着越来越大的作用,本文从海洋激光雷达的种类和探测原理出发,对海洋激光雷达发展及其在渔业资源调查和海洋生态监测中的应用进行重点阐述。
1 海洋激光雷达的种类
海洋激光雷达是激光技术应用于海洋探测领域的重要分支,具备激光雷达的固有特点和技术优势,具有较高的测量精度、精细的时间和空间分辨率以及大的探测跨度。海洋激光雷达种类繁多,可以按照激光器类型、探测原理、运载平台以及功能用途等进行分类。海洋激光雷达系统中的光源大多数选择的是气体或固体脉冲激光器,也有少数使用气体连续激光器,并因用途各异选择不同的激光波长。通常选用的激光器有XeCl准分子激光器(308 nm)、氮分子激光器(337.1 nm)、染料激光器(383 nm)、Nd:YAG固体激光器的基频(1 064 nm)、二倍频(532 nm)和三倍频(355 nm)等。此外,针对不同目标物的探测需求,还出现了基于拉曼散射的频移波长(如397 nm)的激光雷达。由于海水对电磁波产生强烈的吸收和衰减,只有在可见光蓝-绿波段存在一个狭窄的透射窗口,如图1所示。因此针对海洋水体内部进行探测的海洋激光雷达的工作波长集中在450-550 nm的范围内,由于532 nm的商业化激光器(Nd:YAG)的成熟度高,其能耗不超过1 kW,重量低于100 kg,体积不超过0.5 m3,高效、紧凑且具有良好鲁棒性,在实际海洋激光雷达系统中获得广泛应用。该激光器的脉冲宽度通常为1-10 ns,对应在海水中的距离分辨率在0.11-1.1 m之间;灯泵Nd:YAG激光器能以1-100 Hz的频率产生1-500 mJ的脉冲能量。采用二极管泵浦的Nd:YAG激光器则更多用于低脉冲能量、高重复频率的应用场合。
按照探测原理划分,有多普勒激光雷达、激光荧光雷达、差分吸收激光雷达、合成孔径激光雷达等等。激光雷达接收的信号类型非常多样,比如弹性散射信号:如瑞利散射(Rayleigh scattering)、米散射(Mie scattering)、共振散射(resonance scattering)、非弹性散射信号:如拉曼散射(Raman scattering)、布里渊散射(Brillouin scattering)和激光诱导荧光信号(Laser induced fluorescence),对应不同类型的海洋激光雷达。
因运载平台不同,海洋激光雷达又可分为水下激光雷达、船载激光雷达、机载激光雷达和星载激光雷达。此外,海洋激光雷达的用途也非常广泛,有针对海洋环境参数的海洋测温和测深雷达、针对海洋溢油监测的激光荧光雷达、针对浮游植物和有色可溶有机物(CDOM)的激光荧光水质探测雷达、针对大型浮游动物和鱼群的渔业资源监测雷达等等。
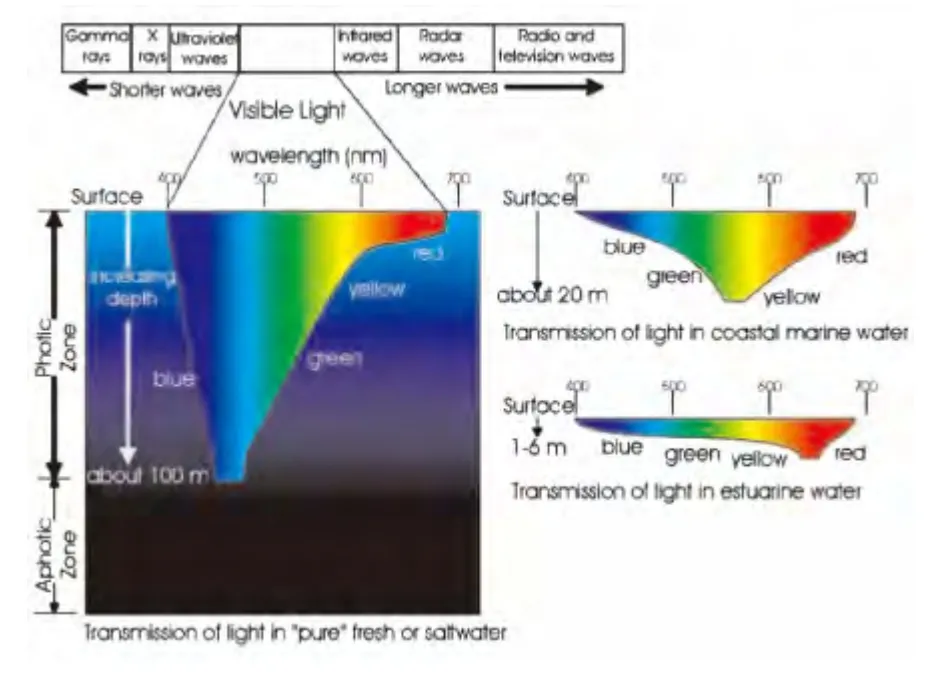
图1 可见光波段在各类自然水体中的透射距离示意图[13]Fig.1 Graphical representation of light transmission in various kinds of natural water
2 海洋激光雷达的探测原理
海洋激光雷达探测的基本原理如图2所示。从搭载平台向海面发射脉宽为纳米级的激光脉冲,一部分激光能量被海面反射,另一部分穿过气/水界面进入海洋水体内部,海面反射的回波被接收器接收,设其时间为t1;穿透海面的那部分经海水射向海底,被海底或水中其他物体反射后,再次经过海水,穿过海气界面,回波信号被接收器接收,设其时间为t2,通过测量时间差△t=t2-t1,可得到海洋水深或者水中物体的深度z:

式中c是光在真空中的速度,m是海水的折射率,在532 nm波长处m=1.341。
激光从水面直接入射到水体,第一个相互作用的过程为气/水界面的菲涅尔反射,激光束垂直入射平静海面的菲涅尔反射率约为2%,并在雷达接收机上产生一个很强的海面回波信号,海表面回波信号Ps及海底或海中物体的回波信号Pt是激光测深雷达系统接收的最重要的两个信号,它们是由测深系统参数及环境因素共同决定的。Ps及Pt可用下面的解析式近似表达:
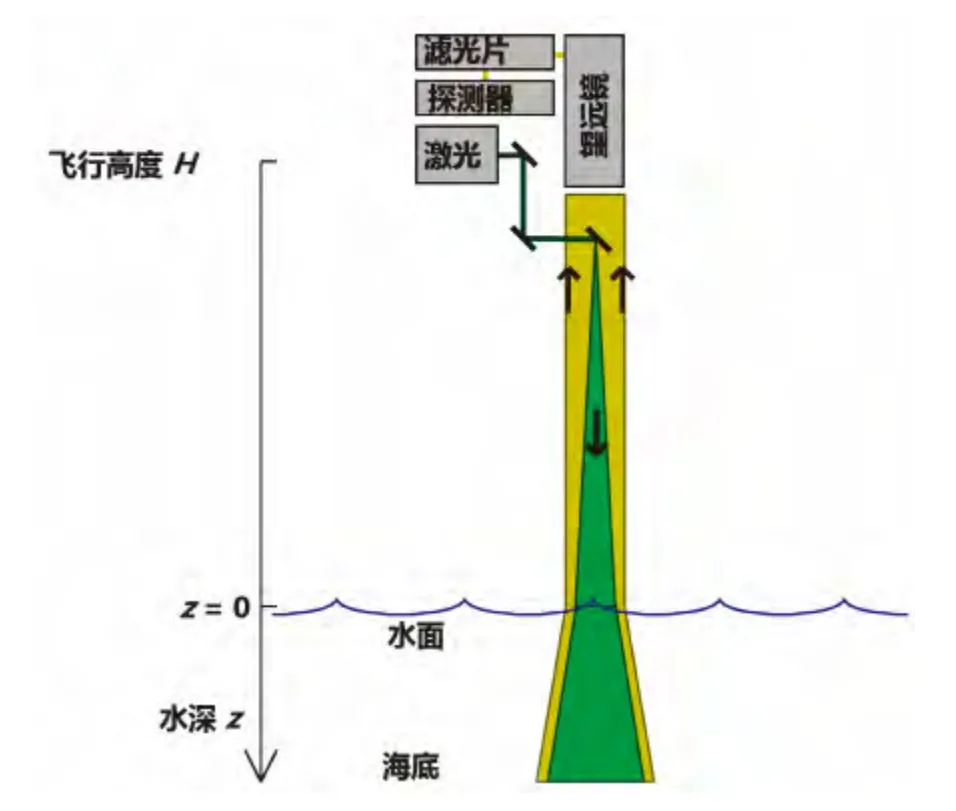
图2 海洋激光雷达探测原理图Fig.2 The schematic diagram of oceanographic lidar detecting
式中P0为激光器输出峰值功率,ρ是海面反射率,σ是空气衰减系数,H是运载平台的高度,A是接收光学系统面积,E是接收系统效率。R是海底或海中物体的反射率,Γ是有效衰减系数。从水下反射的回波信号两次通过气/水界面的能量损耗大约为4%,对于非偏振光,反射光的能量损耗不超过5%,除非入射角达到约60o。因此,激光在气/水界面处的能量损耗通常可以忽略[6,14,15]。
利用激光脉冲的弹性回波信号可以对大型浮游植物、鱼群等具有一定几何外形尺度的水下目标物进行探测,但当面对水体内部组分以及浮游生物的探测需求时,海洋激光荧光雷达依靠的是激光诱导荧光(LIF)的探测原理。
激光荧光雷达方程如下:

式中△PF为接收的激光诱导荧光能量,PL为激光脉冲能量,ρL和ρF分别为激光发射波长和荧光波长的海表反射系数,αL和αF分别为激光发射波长和荧光波长的大气衰减系数,kL和k F分别为激光发射波长和荧光波长的海水衰减系数,A为望远镜接收面积,ξF为荧光探测通道的光学接收效率,ηF为荧光物质的浓度,δλD和δλF分别为探测器的光谱滤波器带宽和激光激发的荧光带宽,δF为荧光散射截面积,H为运载平台的飞行高度,△z为待测水体的厚度,z为海水表层测量深度,m为海水的折射率。
3 用于海洋渔业资源探测的激光雷达
传统渔业资源调查采用的是声呐探测与拖网采样相结合的技术手段,与之相比,采用机载海洋激光雷达进行渔业资源调查具有显著的优势。由于该技术可避免对鱼群等探测目标物群体的惊扰,并在鱼群移动前覆盖足够大的探测区域,有效提高了资源调查数据的准确性和可信度;采用机载方式大大提高了探测效率,运行费用也远比采用水面船只低廉。
关于机载激光雷达探测鱼群可行性的研究始于上世纪70年代初[16]。1976年美国海军用机载的激光雷达成功探测到了南弗罗里达海域的鱼群,并用其测绘了新泽西沿岸水域鱼群的垂直分布剖面图[17]。在证实了激光雷达探测鱼群的可行性后,一直有人试图建立激光雷达信号与特定种类鱼群密度和数量的关联,而这需要对特定鱼种的目标强度有所了解,而目标强度与鱼种的反射率有关。所谓目标强度,是指被探测目标物反射的能量与入射光能量的比值[18]。最初激光雷达反射率的实验是在水槽中以死亡的鱼类作为探测目标进行的,Churnside和McGillivary对总共5种鱼类和一种乌贼进行了雷达反射率测量[19],实验结果显示,对于绿色偏振激光,不同鱼种的反射率数值分布在岩鱼的0.072和乌贼的0.148的范围内,退偏振度数值分布在凤尾鱼的0.132到另外一种岩鱼的0.345的范围内。1997年,Churnside等[20]采用532 nm偏振激光雷达对水箱中活体沙丁鱼的反射率进行了探测,实验结果表明,回波的平行偏振组分的漫反射率为9.7%,垂直偏振组分的漫反射率为3.1%,退偏振度为0.24。利用校正后的测量值,该研究小组对南加州海湾中沙丁鱼群的垂直剖面分布进行了测绘,并对海洋衰减系数和雷达信号的波动情况进行了实验测量[21]。
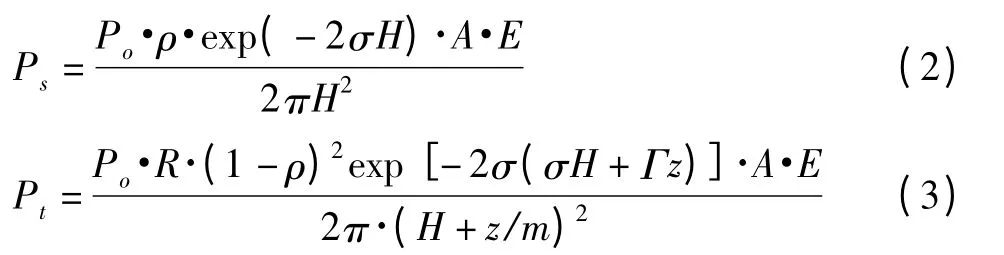
利用现成的商业化器件,美国国家海洋和大气管理局NOAA(National Oceanic and Atmospheric Administration)[22]研制出一台实验性海洋鱼群探测激光雷达FLOE(Fish Lidar Oceanic Experimental system)。随后FLOE系统不断改进,加配了一台彩色数字摄像机,并对信号处理技术进行升级以区分水体中鱼群与小颗粒的回波信号[23,24]。FLOE系统在北太平洋开展了一系列海洋生态环境调查活动,针对不同密度的鱼群和浮游植物的雷达探测数据与声呐探测和拖网取样的实测结果进行了比对,将激光雷达探测数据与声呐探测数据进行比对后发现,两者的探测结果非常接近[23],如图3所示。FLOE系统在加州海岸水域对凤尾鱼和沙丁鱼等商业鱼种也进行了资源调查[25],并被用于对枪乌贼以及其他海洋哺乳动物的探测[26]。2002年7月,挪威海洋研究所IMR(the Norwegian Institute of Marine Research)使用NOAA研制的FLOE系统对挪威海的鲭鱼密度和分布进行了测绘,以验证该系统作为资源调查手段的有效性。在挪威海完成一系列探测飞行后,7月26日-28日,FLOE系统被部署到IMR位于Austevoll的研究站,对不同尺寸的活体鲭鱼的反射率和目标强度进行了平行偏振和垂直偏振的测量[26]。
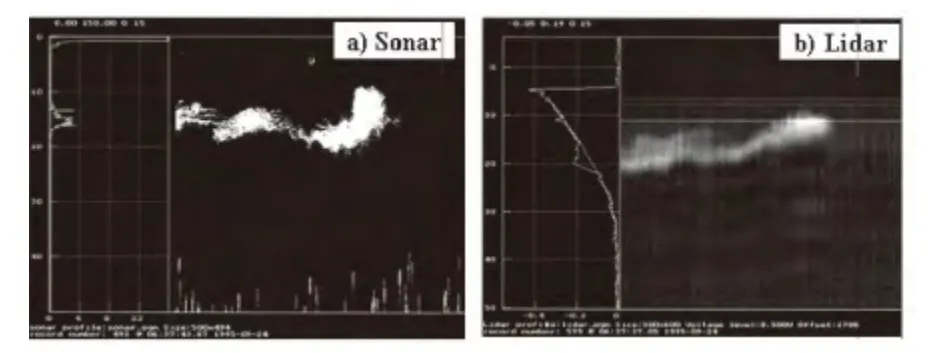
图3 针对相同鱼群的声呐探测数据(a)与激光雷达数据(b)对比图Fig.3 Comparison of synoptic acoustic(a)and lidar signal-return data(b)for the same school of sardines
2003年,NOAA环境技术实验室的Churnside等使用532 nm偏振激光器和增强型电荷耦合器件ICCD,研制了一款专用的鱼群探测成像激光雷达系统,利用ICCD摄像机的距离选通门控功能,成功探测到了浑浊水体中鱼群的反射图像,并使用改进后的图像滤波处理算法将原始图像3.4的信噪比提高到16.4[27],如图4所示。
2006年,西班牙的P.Carrera等[28]采用Churnside等研制的海洋激光雷达对欧洲南部的大西洋水域部分深海鱼种(凤尾鱼、沙丁鱼、鲭鱼、竹荚鱼)幼苗的分布区域和密度进行了测绘,并与声呐探测和拖网采样的实测结果进行了对比。根据实际对比结果对激光雷达的结构设计和数据处理方法进行了改进,以期通过激光雷达回波实现对特定鱼种丰度的估算。
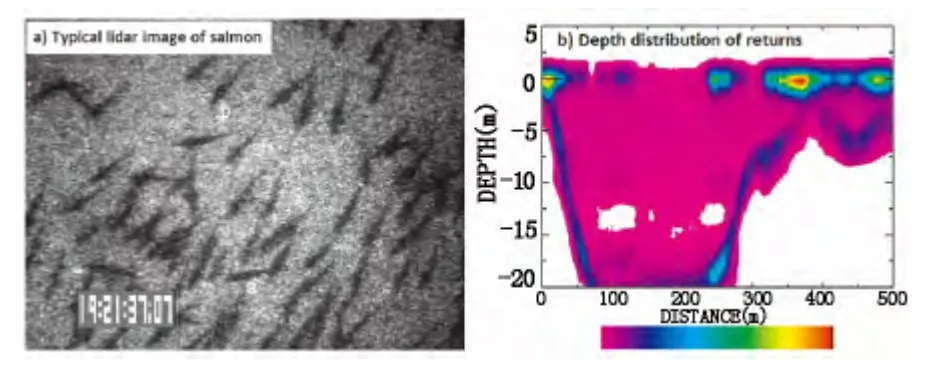
图4 NOAA海洋激光成像雷达探测结果a)ICCD探测图像b)深度剖面图(水面附近的强回波为鱼群位置)Fig.4 Detection results of NOAA oceanographic imaging lidar(High returns in green symbol near the surface are salmon)
2010年秋季,NOAA地球系统研究实验室的Churnside等使用新一代的机载海洋渔业资源监测雷达[29],对加州沿岸水域的沙丁鱼群进行长期观测。该雷达采用的是线偏振的调Q倍频Nd:YAG激光器,单脉冲能量120 mJ,脉冲宽度10 ns,重复频率20 Hz。在激光器前设置偏振分束器以提高激光束的偏振度,并利用垂直偏振透射偏振分束器后的微弱光信号触发光电二极管产生时间基准脉冲信号。出射激光束在600 m的飞行高度对人眼仍然不安全,因此通过发散透镜使光束产生8.5 mrad的发散角,并通过一组反射镜将激光束与作为接收器的望远镜在600 m的探测距离上调节为共轴状态,如图5所示。
Kaman航天公司生产了一种实用的激光水下成像设备KF-100Fish Eye机载激光探鱼系统[21]。该系统具有扫描和非扫描两种工作方式,可以探测单条鱼和鱼群,确定鱼群密度,并可区分海豚和金枪鱼,观察鱼的活动,在某些情况下可确认鱼的种类。横向搜索宽度200 m~1 000 m。当固定翼飞机速度为220 km/h时,在1 000 m搜索宽度条件下每小时可搜索40 n mile2;当直升机速度为148 km/h,在200 m搜索宽度条件下,每小时可搜索5 n mile2。探测深度为15 m,在操作员控制下,测深精度小于1.5 m。
除了对生物量进行估算,海洋激光雷达还可以用来研究特定鱼种的行为特点。例如,通过与安装在同一平台上的红外辐射计的观测数据进行比对,激光雷达的探测数据显示沙丁鱼群在西北太平洋的热锋面处产生聚集[30],这一探测结果证实了之前的猜测[31]。与目视观测手段相结合,海洋激光雷达在东南白令海水域[32]观测了鲸、海鸟、鲱鱼以及南极磷虾之间的掠食行为,并探测到了海面附近的鱼群对调查船只的躲避行为,这些探测结果也得到了其它探测手段的印证[33]。

图5 NOAA新一代海洋渔业监测激光雷达机载布放(左)与结构示意图Fig.5 Mounting configuration and schematic diagram of new generation NOAA fishery surveillance lidar
4 用于海洋生态监测的激光荧光雷达
浮游植物贡献了全球约40%的光合作用,是人类赖以生存的关键。人类社会快速的发展使脆弱的自然环境不断恶化,由此带来了针对海洋浮游植物监测和研究的迫切需求。而针对全球海洋水色的持续观测也给海洋上层水体的生物化学成分的科学认知带来革命性的变化。通过对浮游植物浓度在全球的空间分布、季节性周期以及年代演化趋势的探测,可以在空间和时间尺度上估算海洋初级生产力[1]。而活体浮游植物富含叶绿素a和藻红蛋白(PBP)等生色团,其浓度是反映浮游植物生物量的可靠指标。
基于激光诱导荧光(LIF)效应,海洋激光荧光雷达通过向水体发射紫外或可见光波段的短波长激光脉冲,并接收不同荧光活性粒子发射的荧光信号,并通过荧光信号的强度、荧光峰位、荧光寿命以及荧光偏振特性反演水体中荧光物质的种类和浓度,继而实现对浮游植物、CDOM、叶绿素等的遥感探测。海洋激光荧光雷达还具备探测混合藻类种群的结构信息和光生理学特征的能力。海洋荧光激光雷达是荧光光谱探测技术与激光遥测技术的完美结合,利用荧光激光雷达对海洋中的浮游生物和叶绿素、CDOM等有机组分进行探测,不需要取样、也不需要水下仪器的现场布放,操作简单、方便,对于海洋生物光学探测具有很大的便利性,是海洋荧光测量的理想仪器,特别是机载海洋激光雷达以其测量范围广、灵活方便,在海洋荧光探测和水质监测中得到迅速发展并广泛应用。世界上许多国家也发展了机载海洋荧光激光雷达系统,法国、德国等已成功的应用于业务化测量,如表1所示。
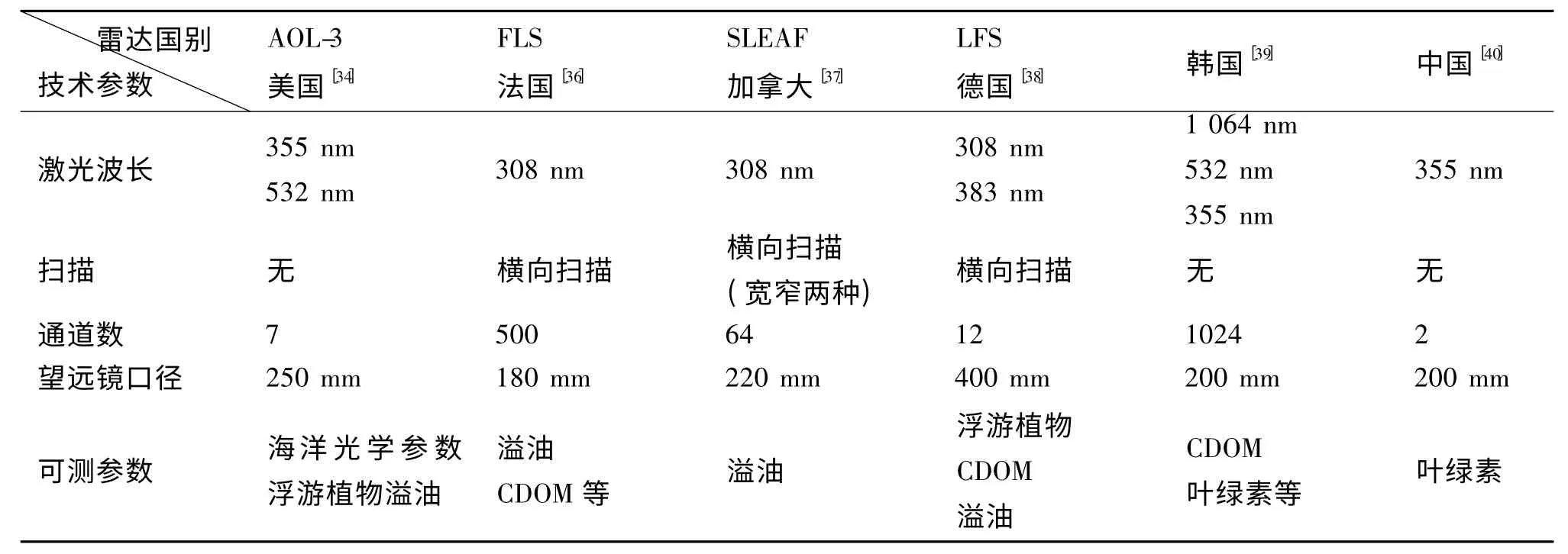
表1 部分典型机载海洋荧光激光雷达系统Tab.1 Several typical airborne laser fluorosensor systems
美国研制的AOL-3机载海洋激光雷达就是其中的代表[34],该激光雷达采用半导体泵浦固体激光器,同时发射532 nm和355 nm两个波长,接收子系统设有七个通道,可探测海水水体瑞利散射、拉曼散射以及叶绿素等有机组分荧光。

图6 AOL-III海洋激光雷达系统的结构示意图与机载布放图(右)Fig.6 Schematic diagram of AOL-III oceanographic lidar system and its mounting configuration on the aircraft
在此基础上,进一步发展了FEX/FEM LIDAR系统[35],该系统采用OPO可调谐激光器作为激发光源,OPO激光器调谐范围为410-680 nm,一个高分辨率ICCD光谱仪对激发的荧光光谱进行分光探测。法国研制的机载海洋荧光激光雷达系统FLS(Fluorescent Lidar System)结合被动高光谱成像仪(Hyperspectral Imager)对海洋表面的溢油污染和海洋生态环境污染进行监测[36]。FLS系统采用308 nm激光器作为激发光源,500通道光电二极管阵列作为探测器,光谱范围300-500 nm。德国Oldenburg大学[38]研制一套海洋荧光激光雷达系统(LFS),他们所采用的激光器的激发波长为308 nm和383 nm,采用12个接收通道接收海面受激发射的荧光,光谱覆盖范围为330-680 nm。飞机的工作高度为100-300 m,采用横向扫描工作方式,探测的刈幅宽度为150-450 m。该系统与红外/紫外线扫描仪一起使用,多次对浮游植物、黄色物质和海面溢油等进行了成功的探测。韩国的机载激光雷达系统[39]采用直升机作为运载平台,可对海水中叶绿素浓度、有色可溶有机物以及陆地植被进行探测,工作时飞行高度可至530 m,是目前文献报道中飞行高度最高的。系统激发光源采用Nd:YAG激光器,发射1 064 nm(600 mJ)、532 nm(280 mJ)和355 nm(100 mJ)波长,接收采用f/3、口径200 mm的望远镜,探测器采用1024通道ICCD。
中国海洋大学自“七五”国家科技攻关起相继进行了海表层温度、海洋光学参数、海洋荧光、悬移质、海底深度等方面的蓝绿光探测研究,并研制了相应的船载激光雷达系统,并在我国东海、黄海、渤海进行了大量的实验。十五期间,该实验室在参与承担的“航空遥感多传感器集成与应用技术系统”科研项目中研制成功了一套机载海洋荧光激光雷达用来测量海表层的叶绿素浓度。该系统搭载在中国海监B-3808飞机上相继在烟台、大连、青岛等海域进行了六个架次的飞行实验,取得了飞行海域的大量叶绿素浓度数据,并积累了丰富的机载海洋荧光激光雷达设计、制造、实验等方面的技术和经验[40]。该机载海洋荧光激光雷达的激发波长为355 nm,单脉冲能量为80 mJ,脉冲宽度8-10 ns,望远镜口径为200 mm,采用双通道光电倍增管接收光谱仪收集的404 nm海水拉曼荧光和685 nm叶绿素荧光。工作时飞行高度为150 m-300 m。
十一五期间,中国海洋大学进一步研制了24通道机载海洋荧光激光雷达系统[41],该系统先后经高塔试验和机载飞行试验,工作状态良好,可有效对海面溢油、CDOM、叶绿素a进行测量。目前采用多通道接收系统是国际上海洋激光雷达的普遍趋势,刘金涛等[42]在实验室中,以光学参量放大器(OPO)为光源,应用课题组研制的32通道激光雷达系统,实现了对三十余种中国海常见的浮游植物三维激光荧光光谱的测量。
结束语
海洋激光雷达与海洋生物探测相关的应用主要体现在渔业资源探测和海洋生态环境监测两个方面,前者常采用蓝绿光激光雷达,通过对激光回波信号的识别提取以获得鱼群分布区域和密度信息,结合偏振特征分析可对鱼群种类进行识别;后者常采用海洋激光荧光雷达,通过对激光诱导目标物发射的荧光等光谱信号的探测分析以获得海洋浮游生物及叶绿素等物质的种类和丰度分布信息。本文对这两种海洋激光雷达技术原理、国内外发展现状进行了详细的论述。目前这两种海洋激光雷达国外已有成熟的产品进行应用,我国尚处在跟踪研究阶段,有些技术和工艺问题还有待完善。
伴随着平台技术的发展和海洋信息化程度的提高,给海洋激光雷达技术提出了新的要求,其未来发展趋势和特点可归纳为以下几点。1)提高小型化自动化程度,以便搭载无人机、无人船等平台进行全天候无人值守自动测量;2)采用更多的激发波长和更多的探测通道,以获取更为全面的信息;3)通过与模型的结合、优化算法,为海洋调查提供更好的数据产品;4)通过与其他探测手段(如卫星遥感)相结合,以拓宽海洋激光雷达的应用范围。
[1] CHURNSIDE JH.Review of profiling oceanographic lidar[J].Optical Engineering,2014,53(5):051405-1-051405-13.
[2] COCHENOUR B,MULLEN L,MUTH J.Modulated pulse laser with pseudorandom coding capabilities for underwater ranging,detection,and imaging[J].Applied Optics,2011,50(33):6168-6178.
[3] CHURNSIDE JH,WILSON JJ.Airborne lidar imaging of salmon[J].Applied Optics,2004,43(6):1416-1424.
[4] GUENTHER G C,BROOKSM W,LAROCQUE P E.New capabilities of the‘SHOALS’airborne lidar bythymeter[J].Remote Sens Environ,2000,73(2):247-255.
[5] FINKL C W,BENEDET L,ANDREWS J L.Submarine geomorphology of the continental shelf off southeast Florida based on interpretation of airborne laser bathymetry[J].J Coastal Res,2005,21(6):1178-1190.
[6] HU Y,STAMNES K,VAUGHAN M,et al.Sea surface wind speed estimation from space-based lidar measurements[J].Atoms Chem Phys,2008,8(13):3593-3601.
[7] SHAW J A,CHURNSIDE J H.Scanning-laser glint measurements of sea-surface slope statistics[J].Applied Optics,1997,36(18):4202-4213.
[8] FLAMANT C,PELON J,HAUSER D,et al.Analysis of surface wind and roughness length evolution with fetch using a combination of airborne lidar and radar measurements[J].J Geophys Res,2003,108(C3):8058.
[9] YODER JA,AIKEN J,SWIFT R N,et al.Spatial variability in near-surface chlorophyll-a fluorescence measured by the Airborne Oceanographic Lidar(AOL)[J].Deep Sea Res.Part II Top.Stud Oceanogr,1993,40(1-2):37-53.
[10] LEIFER I,LEHR W J,SIMECEK-BEATTY D,et al.State of the art satellite and airborne marine oil spill remote sensing:Application to the BP Deepwater Horizon oil spill[J].Remote Sens Environ,2012,124:185-209.
[11] CHEKALYUK A,HAFEZ M.Advanced laser fluorometry of natrual aquatic environment[J].Limnol Oceanogr Methods,2008,6(11):591-609.
[12] HICKMAN G D,HOGG JE.Application of an airborne pulsed laser for near shore bathymetric measurements[J].Remote sensing of the Environment,1969,1(1):47-58.
[13] HANSEN K A,FITZPATRICK M,HERRING P R,et al.Heavy Oil Detection(Prototypes)Final Report[R].CG-926 RDC,June,2009.
[14] LEE JH,CHURNSIDE JH,MARCHBANKSR D,et al.Oceanographic lidar profiles compared with estimates from in situ optical measurements[J].Applied Optics,2013,52(4):786-749.
[15] BUFTON J L,HOGE F E,SWIFT R N.Airborne measurements of laser backscatter from the ocean surface[J].Applied Optics,1983,22(17):2603-2618.
[16] MURPHREE D L,TAYLOR C D,MCCLENDONI R W.Mathematical modeling for the detection of fish by an airborne laser[J].AIAA J,1974,12(12):1686-1692.
[17] SQUIRE JL,KRUMBOLTZ H.Profiling pelagic fish schools using airborne optical lasers and other remote sensing techniques[J].Mar Tech Soc J,1981,15(4):29-31.
[18] MACLENNAN D A,SIMMONDS E J.Fisheries Acoustics[M].London,Chapman&Hall,1992.
[19]CHURNSIDE J H,MCGILLIVARY P A.Optical properties of several Pacific fishes[J].Applied Optics,1991,30(21):2925-2927.
[20] CHURNSIDE J H,WILSON J J,TATASKI V V.Lidar profiling of fish schools[J].Applied Optics,1997,36(24):6011-6021.
[21] CHURNSIDE J H,TATARSKII V V,WILSON J J.Oceanographic lidar attenuation coefficients and signal fluctuations measured from a ship in the Southern California Bight[J].Applied Optics,1998,37(15):3105-3112.
[22] CHURNSIDE JH,WILSON JJ,OLIVER C W.Evaluation of the capability of the Experimental Oceanographic Fisheries Lidar(FLOE)for tuna detection in the Eastern Tropical Pacific[J]. NOAA Technical Memorandum,1998,ERLETL287:71.
[23] BROWN E D,CHURNSIDE J H,COLLINS R L,et al.Remote sensing of capelin and other biological fearures in the North Pacific using lidar and video technology[J].ICESJournal of Marine Science,2002,59(5):1120-1130.
[24] CHURNSIDE JH,WILSON JJ,TATARSKII.An airborne for fisheries applications[J].Optical Engineering,2001,40:406-414.
[25] LON C,HUNTERJR,CHURNSIDE JH.Modeling statistical performance of an airborne lidar survey system for anchovy[J].Fishery Bulletin U S,2000,98:264-282.
[26] TENNINGEN E,CHURNSIDE J H,SLOTTE A,et al.Lidar target-strength measurements on Northeast Atlantic mackerel(Scomber combrus)[J].ICES Journal of Marine Science,2006,63:677-782.
[27] CHURNSIDE J H,WILSON J J.Airborne lidar imaging of salmon[J].Applied Optics,2004,43(6):1416-1424.
[28] CARRERA P,CHURNSIDE JH,BOYRA G,et al.Comparison of airborne lidar with echosounders:a case study in the coastal Atlantic waters of southern Europe[J].ICESJournal of Marine Science,2006,63(9):1736-1750.
[29] CHURNSIDE JH,HANAN D A,HANAN Z D,et al.Lidar as a tool for fisheries management[J].Proc of SPIE,2012,8159:81590J_1-81590J_7.
[30] REESE D C,OMALLEY R T,BRODEUR R D,et al.Epipelagic fish distribution in relation to thermal fronts in a coastal upwelling system using high-resolution remote-sensing techniques[J].ICESJ Mar Sci,2011,68(9):1865-1874.
[31] GAULDIE R W,SHARMA SK,HELSLEY C E.Lidar applications to fisheries monitoring problems[J].Can J Fish Aquat Sci,1996,53(6):1459-1468.
[32] CHURNSIDE J H,BROWN E D,PARKER-STETTER S,et al.Airborne remote sensing of a biological hot spot in the Southeastern Bering Sea[J].Remote Sens,2011,3(3):621-637.
[33] DE ROBERTISA,HANDEGARD N O.Fish avoidance of research vessels and the efficacy of noise-reduced vessels:a review[J].ICESJ Mar Sci,2013,70(1):34-45.
[34] WRIGHT C W,HOGE F E,SWIFT R N,et al.Next-generation NASA airborne oceanographic lidar system[J].Applied Optics,2001,40(3):336-342.
[35] Http://oceancolor.gsfc.nasa.gov/DOCS/ScienceTeam/OCRT_Apr 2004/chekalyuk_ocrt04.pdf
[36] LENNON M,BABICHENKO S,THOMASN,et al.Combining passive hyperspectral imagery and active fluorescence laser spectroscopy for airborne quantitative mapping of oil slicks at sea.In ZAGAJEWSKI B,SOBCZAK M,WIZESIEN M,(eds)[R].Proceedings of 4th EAESel Workshop on Imaging Spectroscopy. EARSel and Warsaw University,Warsaw,2005,281-292.
[37] JHA M N,LEVY J,GAO Y.Advances in remote sensing for oil spill disaster management:Sate-of-the-art sensors technology for oil spill surveillance[J].Sensors,2008,8:236-255.
[38]REUTER R,WANG H,WILLKOMM R,LOQUAY K D,et al.A laser fluorosensor for maritime surveillance:measurement of oil spills[J].European Association of Remote Sensing Laboratories Advances in Remote Sensing,1995,3(3):152-169.
[39] LEE K J,YOUNGSIK P,BUNKIN A,et al.Helocopter-based lidar system for monitoring the upper ocean and terrain surface[J].Applied Optics,2002,41(3):401-406.
[40] 张凯临.机载海洋激光荧光雷达硬件设计与飞行实验[D].青岛:中国海洋大学.2005.ZHANG Kailin.The system design and experiments of the airborne fluorescence ocean lidar[D].Qingdao:Ocean University of China.2005.
[41] 李晓龙.海面溢油机载多通道激光雷达硬件设计与实验[D].青岛:中国海洋大学.2010.LI Xiaolong.Hardware design and field experiments of airborne lidar system for oil spill monitoring[D].Qingdao:Ocean University of China.2010.
[42] LIU Jintao,ZHANG Kailin,ZHANG Qianqian,et al.Measuring 3D fluorescence spectra of phytoplankton using an ocean lidar[J].Optoelectronics Letters,2010,6(1):54-56.
