飞机除冰车作业臂动力学特性研究
2014-03-14王立文
龚 淼,王立文,吕 永
(1.中国民航大学航空自动化学院,天津 300300;2.中国民航航空地面特种设备研究基地,天津 300300;3.上海飞机制造有限责任公司,上海 200436)
飞机除冰车作业臂动力学特性研究
龚 淼1,2,王立文1,2,吕 永3
(1.中国民航大学航空自动化学院,天津 300300;2.中国民航航空地面特种设备研究基地,天津 300300;3.上海飞机制造有限责任公司,上海 200436)
以国产QYZ5200TCB型飞机除冰车为研究对象,在分析除冰车作业臂的结构和工作原理的基础上,运用Pro/E创建除冰车作业臂虚拟样机,根据样机模型,通过Pro/E与ADAMS两个软件之间的专用接口程序Mechanism/Pro,将除冰车作业臂模型导入到ADAMS中,添加复杂约束和载荷,运用ADAMS进行动力学分析计算,从而实现基于Pro/E和ADAMS的对除冰车作业臂的联合仿真分析,并通过稳定性试验对基于仿真模型的实体作业臂进行检测。结果表明,除冰车作业臂的运动平稳可靠、连续性好且无干涉,仿真分析具有可靠性。为民航相关装备的结构设计和分析提供参考方法。
飞机除冰车;作业臂;Pro/E建模;动力学仿真;ADAMS
飞机除冰车作业臂是飞机除冰车能否满足不同机型除冰作业要求的关键部件。根据飞机除冰车作业的行业标准[1]对除冰车作业臂及调平机构的运动学及安全要求,作业臂和工作平台的设计应满足安全性和稳定性要求,以及操作和控制的平稳性。飞机除冰车作业臂承受载荷较大且工况复杂,由于国产除冰车起步较晚,技术积累较少,因此对作业臂及调平机构进行建模和运动学分析可为国产除冰车作业臂结构设计、损伤预测及维修提供重要依据。
虚拟样机技术[2]以进行机械系统运动学和动力学分析为核心,集成了多刚体系统动力学理论成果、参数化的建模工具、功能强大的后处理模块及可视化界面,极大地提高了仿真分析的效率[3-4]。本文根据Pro/E软件建立装配模型,将三维装配模型导入ADAMS中,利用虚拟样机软件ADAMS中的View模块[5]对零件模型以及装配模型进行动力学分析,验证其设计是否满足要求,并通过试验对基于模型参数的实体作业臂进行检测,验证联合仿真方法的可靠性。本文介绍的基于Pro/E和ADAMS的对飞机除冰车作业臂的联合仿真分析方法和试验数据,可为民航相关装备的设计提供参考。
1 模型建立及数据转换
ADAMS用刚体i的质心笛卡尔坐标和反映刚体方位的欧拉角(或广义欧拉角)作为广义坐标,即qi=采用拉格朗日算子法建立系统运动方程

完整约束方程为

非完整约束方程为
其中:T为系统动能;Q为系统广义坐标阵列;ρ为对应完整约束的拉氏乘子阵列;M为对应于非完整约束的拉氏乘子阵列;q˙为系统广义速度阵列。
在整个分析过程中需要的数学模型由设置好的物理模型生成,刚体的形状和位置均相对于公共的参考坐标系来描述,其位置形状坐标统一为刚体坐标系原点的笛卡尔坐标系的姿态角和坐标,虚拟样机软件ADAMS中采用欧拉角来描述刚体的位姿。
在三维建模软件Pro/E环境下建好模型及装配体,利用Mechanism/Pro接口平台与虚拟样机软件ADAMS进行数据之间的导入[6]。具体操作步骤应按照以下流程:
1)创建模型
采用Pro/E创建单个的零件实体模型;然后在Pro/E装配模块[7]的环境下进行组件之间的装配;最后将装配体模型通过 Mechanism/Pro接口模块导入ADAMS软件中进行动力学仿真分析。将Pro/E软件中的装配体模型另保存为parasolid(*.X-T)格式的副本。该副本文件结构为平整模式;输出的几何结构为壳和实体;坐标系选择Pro/E环境下装配时的主坐标系,此处为缺省状态。将Pro/E软件保存的parasolid(*.X-T)格式的装配体副本文件导入新建的ADAMS/View模块软件中,新建工程名称为donglixuefenxi。
2)定义刚体
把在整个模拟仿真过程中不运动的刚体作为初始条件,定义为动力学仿真分析时的大地。这样其他零部件运动仿真就以此作为参照标准。如果装配体中的其他零部件没有相对于大地的运动,则也可以定义为一个刚体,其连接方式也采用刚体连接。
3)创建约束运动副
各零件之间的运动约束副在Mechanism/Pro模块中创建时,可以根据Pro/E软件中创建的零件几何特征来设置[8-9]。本文所研究的除冰车作业臂机械结构中共有17个运动构件;23个铰接副;2个圆柱副;1个固定副;2个驱动副。
4)创建驱动与载荷
由除冰车作业臂的工作原理与工作方式可以看出,该机械结构中有2个液压缸,可以实现除冰车作业臂的举升和收缩运动。因此,采用2个Translational Joint连接副并且施加2个Motions动力来源作为驱动。根据B级除冰车的行业标准,工作平台额定承载为204 kg。
将三维建模软件Pro/E创建好模型及装配体导入虚拟样机ADAMS软件中。如图1所示,已经在装配好的三维模型上施加了载荷并且创建了相应的运动副和约束副。

图1 ADAMS/View中导入Pro/E的装配体模型Fig.1 Pro/E model imported into ADAMS/View
2 动力学仿真
整个物理模型的建模过程中,动力学分析软件ADAMS根据运动学里模型的初始位置和实际需求的约束副条件对实体几何模型进行装配连接[10],为整个除冰车作业臂动力学的模拟仿真做好准备。在ADAMS软件中,对名为donglixuefenxi的模型各个零件进行材料属性设置,并且定义其材料密度;在ADAMS软件环境下赋予各个零件不同的颜色以便于明显地观察各个零件的运动状态;设置重力加速度g= -9 806.65 mm/s2。添加除冰车作业臂机械结构中各个零件之间的连接运动副类型。如添加下臂与底座之间、下臂与连接件之间、上臂与连接件之间、上臂与工作平台之间以及调平机构各杆件之间采用铰接,可以约束3个移动自由度和2个旋转自由度,也就是可以转动但不能移动;2个液压缸采用圆柱副连接,可以约束3个旋转自由度和2个移动自由度;底座与大地之间采用限制6个自由度的固定副连接,作为基座。其中共计:固定副1个;圆柱副2个;旋转副23个;运动构件17个;驱动2个。
在除冰车作业臂机械结构的上臂和下臂的连接处分别装了动力驱动液压缸。这2个液压缸是用来实现除冰车作业臂的举升和收缩运动。虚拟样机软件ADAMS将动力来源Motion施加在液压缸组件的圆柱副上,数量为2个。分别设置Motion的运动速度函数为

在动力来源Motion的驱动下,除冰车作业臂可以实现举升和收缩运动,作业臂机构中关键考察点如图2所示。在运动过程中,分别对图2中的A、B、C点的速度、位移、角速度、加速度、角加速度进行仿真分析研究。根据软件计算,A、B、C点分别为各个相应零部件的质心。

图2 模拟仿真中作业臂机构关键考察点Fig.2 Key investigating points of working arm in simulation and modeling
3 仿真结果分析
通过在ADAMS/PostProcessor模块中分别对工作平台质心A点、作业臂上臂B点和上下臂之间的连接件C点进行相应的位移、速度和加速度的Measure定义,然后模拟仿真得到下述测量曲线和需要的结果。并对A、B、C点的最大举升高度、最大速度以及加速度的变化进行了详细分析。
其中待测点A点为工作平台在加载之后的质心位置,这个质心点可由ADAMS软件自动获取。重力方向定义为向下,模拟仿真后,A点在纵坐标Y轴的位移、速度和加速度曲线如图3所示。

图3 A点仿真曲线Fig.3 Simulation curves of Point A
由工作平台质心A点的位移曲线图可以看出,除冰车作业臂的工作平台最大举升高度为10 160.752 9 mm(除冰车作业臂自身作业高度去掉除冰车的高度),而初始预计设计目标为10 000 mm。由此可见,除冰车作业臂在最大作业高度上满足初始设计目标要求。在接近运动时间为70 s的时候,作业臂的作业高度几乎没有很大的变化,而作业幅度却在发生变化。由速度曲线图可以看出在时间为36.48 s时,工作平台最大速度为233.436 7 mm/s,此时的最大加速度为0。可以看出36.48 s是个分界点,在这个时间点之前速度越来越大,加速度也是正的加速度,而这个时间点之后正好相反。由加速度曲线也可以看出,当作业臂还没有举升到最大高度时,加速度为正加速度,也就是加快作业臂运动;当作业臂达到最大速度时,加速度逐渐减缓至负的加速度,起到一定的速度减缓作用,防止出现速度冲击现象。仿真曲线显示该除冰车作业臂的工作平台在最大作业高度上满足设计要求;速度平缓,满足除冰车连续作业的要求。所以能够满足初始设计时对其的运动预估。
B点为作业臂上臂质心所在的位置(通过软件ADAMS设置自动捕捉),经过运动仿真,其位移、速度和加速度仿真曲线如图4所示。

图4 B点模拟仿真曲线Fig.4 Simulation curves of Point B
由除冰车作业臂上臂质心B点仿真分析曲线可得到位移曲线、速度曲线和加速度曲线。除冰车作业臂上臂的运动轨迹与工作平台的轨迹走势一致。由位移曲线图可以看出:上臂最大举升高度为7 623.123 8 mm,当t=70s时,上臂在高度上没有明显的变化。当t= 34.16 s时,上臂的运动速度达到了最大值151.074 9 mm/s,此时的最大加速度为0,同理加速度的原理和作业平台的原理一致。由速度曲线可以看出速度的变化比较平缓,没有出现速度巨变的现象,可以有效保证高空作业人员的安全。仿真曲线显示该运动满足除冰车作业臂机械结构初始设计时对其的运动预估。
C点为除冰车作业臂连接件(连接除冰车作业臂的上臂和下臂)质心所在的位置,其位移、速度、加速度仿真曲线如图5所示。
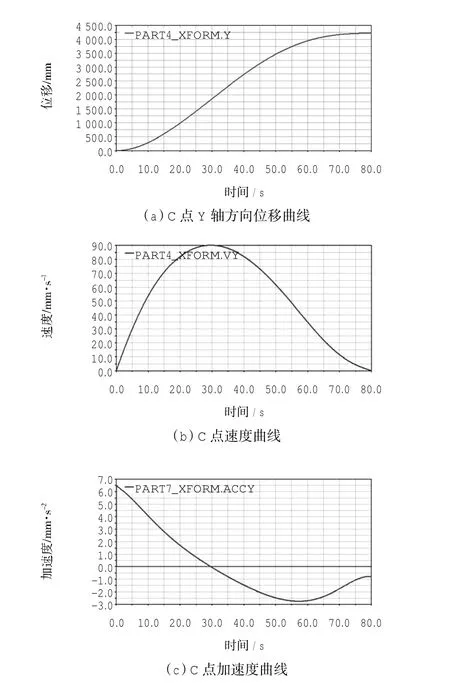
图5 C点仿真曲线Fig.5 Simulation curves of Point C
由图5连接件质心C点的位移曲线、速度曲线和加速度曲线可以看出,除冰车作业臂连接件的运动轨迹比较平稳,中间不会出现过大的波动,整个过程平稳连续,满足除冰车实际作业工况下的要求。当t=70 s时,连接件的最大举升高度为4 215.235 1 mm,当t= 29.52 s时,作业臂的上臂和下臂的连接件的运动速度达到了最大值89.881 8 mm/s,此时的最大加速度为0,但连接件并非处于最大高度。当连接件逐渐趋于最大高度时,速度开始逐渐减小,加速度也为负加速度,以防止连接件发生冲击过程。由仿真曲线可看出,该运动满足除冰车作业臂机械结构初始设计时对其的运动预估计。
4 试验
根据设计和仿真数据,对QYZ5200TCB型飞机除冰车作业臂进行了制造安装,并委托国家工程机械质量监督检验中心进行了试验检测,如图6所示。平台运动时间测量结构如表1所示。

图6 机械臂作业稳定性试验Fig.6 Stability test of working arm
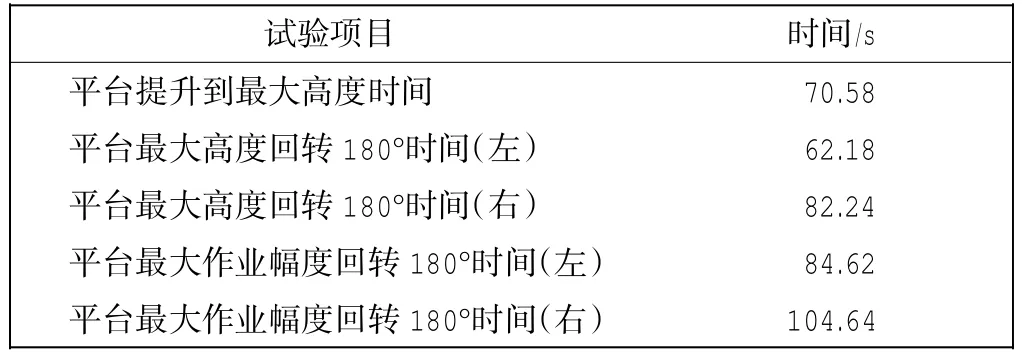
表1 额定载荷(204 kg)高空作业试验Tab.1 Rated load(204 kg)experiment of high altitude work
试验条件为:平台载荷204 kg,以稳定的低速和高速起升、下降至最大作业幅度,在设计值范围内左右回转,起升到最大作业高度,左右回转再下降到行驶状态;并在起升、下降、回转过程中各进行5次正常停止、起动,低速、高速各进行5次。结果显示,机械臂举升到最大高度的时间与仿真结果基本一致,运动中,各机构运行可靠,制动平稳;液压系统无渗漏、无异响,试验中未出现机构或结构有损坏,连接处未出现松动。除冰车作业臂在作业过程中满足设计指标要求,能够实现运动的连续性和平稳性。
5 结语
1)本文以QYZ5200TCB型飞机除冰车为研究对象,运用Pro/E创建除冰车作业臂虚拟样机模型,采用ADAMS进行动力学分析计算,从而实现基于Pro/E和ADAMS的对除冰车作业臂的联合仿真分析。由仿真曲线图可以看出,在除冰车作业臂的设计过程中通过联合仿真方法,可以全面直观地反映模型的作业参数和性能,从而缩短除冰车的研发周期、降低成本。
2)仿真分析和试验检测结果表明,基于仿真参数设计制造的除冰车作业臂,在作业过程中动力学性能满足设计指标要求,能够实现运动的连续性和平稳性。通过对关键点的仿真曲线和数据采集分析,为确定建模仿真方法的正确性和可行性提供了有利的理论依据,也为相关民航设备的结构设计、维护维修提供了参考方法。
[1]GB/T 23417-2009/ISO 11077:1993,自行式飞机除冰防冰车功能要求[S].
[2]童水光,王相兵,钟 崴.基于虚拟样机技术的轴向柱塞泵动态特性分析[J].机械工程学报,2013,49(2):174-182.
[3]史小华,王洪波,孙 利,等.外骨骼型下肢康复机器人结构设计与动力学分析[J].机械工程学报,2014,50(3):41-48.
[4]宋 宇,陈无畏,陈黎卿.基于ADAMS与Matlab的车辆稳定性控制联合仿真研究[J].机械工程学报,2011,47(16):86-92.
[5]顾 林,周永清,陈 勇,等.基于ADAMS的拖拉机空间振动特性仿真研究[J].机械设计,2014,31(1):80-84.
[6]张 朋,欧阳林子.Pro/E、ADAMS和ANSYS之间数据交换方法[J].机床与液压,2010,38(6):110-112.
[7]刘 凡,芮延年,吉绍山.基于Pro/E和ADAMS的步进机构的仿真[J].机械传动,2013(3):40-44.
[8]刘吉成,张学红,刘树林,等.基于ADAMS的机械造穴工具二次开发平台研究[J].机械设计,2011,28(10):41-45.
[9]KONG L F,ZHANG S H.Rigid body dynamics model of the 6-PUS parallel mechanism basedonNewton-Eulermethod[J].Robot,2004,24:395-399.
[10]郁 炜,吕冰海,姚蔚峰,等.基于ADAMS的球体双自转研磨方式下研磨盘转速优化研究[J].中国机械工程,2013,24(7):866-872,881.
(责任编辑:杨媛媛)
Dynamic characteristics research of deicing vehicle working arm
GONG Miao1,2,WANG Li-wen1,2,LÜ Yong3
(1.College of Aeronautical Automation,CAUC,Tianjin 300300,China;2.Aviation Special Ground Equipment Research Base,CAAC,Tianjin 300300,China;3.Shanghai Aircraft Manufacturing Co.,Ltd.,Shanghai 200436,China)
Taking QYZ5200TCB aircraft deicing vehicle as research object,a virtual model of deicing vehicle working arm is created with Pro/E by analyzing the structure and working principle of which.Then the virtual model is imported into ADAMS by Mechanism/Pro.The dynamics analysis and calculation are conducted with ADAMS by adding complex constraint and load,realizing Pro/E and ADAMS co-simulation and analysis of deicing vehicle working arm.A stability experiment is carried out to test the real working arm which is manufactured according to the simulation model.Results show that the motion of deicing vehicle working arm is stable and reliable with good continuity and no interference,proving that the simulation and analysis are reliable and offering reference to structure design and analysis of related civil aviation equipments.
deicing vehicle;working arm;Pro/E modeling;dynamics simulation;ADAMS
V351.392;TH6
:A
:1674-5590(2014)05-0022-05
2014-06-01;
:2014-06-24
:国家科技支撑计划项目(2012BAG04B02);中央高校基本科研业务费专项(3122014D020)
龚 淼(1982—),男,辽宁建昌人,助理研究员,博士研究生,研究方向为民航特种装备与系统.
