基于AMESim的排土机司机室自动调平系统设计与研究
2014-03-18肖艳军韩静粉石亚茹关玉明
肖艳军,韩静粉,石亚茹,关玉明
(河北工业大学机械学院,天津300130)
排土机是露天煤矿连续或半连续开采成套设备的一部分,用于露天矿排土场和料场疏松物料的排弃和堆集用。随着露天矿开采工艺成套设备的推广应用,排土机自动化程度日益发达,但其司机室调平液压系统仍是手动控制,控制精度差。因此,改进司机室调平液压系统使其实现自动化有着非常重要的现实意义。
司机室自动调平系统连续、平稳以及高精度控制,是排土机司机室调平系统未来发展的必然趋势。考虑到其设计理念的完善性,需要对其进行动静态的分析。因此根据司机室调平机制对原液压系统进行改进并在此基础上设计出自动调平系统,用仿真软件AMESim 进行建模分析研究,代替液压系统实验十分必要。
1 司机室调平原理及分析
排土机在上仰12°到下俯8°的区间进行俯仰动作时,司机室反向在下俯12°到上仰8°区间运动。传统排土机司机室液压系统利用这个原理人工进行司机室调平。司机室调平结构如图1所示,通过控制调平油缸伸缩,带动平台一实现角度调整。现有某排土机司机室液压系统图如图2所示,其换向阀采用的是O型三位四通电磁换向阀。当排土机上仰或下俯某个角度时,电磁换向阀相应切换到左位或右位,从而实现调平油缸的收缩及伸长。司机室相应地下俯及上仰,实现调平。

图1 机构图
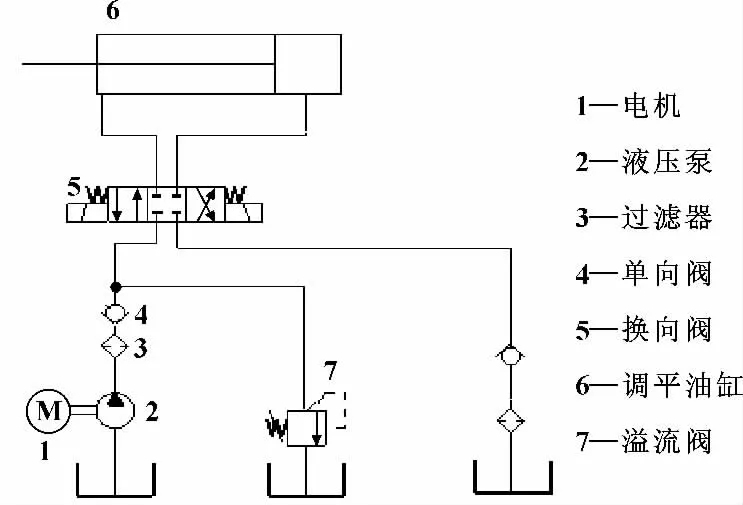
图2 原液压系统图
2 司机室调平液压系统改进
原司机室调平液压系统采用O型三位四通电磁换向阀的换向来实现调平油缸相应伸缩,完成司机室调平。但由于O 型三位四通换向阀在中位时,P、T、A、B 4 个进出油口是全封闭的,由左右位换到中位时油液通路的突然截止会给整个系统带来较大冲击,对电磁阀和调平油缸不利。且O 型三位四通电液换向阀的阀芯为滑阀,密封性较差,调平油缸在司机室重力作用下会缓慢下降,对司机室调平不利。
Y 型三位四通电磁换向阀在中位时,T、A、B 3个进出油口相通,由左右工作位换到中位时,P 口突然截止,整个回路中多余的油液依然会回到油箱,不会对调平油缸造成太大的冲击。而双向液压锁是由2个液控单向阀组成,单向阀的阀芯为球芯,密封性较滑阀要好。故Y 型三位四通电磁换向阀和双向液压锁配合使用代替O 型三位四通电磁换向阀对于原司机室调平液压系统的缺陷有较大改善。对原系统进行的改进如图3所示。
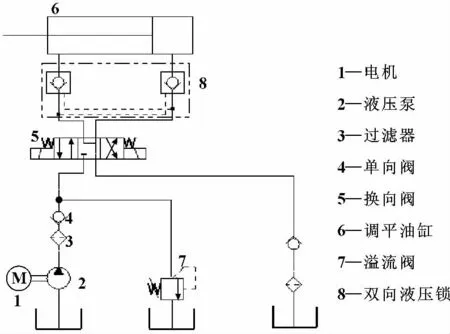
图3 液压图(改进)
3 自动调平司机室液压系统设计
排土机经过半个多世纪的发展,自动化程度日益成熟,而排土机司机室调平系统自动化程度低,依然是手动控制,控制精度差。因此提高司机室调平系统自动化程度及控制精度具有重大的现实意义。故在改进的司机室调平系统基础上设计出一种司机室自动调平系统。
在司机室平台适当位置安装角度传感器,工作时将平台和水平面间产生的角度传给转换器,经转换器转换处理为电磁信号后输送给驱动电路,驱动电路再将信号传送给电磁换向阀,使换向阀阀芯产生相应位移,继而调平油缸伸缩直到司机室平台产生与原倾斜方向相反大小相同的角度转动,最终实现司机室的调平。简化图如图4所示。

图4 自动调平液压控制系统简化图
为了便于对自动调平系统进行深入分析,首先需要建立该系统的数学模型,具体如下所示。
3.1 调平机构数学建模
其中L1为平台一与铰链之间的长度,为定值,L1=1 870 mm;L2为调平油缸长度,为变量值,且在水平状态下L2=1 668 mm;L3为调平油缸支座的长度;L4为斜撑的长度;由于L3和L4是固定的,故可等效为基架L5。由图5 得:


图5 调平机构简化图
设平台一与水平面所成角度为α:
代入数据,得:

公式(1)即为调平油缸长度L3和司机室平台旋转角度α 的关系式。它提供了司机室平台转角与调平油缸伸缩量关系的理论基础。
3.2 调平液压系统数学建模
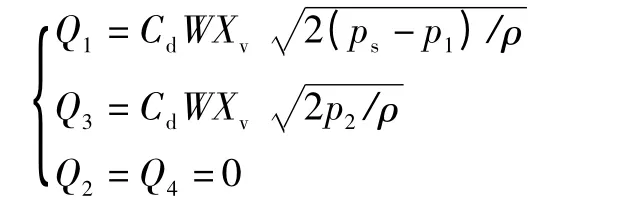
由于调平油缸为单活塞杆不对称缸,阀为对称的四通阀。如图6所示,由于活塞两腔面积不等,故流量是不连续的。流量方程与活塞运动的方向有关,此处只分析活塞向右运动的情况(即Xv>0)。

图6 非对称缸物理模型
阀的流量方程为
缸的流量连续性方程为

活塞运动方程为

其中:A1,A2为无杆腔、有杆腔工作面积(m2);V1,V2为无杆腔、有杆腔容积(m3);p1,p2为无杆腔、有杆腔工作压力(MPa);F1为总负载(N);Q1~Q4为通过阀口1 ~4 的流量(m3/s);Cd为控制窗口处的流量系数;ρ 为油液密度(kg/m3);W 为滑阀的面积梯度(开口周边总长)(m);FL为外负载力(N);FC为摩擦力(N);βe 为有效体积弹性模量(N/m2)。
以上阀的流量方程、缸的流量连续性方程、活塞运动方程为司机室调平液压系统提供了理论基础。
4 司机室手动调平控制液压系统动态仿真分析
AMESim 是IMAGINE 公司推出的基于功率键合图的机电液仿真分析软件,以其强大的仿真和分析能力在各个领域得到了广泛的应用,尤其在液压基本元件建模方面表现出色。它是一个方便、高效、直观的动态系统建模和仿真分析工具,用其进行仿真分析避免了繁琐的公式推导。
4.1 司机室手动调平液压系统AMESim 建模及参数设定
根据图2 的原系统液压图及图3 的改进系统液压图,分别在AMESim 中建立仿真模型。

图7 原液压系统模型

图8 液压系统改进模型
根据排土机实际参数对模型参数赋值。模型主要参数设定值如表1所示。

表1 模型主要参数
由图1,易知司机室调平油缸在0°时受力最大为1 000 N,在此处为方便研究把油缸受力设为恒定值1 000 N。由于比较的是这两种模型换向时对油缸冲击及泄漏量大小,故换向阀给定信号如图9所示。
4.2 司机室手动调平液压系统仿真分析
根据初始参数,对模型进行动态仿真,设定仿真时间为5 s,步长为0.001 s。分别得到两种模型调平油缸的无杆腔受力曲线和泄漏量曲线。
由图10(a)可得从初始时刻到达稳定值历时约0.3 s,在t=3 s 换向阀换向时,到t=4.2 s 才趋于稳定值,且波动较大。由图11 易知改进液压系统经过不到0.2 s 便趋于稳定值,换向阀换向时,在t=3.6 s趋于稳定,波动较小。比较图10(b)和图11(b)可知:原液压系统泄漏量及波动较大,且经过较长时间才能趋于稳定。利用AMESim 验证了单向阀和Y型换向阀配合使用比O 型换向阀要稳定,调平油缸受到的冲击较小,泄漏量较小。
图9 换向阀输出信号

图10 原液压系统仿真图
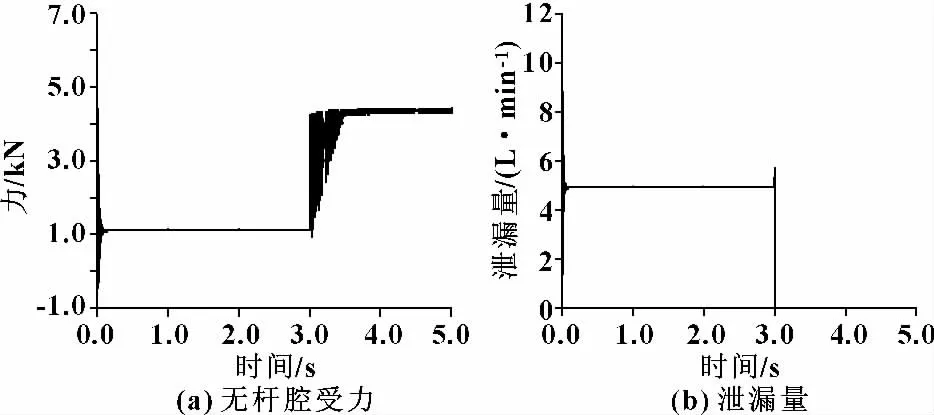
图11 改进液压系统仿真图
5 司机室自动调平控制液压系统仿真
5.1 司机室自动调平液压系统AMESim 建模及参数设定
由于调平油缸偏转角α 范围为[- 12°,8°],任意选取α 为5°进行分析。将其代入式(1),得L2=1 830 mm。故油缸伸长量ΔL =1 830-1 668 =162 mm。故设置参数除了换向阀控制信号及放大器K之外,别的都与液压系统改进参数一致。将换向阀控制信号设定为-0.162,K 设定为100。
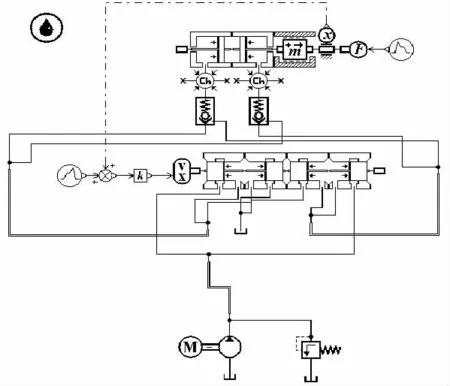
图12 自动调平液压系统模型图
5.2 司机室自动调平液压系统仿真分析
设置总仿真时间为10 s,仿真步长为0.001 s。仿真结果如图13所示。
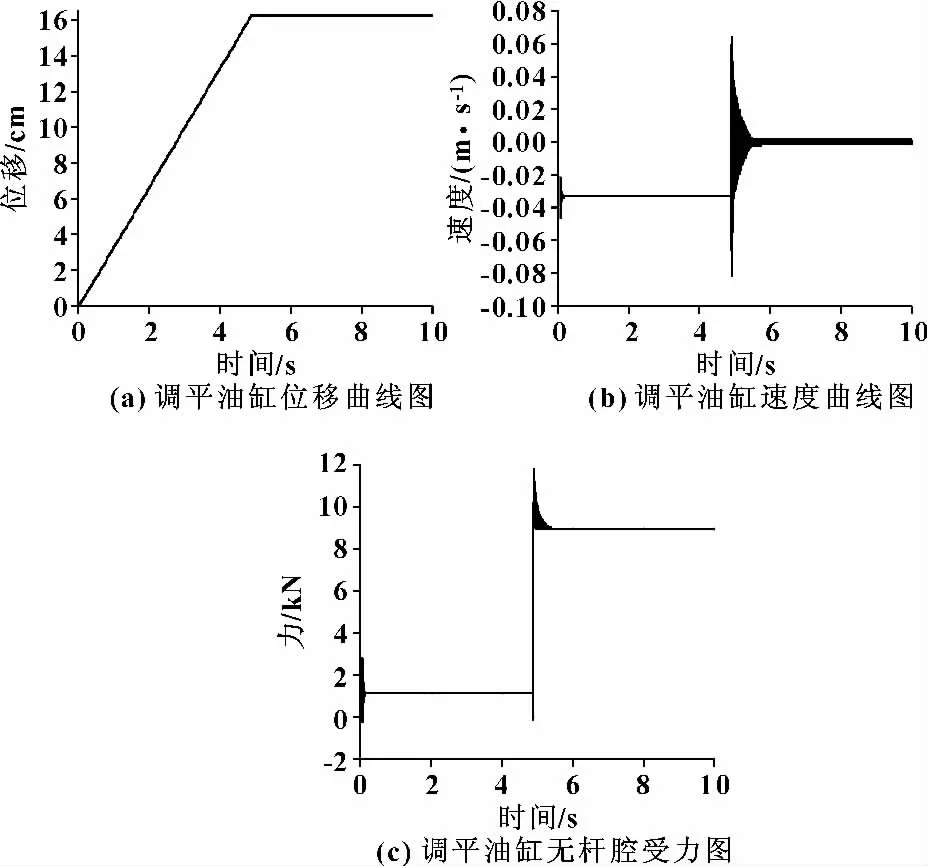
图13 自动调平液压系统仿真图
由图13 可知:调平油缸伸出量基本上接近预定位移0.162 m,在自动调节过程中虽有波动,但经过一定时间调节后基本稳定,证明了建立的自动调平液压系统模型图正确性及该系统的可行性。
6 总结
通过分析排土机司机室调平机构调平机制,分析了原司机室调平液压系统缺陷,并提出改进;在改进系统基础上,提出了司机室自动调平系统,并运用AMESim 对3 个系统进行了分析验证。通过文中分析,得到结论:
(1)通过AMESim 软件验证了改进司机室调平液压系统Y 型电磁换向阀和双向液压锁比原系统O型电磁换向阀优异,改进系统较稳定,泄漏量较小。
(2)在改进系统基础上提出了司机室自动调平系统,提高了精度,实现了自动化。通过AMESim 软件仿真分析得出仿真结果图,验证该自动调平液压系统正确性。
【1】王欣,宋晓光,滕儒民,等.基于MATLAB 高空作业车电液比例调平系统仿真研究[J].机床与液压,2008,36(4):162-164.
【2】排土机.有道词典.2012.
【3】胡元.高空作业车工作平台调平机构[J].工程机械,2006(12):31-32.
【4】高崇金,李新华.高空作业车自动调平系统的研究[J].山西建筑,2008,34(31):331-332.
【5】罗天洪,尹信贤,吴韩,等.基于AMESim 的高空作业车调平系统仿真[J].计算机集成制造系统,2012(1):120-126.
【6】李玲珑,孙斌,张奇峰.阀控非对称缸液压伺服系统建模与仿真分析[J],煤矿机械,2011,32(10):89-91.
【7】靳宝全.基于模糊滑模的电液位置伺服控制系统[M].北京:国防工业出版社,2010.
【8】付永领,祁晓野.AMESim 系统建模与仿真[M].北京:北京航空航天大学出版社,2006.
