基于WTB/MVB总线的轨道车辆LED照明控制系统设计*
2014-03-16张邦成谭海东郝明亮尹晓静
张邦成 ,谭海东 ,郝明亮 ,尹晓静
(1.长春工业大学 机电工程学院,吉林 长春130012;2.长春研奥电气有限公司,吉林 长春130062)
目前大部分轨道车辆车厢内使用的还是传统的荧光灯作为光源,其能耗大,使用效率低。LED具有效率高、绿色环保、寿命长、能量转换效率高、抗振性能好等优点,其在轨道车辆领域的应用也越来越受到关注[1]。考虑到轨道车辆车厢照明系统在冲击震动、电磁兼容、温度及供电范围等方面都有特殊要求,现有的LED照明系统硬件不能直接应用于轨道车辆车厢当中,研究开发抗干扰能力强、散热性好、工作稳定的轨道车辆车厢LED照明系统硬件对于改进轨道车辆车厢照明系统具有非常重要的意义[2]。另外,随着生活质量的提高,人们对轨道车辆舒适性的要求也越来越高,实现轨道车辆照明系统的自动调光将会大幅提高能源利用率,改善车厢照明条件,提高轨道客车的照明舒适性。
因此,本文针对铁轨道车辆车厢LED照明控制系统的特点,设计基于WTB(绞线式列车总线)和MVB(多功能车辆总线)相结合的轨道车辆车厢LED照明控制系统。
1 LED照明控制系统硬件设计
设计的硬件系统主要分成三部分:(1)车厢内照明部分,采用LED作为发光源,设计了LED的驱动电源来控制LED的驱动电流;(2)信号采集与处理部分,亮度传感器采集的亮度信息通过单片机处理反馈给安装在车头控制室内的上位机IPC机,利用上位机软件完成数据融合处理;(3)信息传递部分,IPC机处理后的数据信息通过WTB总线传给各节车厢的MVB总线,以保证控制信号的高效传输[3]。总体硬件连接框图如图1所示。

图1 总体硬件连接框图
在图1中,利用分布在各节车厢的单片机执行IPC机的控制指令控制驱动电源,实现LED灯的自动控制。通过各部分的共同作用,实现了对轨道车辆LED照明系统的控制。
2 LED照明控制系统硬件模块设计
2.1 通信模块的设计
WTB总线用于构成经常动态编组以及多节车辆级联的开放式列车,可实现车辆间的数据通信;MVB总线用于一个车辆内设备或者一个固定的车辆组内设备的数据通信,在一个车辆组内最多可以连接4 096个传感器并且可以实现信息的高速传输[4]。WTB总线与MVB总线之间通过网关连接。选择这两种通信总线结合使用的方式,既能保证传输的高效性和准确性,也因为两种总线的成熟应用节省了重新选择总线所带来的各种问题。
2.2 硬件散热壳体的设计
LED发光过程中将约62%的电能转化成热能。因此,解决LED灯的散热问题对LED的使用寿命非常重要。在基板与LED灯之间增加一层铝制薄板来增加散热效率,采用这样的设计使得LED灯的散热效果良好,有效降低了LED工作时温度,延长了使用寿命[5]。
2.3 LED排列方式的选择
LED灯的排列方式一般有三种类型:串联方式、并联方式、混联方式。将所有的LED串联或并联,不但限制LED灯的使用数量,而且并联LED负载电流较大,驱动器的成本也会增加。综合考虑串/并联两种方式的优缺点,采用串/并联混合连接方式。同时,为了提高照明系统的容错性,采用交叉混联排列方式,如图2所示。在同一条串联支路中,若有一个LED灯损坏,使一条串联的LED灯不能调节时使用交叉式排列,在机械结构的同一行,间隔性的还有LED灯正常工作,从而克服了串联LED灯损坏导致整行亮度不能调节的缺点。
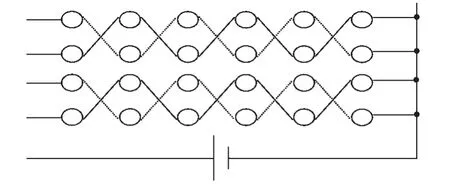
图2 LED灯排列方式
2.4 亮度采集模块设计
在保证照明控制系统对环境亮度信息的高速处理能力同时节约成本的前提下,结合轨道车厢的环境要求,选择STC89C52单片机作为亮度采集模块的微处理核心[6]。与单片机的P2引脚连接的模/数转换芯片是ADC0804,实现模/数转换;选择三洋系列LA0150CS照度传感器,分布在车厢的不同位置,实现对亮度信息的高速处理。亮度采集模块如图3所示。
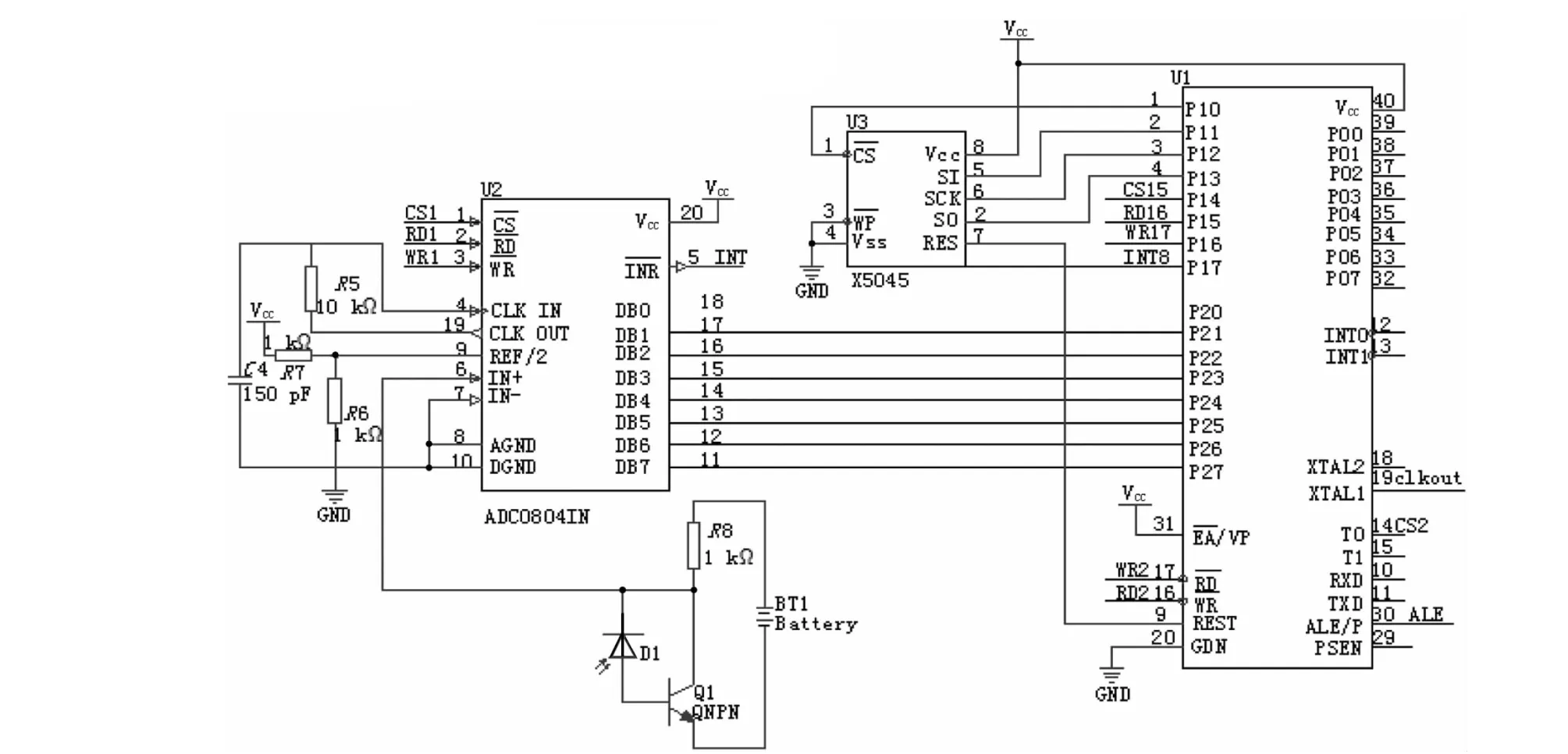
图3 亮度采集模块
2.5 硬件驱动电源设计
由于轨道车辆采用外部供电,高压电经过变压后供车厢内部电路使用,在降压过程中会产生谐波干扰,为了消除电网中的电磁干扰,设计了EMC(电磁兼容性)滤波电路。采用桥式整流滤波电路,将220 V的工频电流转换成一定的直流电后进行降压变换,再经过正激式DC/DC变换器变换为特定电压的稳压直流电,以供LED照明。其工作流程图如图4所示。
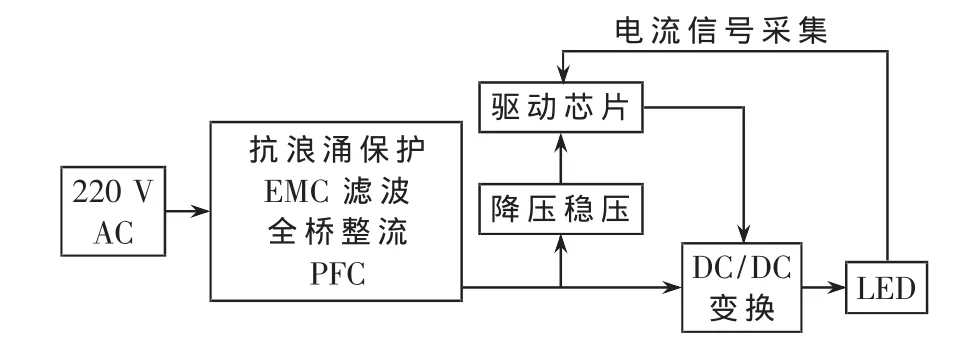
图4 驱动电源工作流程图
选择PT4107作为驱动芯片,PT4107能够输出范围为18 V~450 V的电压,能够驱动上百个LED的混联应用,可外部设定过温保护,可通过PWM数字脉冲控制达到改变LED亮度的目的,满足轨道车辆车厢LED照明驱动要求[7]。同时,设置了PFC(功率因数校正)电路,克服了桥式整流滤波电路后功率因数降低的问题,使电源的功率因数大大提高。
3 硬件驱动电源仿真及实验
采用临界比例度法对PID进行参数整定并进行驱动电源的仿真分析。利用PID算法对PWM占空比进行控制,从而控制驱动电源的输出电流,使LED的发光达到预定值。利用Matlab对控制算法进行仿真[8],将调节器的积分时间 T1置于最大(T1=∞),微分时间置零(τ=0),比例度δ适当,平衡操作一段时间,把系统投入自动运行。将比例度δ逐渐减小,记下临界比例度δk和临界振荡周期Tk的值。根据δk和Tk的值,采用表1中的经验公式,计算出调节器的各个参数,即δ、T1和τ的值。
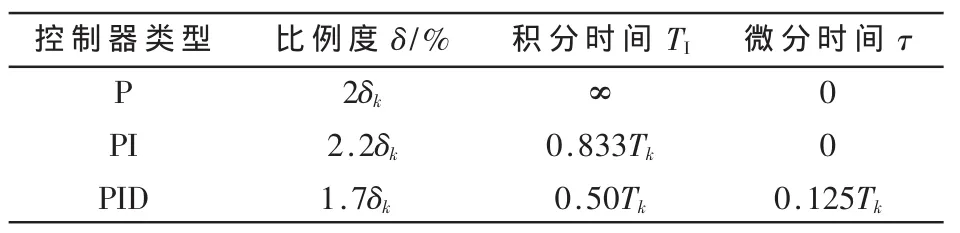
表1 PID参数整定
按先比例后积分最后微分的操作程序将调节器整定参数调到计算值上。通过临界比例度法对PID传递函数中的参数进行整定,整定后的传递函数是:

图5是对PID参数整定后的仿真结果。可以看出,通过对PID参数的整定,控制曲线在1 s以内达到稳定值,系统响应速度快,无超调。

图5 PID参数整定仿真效果
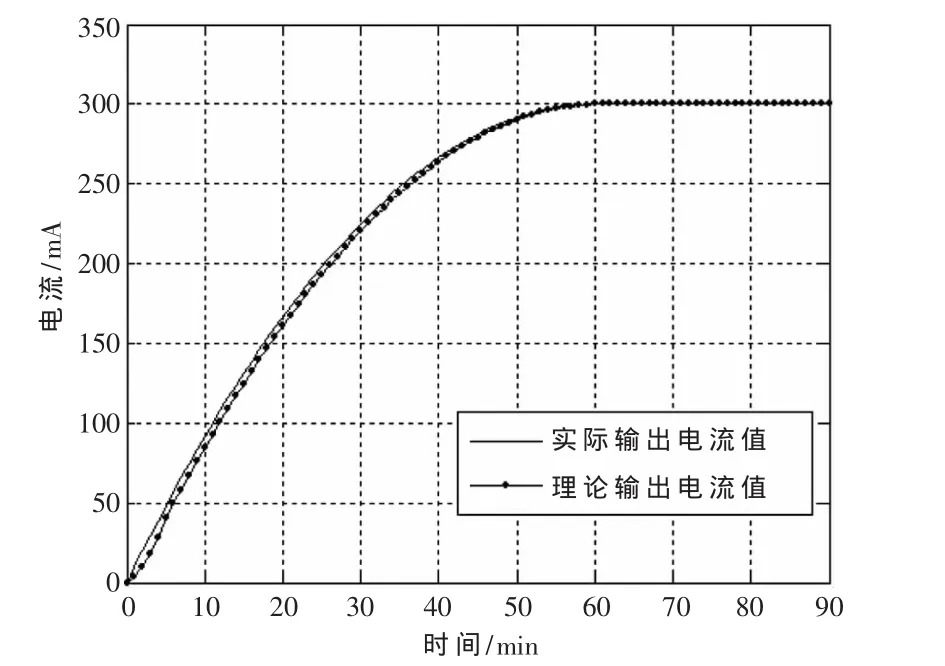
图6 模拟傍晚天逐渐暗时的仿真曲线
为了检验驱动电源的自动调节能力,通过模拟傍晚天色逐渐变暗的过程得出了LED灯电流的仿真曲线图,如图6所示,图中实曲线是系统根据亮度变化过程应该输出的电流值,带点曲线是仿真中得到的系统输出电流的曲线。从图6可以得出,系统实际输出电流值与理论输出电流值相差很小,能够满足亮度自动调节的要求。
将传感器采集的数据量传给IPC机进行数据融合,系统再根据融合得到的环境亮度值对LED灯发送不同占空比的PWM信号进行调光。实验过程如图7所示。
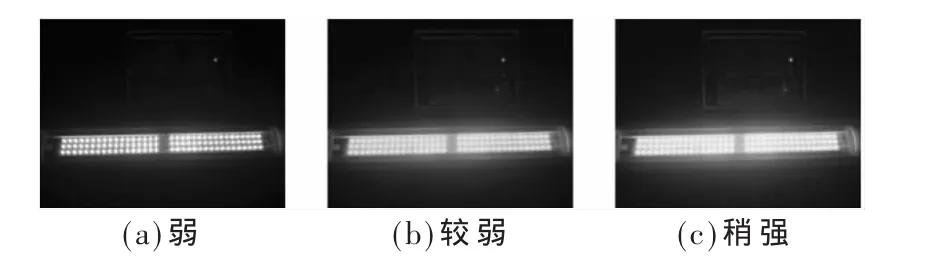
图7 LED灯的调光过程
图 7中,(a)、(b)、(c)分别为外界环境亮度不同时,LED照明系统的自动调光过程。表2为实验数据。
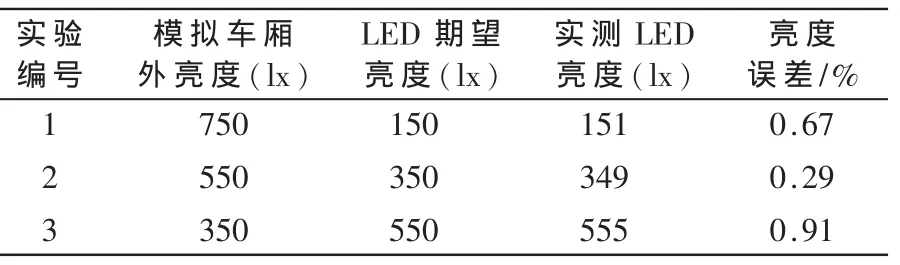
表2 实验数据
由表2可见,设计的硬件系统可以实现对车厢内LED灯亮度的自动调节。对数据进行分析可知,系统对车厢亮度的调节误差小于1%,满足系统对轨道车辆车厢的LED照明控制的要求。
本文设计的基于WTB总线和MVB总线的轨道车辆车厢LED照明系统采用集中式控制方式,根据车厢LED照明调光要求对LED灯样机进行实验验证,通过模拟傍晚由明到暗的过程对设计的硬件系统进行了调光实验。实验结果表明,设计的硬件系统工作状态良好,无噪音,LED灯发光均匀稳定,能够实现自动调光,验证了本文硬件设计的正确性和合理性。
[1]王雅芳.基于照明特性分析的串联饱和型恒流驱动设计[J].电力电子技术,2009,43(4):53-54.
[2]罗晓霞.LED照明系统的优化设计[D].长春:长春光学精密机械与物理研究所,2011.
[3]李国平.列车通信网络 WTB/MVB与 Lon Works的技术比较与应用[J].铁道车辆,2004,42(1):22-25.
[4]李常贤,邹积岩,赵明花,等.一种基于 MVB网络通信的中央控制设备设计方案及其实现[J].铁道学报,2010,32(2):125-130.
[5]汪双凤,胡艳鑫,陈金建.应用于LED灯具散热的平板热管传热特性[J].工程热物理学报,2012(8):1371-1374.
[6]杨旸,赵梦恋,陆佳颖,等.高亮度白光 LED驱动控制器设计[J].浙江大学学报(工学版),2010,44(1):111-117.
[7]陆彦超,隋修武,杜玉红,等.基于模糊控制的锂电池恒流放电系统[J].电子技术应用,2013,39(9):89-92.
[8]王素青,姜维福.基于MATLAB/Simulink的PID参数整定[J].自动化技术与应用,2009,28(3):24-25.
