基于GPS的高度计海面高度定标浮标设计
2014-03-14陈春涛闫龙浩张晓旭翟万林朱建华
陈春涛,闫龙浩,张晓旭,张 倩,翟万林,朱建华
(国家海洋技术中心,天津 300112)
基于GPS的高度计海面高度定标浮标设计
陈春涛,闫龙浩,张晓旭,张 倩,翟万林,朱建华
(国家海洋技术中心,天津 300112)
全球定位系统(GPS)浮标是高度计海面高度定标的重要仪器。本文介绍了GPS浮标的组成和工作原理,分别对GPS浮标的外型设计、舱体设计、密封性设计、供电设计做了详细介绍,最后利用数值模拟的方式,对设计的GPS浮标在3级海况下的摇摆和升沉响应进行模拟试验。结果表明自主设计的GPS浮标能够满足海上高度计海面高度定标的需求。
卫星高度计;定标;GPS浮标;数值模拟
1 前言
全球定位系统(GPS)凭借在获得精确时间和定位信息方面的技术优势,已经在卫星定位、海洋勘测、地形测绘等领域发挥了重大的作用[1,2]。国际已经将GPS应用到高度计海面高度定标研究中,研制出可用于高度计海面高度定标的GPS浮标,并应用于业务化运行的卫星高度计的定标工作中。高度计业务化的广泛应用与高度计发射后的定标是密不可分的。
卫星高度计海面高度定标主要采用验潮仪和GPS浮标。其中,GPS浮标法具有直接在星下点对高度计进行定标,不受潮汐模型和大地水准面影响的优点,在高度计定标研究中广泛使用。Exertier P等[3]于1998年在Corsica采用自行设计的GPS浮标,对TOPEX/Poseidon(T/P)卫星高度计进行了定标,并与验潮仪数据进行了对比,两者差异在1 cm范围内。Cheng K等[4]于1999年在伊利湖利用自制的GPS浮标对T/P卫星高度计进行了绝对定标,其定标结果与验潮仪得到的结果相符。Schueler Torben等[5]利用自制的桶状GPS浮标,在Menorca东部对Envisat卫星高度计进行了定标,利用单频GPS浮标得到的海平面高度的偏差达到了5 cm。Watson等[6]在澳大利亚的Bass海峡定标场,采用自制GPS浮标结合验潮仪进行定标工作,并采用GPS浮标测量数据对验潮仪定标法进行校正。
我国卫星高度计发展起步较晚,但经过不断努力,近年来也取得了一定成果。2002年12月发射的神舟四号(SZ-4)飞船搭载有高度计,获得了初步成功,反演了各项海洋参数,取得了良好的效果。2011年8月,第一个海洋动力环境卫星海洋二号(HY-2)卫星发射成功,高度计是其中重要的载荷之一。但是高度计海面高度绝对定标工作一直没有开展起来,因此急切需要开展自主的高度计海面高度定标工作。
本文针对目前国内高度计海面高度定标的需求,在高度计海面高度定标方面开展高精度GPS浮标设计工作,并通过数值模拟的方法保证设计浮标的稳定性和随波性,为进一步的浮标研制和高度计海面高度GPS定标打下基础,进而为业务化高度计定标提供技术和积累经验。
2 GPS浮标组成及工作原理
2.1 浮标组成
基于GPS的测高浮标由安装浮球的三角架、舱体、GPS接收机、电池、密封盖板、扼流圈天线和天线罩组成。GPS接收机和电池放置在舱体内,设有电池组安装架,接收机安装在电池组的上部,用可拆卸的卡扣固定。采用的GPS接收机的精度为5 mm+1 ppm(1 ppm=10-6),满足高度计海面高度定标精度要求。
2.2 浮标工作原理
浮标安装正常工作后,GPS接收机通过扼流圈天线接收天上GPS卫星实时数据,并将GPS原始观测数据保存在存储器中,用于与地面GPS基准站数据进行事后差分处理,得到GPS浮标高精度的定位信息,通过计算GPS浮标瞬时位移,解算出GPS浮标所在位置的瞬时海面高度值。
3 GPS浮标设计
3.1 GPS浮标需求分析
GPS浮标的设计应以服务海上海面高度测量为目的,因此浮标性能要求包括测高精度需求、外形设计需求、GPS天线设计需求、连续供电需求、配重需求、材料需求、密封需求、安全需求以及海上布放便利需求9项需求。总的需求可以总结如下。
1)浮标大小和形状设计应满足:动态稳定、足够的舱体内置设备空间以及易于部署和回收;GPS天线相位中心相对海平面高度差易于测量。
2)GPS浮标天线采用标配有天线罩的扼流圈天线(抑制多路径效应)。
3)浮标舱体足够大,可以安装电池和接收机,电池具备持续供电5天以上的能力。
4)浮标舱体密封良好,保证GPS正常工作。
5)浮标上需加入安全警示灯,保证晚上仪器布放安全。
6)配重固定在浮标底部中央位置,可调节质量,方便不同海况下使用。
7)浮标在侧面和底部同时有系缆点,方便不同的浮标布放形式。
8)浮标材料应坚固耐撞击,能够适应海上恶劣工作环境。
3.2 GPS浮标外型设计
根据GPS浮标需求分析,GPS浮标依靠浮标上固定的GPS接收机对海面高度计进行测量,要求具有良好的稳定性和随波性。浮体结构参考Watson等在澳大利亚Bass海峡高度计定标场中采用的MKⅡ浮标样式结构(见图1)。浮标分为三角架泡沫浮球和仪器舱两部分,仪器舱内固定蓄电池和GPS数据采集器,GPS天线通过螺纹连接固定于仪器舱盖上。
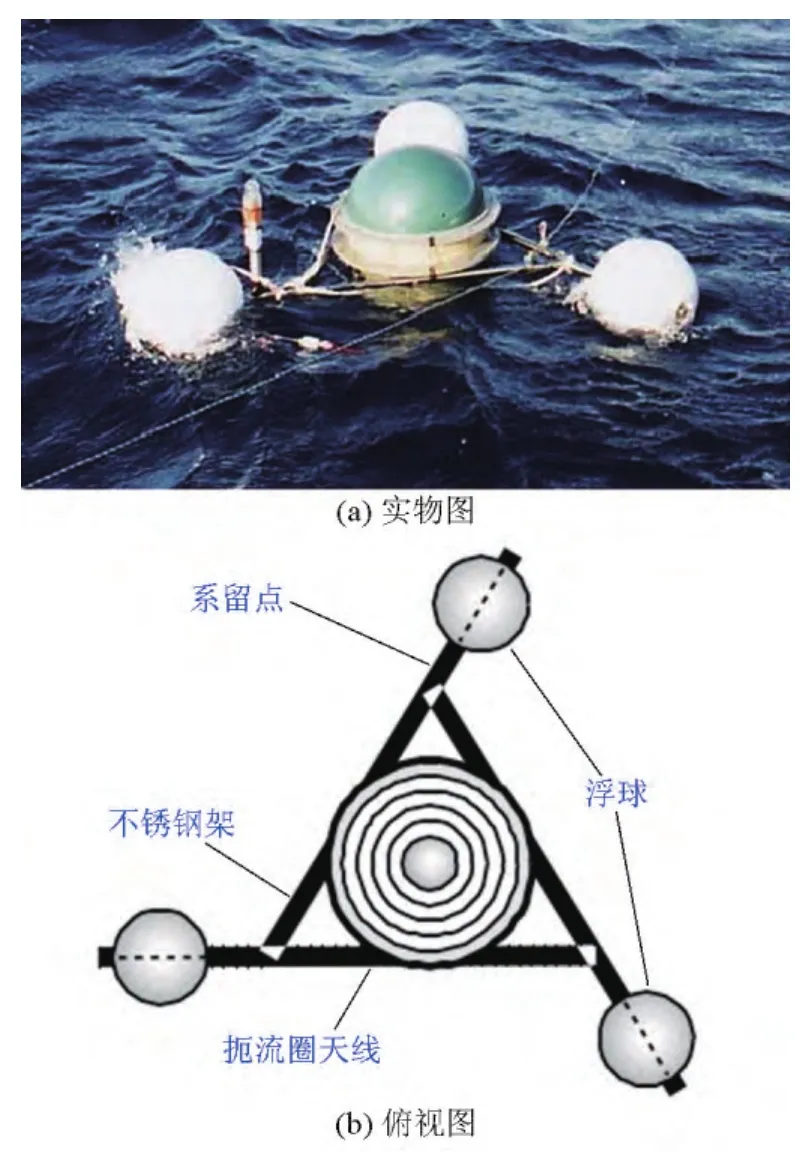
图1 MKⅡ浮标样式[6]Fig.1 MKⅡbuoy style[6]
主要技术参数:浮球中心径为1200 mm,浮球直径为366 mm,总高度为600 mm;浮标体排水量≤72 kg;横摇角≤15°。
三点浮球型浮标有良好的随波性,在海洋环境中可靠性高,不易倾覆。浮体仪器舱采用不锈钢壳体,结构件外表面喷涂防锈漆。
3.3 GPS浮标舱体设计
仪器舱为直径350 mm、深300 mm的不锈钢圆筒结构。仪器舱舱盖即GPS天线的安装板,主要用于固定GPS天线和数据线进舱,采用端面密封。仪器舱内部设有电池固定装置,用来放置蓄电池组,同时充当配重,降低浮标重心;电池组上安装GPS数据采集器,GPS数据采集器通过卡扣固定,方便拆装以便对数据采集器进行检测和设置等工作;仪器舱底部设有配重固定孔和锚系系留点,可以根据需要增加配重或配置锚系系统;仪器舱与浮球支架通过筒体上沿的连接孔利用螺杆组件连接固定。
3.4 GPS浮标密封性设计
GPS浮标主要用于海洋环境,浮标仪器舱盖上部连接GPS天线,舱内安装蓄电池组和数据采集器,密封性能是关键问题。
GPS扼流圈天线通过螺纹固定于舱盖,并用密封圈密封。仪器舱盖预留天线数据线进线孔,设有硫化螺栓,预先将天线数据线置于硫化槽内进行硫化,同时设有螺纹引导数据线进舱固定,硫化螺栓上有密封槽结构,解决了密封问题。仪器舱盖与舱体的密封采用O型密封圈端面密封,并通过螺栓组件紧固,保证蓄电池供电和GPS数据采集器正常运行。
3.5 GPS浮标供电设计
浮标供电采用内置蓄电池的方法,既解决了供电问题,又增加了配重,提高了浮标的稳定性。根据GPS接收机的供电要求选用两块12 V、24 A·h、重7.9 kg的蓄电池。电池直接与GPS接收机连接,并密封在舱体中,保证连接的安全性和稳定性。
4 数值模拟试验
作为浮标设计的重要环节,浮标运动特性分析不可忽略,而波浪作用力中流体粘性的影响相对较小,因此采用不考虑粘性的势流理论解决问题,提高计算效率。这种方法在海洋工程数值计算中有着广泛应用,并为试验结果所验证。
浮标的主要设计参数见表1,依据此表建立浮标水动力数值仿真模型。建模时,为保证网格质量,去掉了不必要的结构细节,如图2所示。

表1 浮标模拟计算参数Table 1 Simulation parameters of buoy
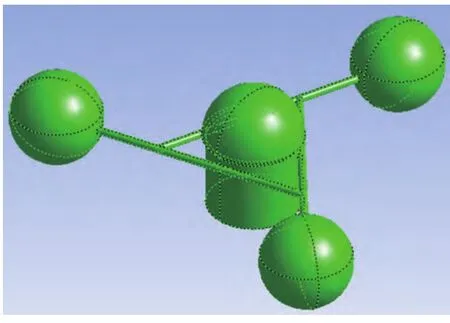
图2 浮标水动力数值仿真模型Fig.2 Buoy model for hydrodynamic numerical simulation
浮标的数值仿真计算采用右手坐标系,坐标原点位于静水平面的浮标中心处,OXY平面与静水平面重合,水流沿X轴,Z轴垂直向上为正。计算时,波浪入射方向选取对浮标横摇影响最大的X轴方向,海况在3级及其以下,波浪周期的范围取1~15 s。计算结果如图3所示。
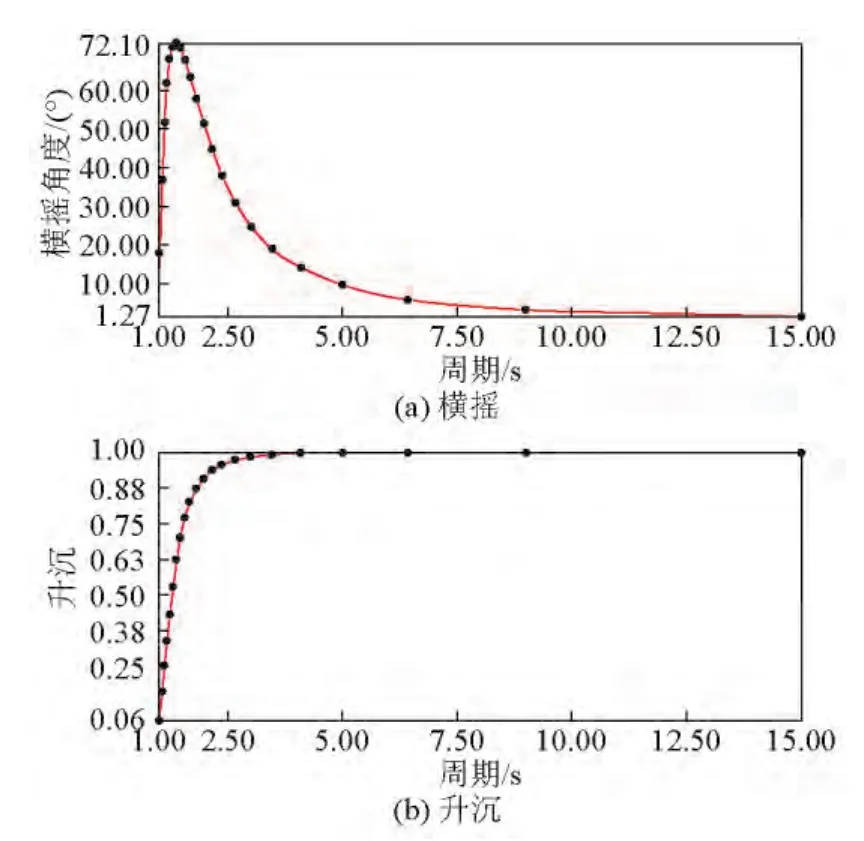
图3 浮标横摇及升沉响应Fig.3 The roll angle and heave rate of buoy with the wave periods
浮标的横摇和升沉是在恢复力的作用下做简谐运动而产生。当入射波的频率和浮标的固有频率相同时,浮标运动与波浪运动产生共振,从而在这个频率处横摇的运动幅值会达到一个极值;当入射波频率与浮标的固有频率不同时,共振也会随之消失。由图3a可见,浮标的横摇响应峰值对应1.36 s的波周期,我国沿海海域波浪周期一般在3~25 s,因此该浮标可避开共振周期。对于浮标的随波性,由图3b可见,当波浪周期大于5 s时,响应值接近1,这说明浮标在波浪中的升沉值与波高值接近相等,浮标能更好地随波运动。
通过模拟计算,设计的测高浮标在主要的波浪周期5 s的最大横摇角度约为10°,升沉响应约为1,满足浮标横摇角≤15°的设计要求;浮标的升沉值与波高值接近相等,表明浮标有很好的随波性。
5 结语
GPS浮标是卫星高度计海面高度定标的主要测量仪器。本文详细介绍了GPS浮标的外型设计、舱体设计、密封性设计和供电设计,并采用数值模拟的形式对设计的GPS浮标进行随波性和横摇升沉响应计算。模拟计算结果表明,设计的GPS浮标可以满足海上定标试验的要求,其随波性和横摇角满足高度计海面高度定标的需要。可以根据本文的设计方案,开展可用于高度计海面高度定标的GPS浮标的研制工作。
[1]徐允鹤.基于GPS和北斗导航技术的靶船遥测系统设计[D].哈尔滨:哈尔滨工程大学,2009.
[2]陈日高,徐益群,白清波,等.基于连续运行参考站网系统完备性监控设计与实现[J].海洋测绘,2011,31(4):53-55.
[3]Exertier P,Bonnefond P,Laurain O,et al.Absolute altimeter calibration in Corsica[J/OL].AVISO Newsletter,2000,7.http://www.aviso.oceanobs.com/en/newsstand/newsletter/newsletter07/absolute-altimeter-calibration-in-corsica/index.html.
[4]Cheng K,Shum C K,Han C,et al.GPS-buoy water level instrument:Applications for radar altimeter calibration[C]//IAG International Symposium on Gravity Geodesy and Geodynamics.Banff,Alberta,Canada,2000.
[5]Schueler Torben,Hein Guenter W.ENVISAT radar altimeter calibration with high-sea GPS buoys[C]//Proceedings of the 2004 Envisat&ERS Symposium.Salzburg,Austria,2005.
[6]Watson Christopher,Coleman Richard,White Neil,et al.Absolute calibration of TOPEX/Poseidon and Jason-1 using GPS bouy in Bass Strait,Australia[J].Marine Geodesy,2003,26(3/4):285-304.
Design of buoy for the calibration of altimeter sea surface height based on GPS
Chen Chuntao,Yan Longhao,Zhang Xiaoxu,Zhang Qian,Zhai Wanlin,Zhu Jianhua
(National Ocean Technology Center,Tianjin 300112,China)
GPS buoy is an important instrument for the calibration of altimeter sea surface height.This paper introduced the composition and operating principle of GPS buoy,and described in detail the design of shape,cabin,leak-proofness and current supply.Finally,using the numerical simulation,the waver and undulation of GPS buoy were experimented in the 3rd class sea state.The result showed that the GPS buoy designed can meet the challenge of the calibration of altimeter sea surface height on the sea experiment condition.
satellite altimeter;calibration;GPS buoy;numerical simulation
P715.2
A
1009-1742(2014)06-0109-04
2014-04-10
中科院合作项目“海洋高度计定标方法研究”(Y2BZZ6AJ50);海洋公益性行业科研专项(201305032-3)
陈春涛,1980年出生,男,山东烟台市人,博士,工程师,主要从事高度计定标检验及应用研究;E-mail:kuroshiocct@163.com
