天津地铁3 号线列控系统故障及行车组织处置原则浅析
2014-03-17付强,王丹
付 强,王 丹
(1.天津市地下铁道运营有限公司,天津 300222;2.天津铁道职业技术学院,天津 300240)
0 引言
天津地铁3 号线采用了基于通信的列车控制系统(Communication Based Train Control,简称CBTC)。自2012 年底试运营以来,系统运行状况总体稳定,为运营的安全与稳定提供了有力的保障。虽然系统采用了先进的控制技术、计算机技术、冗余技术、网络通信技术,充分实现了系统的集成化、网络化和自动化,同时采用了高安全性设计,主要设备均采用多重冗余技术,但故障的发生在所难免。本文主要分析设备故障的主要类型,对行车组织的影响及应对措施。
1 概况
1999 年9 月,美国电气和电子工程师协会(IEEE)将CBTC 定义为:利用高精度的列车定位(不依赖于轨道电路),双向连续、大容量的车地数据通信,车载、地面的安全功能处理器实现的一种连续自动列车控制系统。由于采用了先进的列车定位技术、安全处理器技术和无线通信技术,CBTC 技术较基于轨道电路的列车控制系统具有如下优点:
①通过车地双向通信,实现对列车的闭环控制,大大降低人为错误,提高可靠性;
②调度人员可实时掌握列车位置、速度等参数,更好地指挥行车;
③根据列车运行状态,结合列车运行智能调整技术,实现运行节能和舒适度提升;
④列车参数自动提供给监控系统,将控制与管理紧密结合,提升信息化水平;
⑤减少轨旁设备,将设备集中在车站和机车上,减轻管理维护的工作强度,受环境影响小;
⑥可实现移动闭塞。
CBTC 系统的车地通信传输方式有查询-应答器、感应回线和漏泄电缆等几种。天津地铁3 号线采用的CBTC 是Bombardier 公司研发的CITYFLO650 系统。该系统通过漏缆方式进行无线通信传输,实现车-地间双向的、连续的通信,提供了移动闭塞、列车自动驾驶等功能。
2 系统结构及功能
2.1 基本结构
CITYFLO650 列控系统包括ATS、车载ATC(VATC)、轨旁ATC(WaysideATC)、计算机联锁(CBI)及实现车地信息双向传输的无线通信网络(NRS)等几个部分,基本结构如图1 所示。该系统控制全线列车运行是基于划分的区域来工作的。根据系统设备的容量,全线划分为若干个控制区域,将轨旁ATC 设备和联锁设备安装在区域内的某一个车站,在通信网络的互联下负责整个区域信号设备和列车的控制。

图1 CITYFLO650 列控系统基本结构示意图
图1 中可见,ATS 系统分为两级:中央级ATS(CATS)和本地级ATS(LATS),分设于控制中心和车站。VATC 设备包括车载ATP(VATP)和车载ATO(VATO)两类主要设备,安装在列车内部。轨旁ATC 设备包括区域ATP (RATP)和区域ATO(RATO)两类设备,设置在区域控制站。CBI 包括联锁核心系统(CIS)和目标控制器系统(OCS),设置在区域控制站和设备集中站。轨旁设备与列车的数据通信则通过无线通信网络(NRS)实现。
2.2 基本功能
2.2.1 VATP
VATP 执行所有安全相关操作,基本功能包括:①列车初始化。②与RATP 通信。从RATP 接收进路、冲突位置和限速等信息,并发送驾驶模式、速度、方向等信息给RATP。列车要采用ATP、ATO 等模式运行,必须要与RATP 建立通信。③与RATO 通信。④安全制动。根据各种影响因素计算安全制动距离,确保列车任何时间内都能安全制动。⑤超速防护和制动保证。⑥后溜防护。⑦车门控制联锁。⑧发车联锁。⑨列车定位。⑩车轮直径校准。
2.2.2 VATO
VATO 只执行非安全相关的功能,其故障与否不会影响安全。VATO 的主要功能是执行牵引/制动控制、门控制和人机界面等。
2.2.3 RATP
RATP 执行列车安全相关的操作,主要功能有:①列车初始化。②列车删除。③列车追踪。通过获取列车定位信息,实时计算列车的移动授权,并将列车位置和移动授权发给RATO 和ATS,通过激活冲突点来确定列车移动授权,实现CBTC 列车的追踪防护。④计算列车移动授权。⑤确保追踪列车安全的间隔。⑥实现混跑模式,保证CBTC 列车能够安全地追踪非CBTC 列车运行。⑦列车完整性防护。⑧强制限速。⑨屏蔽门智能控制。⑩区域控制权的交接。⑪RATP 后备系统切换和远程重启。⑫道岔监控。⑬接近锁闭监控。⑭信号监控。⑮运行方向控制。⑯PEP 监控。⑰列车站停防护。⑱自动折返和无人自动折返。
2.2.4 RATO
RATO 主要用以实现正线非安全类的运营监控功能,如计划进路和联锁进路的请求、调整列车运行性能、控制屏蔽门开关门、处理和记录报警信息等。
2.2.5 CIS
CIS 负责通过安全或非安全的通信接收并处理来自控制中心的指令,执行联锁功能,发送命令至OCS,接收来自OCS 的轨旁设备状态信息并发送状态指令至控制中心。
2.2.6 OCS
OCS 负责控制轨旁目标(如信号机、转辙机),接收并执行来自CIS 的命令,监视目标状态(如计轴、信号机等)并发送状态信息至CIS。
2.2.7 NRS
NRS 提供车-地间的双向通信。中央控制系统通过以太网连接轨旁网络无线组件(WNRAs)发送有关信息,WNRAs 连接轨旁漏缆,漏缆与列车漏缆天线实现通信。控制系统传输至列车的信息主要包括进路(移动授权)、目标地、限速、冲突点、性能调整等;列车发送的信息主要包括列车位置、虚拟占用、列车速度和方向、驾驶模式、警报和诊断等。
3 常见故障类型
根据CITYFLO650 系统中设备安装的位置,可将设备故障分为车载设备故障和轨旁设备故障两大类,见表1。
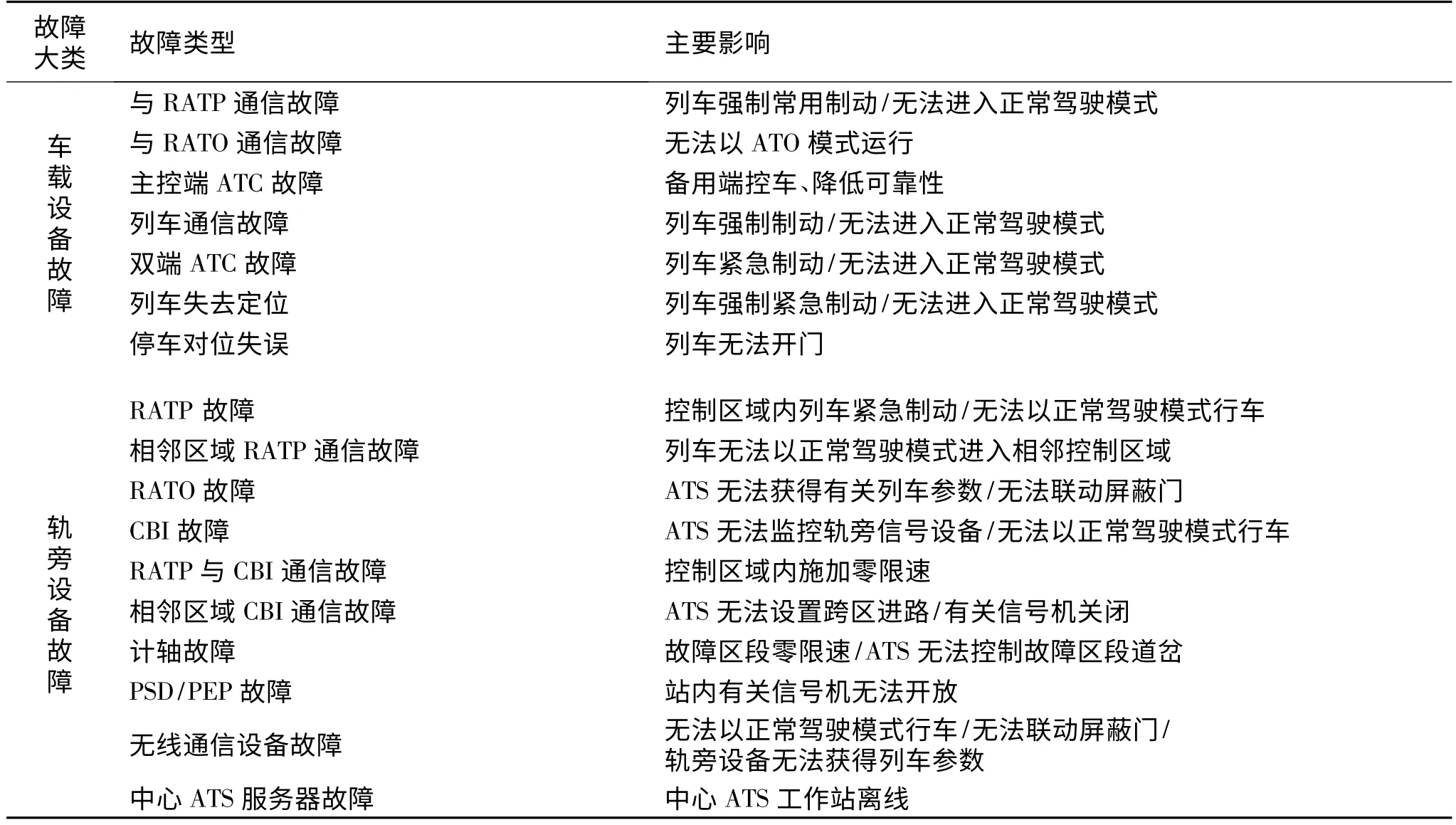
表1 CITYFLO650 基本故障类型
4 常见故障应对措施
故障原因千差万别,但故障造成的影响或现象是有相似之处的。根据CITYFLO650 系统常见故障现象及影响,天津地铁公司制定了合理的处置原则和行车组织方式。
4.1 单个列车丢失车地通信
单个列车车地通信中断,其原因可能是多方面的,如漏缆天线故障、移动数据电台故障、通信处理器故障、VATO 处理器故障、VATP 处理器故障等。车地通信中断时,列车信号人机界面中会显示RAD打叉的提示,同时列车无法进入正常的驾驶模式,ATS 也将无法显示故障列车的有关运行参数。行车指挥人员应组织故障列车降级为人工驾驶模式行车,组织车站手工开关屏蔽门、配合乘降作业。列车故障无法消除的,还应组织故障列车退出运营。
4.2 多个列车丢失车地通信
当多个列车在某一个范围同时丢失车地通信时,可能是由于该区域内无线通信设备故障。此时,行车指挥人员应组织区域内列车降级为人工驾驶模式运行,并将该区域降级为站间闭塞法组织行车,同时组织车站手工开关屏蔽门、配合乘降作业,直到故障消除。
4.3 计轴区段非正常占用
当ATS 显示单个或多个计轴区段非正常占用时,可能是由于计轴磁头、计轴板卡等故障造成的。此时故障区段将被施加零限速,列车无法以正常驾驶模式(ATP/ATO)通过该位置。行车指挥人员应组织有关设备集中站对故障计轴区段实施计轴预复位操作,并让列车以限制人工驾驶模式通过该区域,以尝试恢复正常,同时组织信号维护人员处置故障。若故障无法消除,应组织列车降级为人工驾驶模式在故障所在区域运行,同时降级为行车闭塞法组织行车。若故障计轴区段包含道岔区段,应组织有关设备集中站配合使用计轴旁路操作,完成道岔的转换,维持列车正常转线。若整个集中站范围计轴均故障,直接降级组织行车,直至故障消除。
4.4 计轴区段非正常占用且车地通信中断
当ATS 显示某一个或几个集中站范围计轴全部非正常占用且范围内列车均失去车地通信时,此情况下ATS 无法监视列车位置,此时应降级为电话闭塞法组织行车,列车按人工驾驶模式运行。
4.5 控制区域零限速
当ATS 显示整个控制区域内轨道均被施加零限速时,应组织该区域列车降级为人工驾驶模式按站间闭塞法行车,直到故障消除。
4.6 联锁中断
当ATS 显示整个控制区域内轨道紫光带时,可判断是联锁系统故障造成,此时应降级该区域行车闭塞法,列车按人工驾驶模式行车。对于包含折返站的,应组织有关人员实施手摇道岔作业维持列车折返。若与此同时出现列车通信中断的现象,必须做好列车定位后,降级为电话闭塞法组织行车。
4.7 ATS 离线
当中央ATS 服务器故障造成中央ATS 工作站离线时,ATS 工作站将无法正常显示和操作,并有服务器离线状态显示,此时应组织车站降级为紧急站控模式控制行车。
4.8 道岔失表示
当ATS 显示道岔无表示时,可能是有关控制板卡、继电器或转辙机内部电路故障造成。此时,应通过ATS 尝试操作;无法恢复时,应立即组织变更折返进路维持运营或者手摇道岔作业维持折返,直到故障消除。
5 结束语
天津地铁采用的CITYFLO650 列控系统技术含量高、结构复杂,行车专业人员应对设备系统结构及基本功能进行全面了解,在理解列车控制基本原理的基础上,掌握故障现象及对行车的影响,进而制定设备故障条件下行之有效的行车组织方法,这是行车技术管理人员重点研究和思考的内容。
[1]曾小清,王长林,张树京.基于通信的轨道交通运行控制[M].上海:同济大学出版社,2007.
[2]吴秋颜.庞巴迪信号系统在天津地铁2~3 号线的应用[J].民营科技,2012(8):41.
[3]马卫.CBTC 系统在天津地铁3 号线的应用[J].铁道通信信号,2013,49(10):20-22.
[4]张丽.计轴在CBTC 轨道区段的使用[J].郑州铁路职业技术学院学报,2013,25(2):19-20.
[5]王金魁.计轴系统工作原理及常见故障处理[J].电子世界,2014(2):70.