基于测量工具的U型水平井井身剖面设计
2014-03-11席宝滨高德利
席宝滨 高德利
(中国石油大学石油工程教育部重点实验室,北京 102249)
基于测量工具的U型水平井井身剖面设计
席宝滨 高德利
(中国石油大学石油工程教育部重点实验室,北京 102249)
为实现2口水平井的精确连通,引入了磁场测距导向工具,开展了U型水平井井身剖面设计方法研究。在对井眼轨迹不确定性分析过程中,引入了合成误差圆。通过对比合成误差圆直径与磁场测距导向工具测距范围的大小,得到2种磁场测距导向工具的使用时机。根据磁场测距导向工具的选择使用情况以及测量特点,设计了相应的井身剖面。额外延伸部分为剖面设计的关键所在,根据测距范围给出了其精确的计算公式。通过实例验证可以看出此剖面设计是合理的。U型水平井的井身剖面设计体现了钻井设计与控制一体化,对今后的深入研究和实践具有参考意义。
U型井;水平井;连通;测距导向;剖面设计;不确定性
U型井技术就是采用定向钻探技术和水平井钻井技术,使地面相距数百米的两井或多井,在地下数百米甚至数千米的目的层处定向对接连通。主要用于盐矿开采、煤层地下气化开采、石油和天然气开采、煤层气开采、地热开采、管道和隧道河底穿越等领域,潜在的应用领域为天然气水合物和铀矿的开发等[1-3]。U型水平井指的是2口水平井在地下进行精确连通。
由于U型水平井技术还处在研究初期,所以在剖面设计时,首先是确保两井成功的对接连通并且顺利的完成这个工程,其次才是确保轨迹最短或者摩阻扭矩最小[4]。要想达到2口水平井在地下的精确连通,测量工具是必不可少的一个手段。但是传统的测量工具MWD由于测量精度及其滞后性、连通靶点不确定性和轨迹的测量计算误差等使得其不能满足两井精确连通的需要。故在最后的精确连通阶段引入磁场测距导向工具来实现2口水平井的水力和机械连通[5]。但是使用哪种磁场测距导向工具、何时使用和如何设计井身剖面,这一系列问题国内外文献都未给出明确解答。笔者在分析由传统测量工具MWD的积累误差产生的井底不确定性和磁场测距导向工具测量原理的基础上,优选了U型水平井的磁场测距导向工具,给出其最佳使用时机,最后提出合理实用的U型水平井井身剖面设计方案。
1 磁场测距导向工具
目前,磁场测距导向工具主要有电磁引导工具(Magnetic Guidance Tool, 简称MGT)、单电缆引导工具(Single Wire Guidance Tool, 简称SWG)和旋转磁场测距导向系统(Rotating Magnet Ranging System,简称RMRS)。3种磁场测距导向工具在邻井防碰、救援井、丛式井、双水平井和连通井等中得到了广泛应用,并取得了显著效益。MGT主要应用在蒸汽辅助重力泄油(SAGD)中,其在世界上第1口U型水平井的磁场测距导作业中效果较好[5],但由于其测距范围和本身的结构限制了MGT在U型水平井中的应用。相比而言,SWG和RMRS更加的适合于U型水平井[6]。
1.1 旋转磁场测距导向系统
旋转磁场测距导向系统主要由磁短节、探管和测距导向计算方法等组成,可以随钻探测邻井距离,精确实现复杂结构井导向钻井控制的目标[7]。旋转磁场测距导向系统用于U型水平井中的工作示意图见图1。磁短节是由横向排列的多个永磁体安装在无磁钻铤内组成,紧跟在钻头后,与钻具一同旋转产生的交变磁场是旋转磁场测距导向系统的信号源。探管主要包括三轴磁通门传感器、三轴加速度传感器和三轴交变磁场传感器,其主要作用是探测井下探管在已钻井中的自身摆放姿态和由旋转磁短节产生的交变磁场[8]。根据地面接收到的磁信号数据,利用测距导向计算方法可以精确计算钻头到对接点的相对位置,钻井工程师可以不断调整正钻井轨道以实现2口水平井的精确连通。RMRS测量精度为5%,最大测距范围为70 m。

图1 RMRS在U型水平井中的工作示意图
1.2 单电缆引导工具
单电缆引导工具主要由产生磁场的测井用单芯电缆和接收磁信号的传感器组(MWD的一部分)组成,如图2所示。电缆末端接1个电极放入已钻井,如果已钻井是套管完井,那么电极与套管接触;如果已钻井是裸眼完井,那么电极直接与井壁接触。电缆内通入已知电流强度(几十安培)的低频交变电流(1~30 Hz)或直流,则根据安培环路定律在电缆周围产生一定磁场强度的磁场,由MWD内的三轴电磁传感器组探测得到该磁场强度的三轴分量[9]。

图2 单电缆引导工具工作示意图
MGT和RMRS中磁源产生的磁场强度与距离成反比,衰减速度很快。而SWG中电流产生的磁场强度与距离 成反比,衰减较慢,故其测距范围大的多。SWG最大测距范围为220 m。当正钻井与电缆轴线垂直时,SWG测量精度为2%;当正钻井与电缆轴线平行时,SWG测量精度为30%。SWG平均测量精度为5%[6,10]。
2 井眼轨迹不确定性
两口水平井在精确连通前钻进和控制与常规水平井一样,但无论如何精确控制井眼轨迹,都存在井眼轨迹测量的不确定性问题。有文献详细的讨论了这个问题,并通过误差椭球(圆)对其进行了直观描述[11-13]。在U型水平井的精确连通过程中引入井眼轨迹的误差椭球,以此来指导U型水平井磁场测距导向工具的选择和井身剖面的设计。2口水平井的误差椭圆柱如图3所示,当误差椭圆开始重叠时,就需要引入磁场测距导向工具来引导正钻井的钻进,以达到及时调整井眼轨迹、实现精确连通的目的。

图3 井眼轨迹不确定性
由于2口水平井的钻井设备和测量工具基本一致,那么井眼轨迹的误差椭圆柱也基本一致。为了方便描述,在一定的范围内,可将2口水平井的误差椭圆柱进行合并,组成合成误差圆柱,如图4所示。合成误差圆的半径为2口水平井上参考点和扫描点(最近距离扫描)所在位置的误差椭圆长半轴之和。
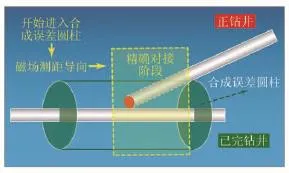
图4 合成误差圆柱
3 磁场测距导向工具的选择
通过合成误差圆来指导磁场测距导向工具的选择。磁场测距导向工具选择的判别模型如图5所示。
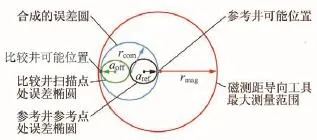
图5 磁场测距导向工具选择的判别模型
图中,aref为参考点处误差椭圆长半轴,m;aoff为扫描点处误差椭圆长半轴,m;rcom为合成误差圆半径,rcom=aref+aoff,m;rmag为磁场测距导向工具最大测距范围,包括旋转磁场测距导向系统最大测距范围rRMRS和单电缆引导工具最大测距范围rSWG,m。
判别如下:(1)当2rcom≤rRMRS时,选择只使用旋转磁场测距导向系统RMRS;(2)当2rcom>rRMRS时,选择使用单电缆引导工具SWG+旋转磁场测距导向系统RMRS。引入最近距离扫描,其扫描半径为rnst。当rRMRS<rnst+rcom<rSWG时,开始使用SWG;随着两井的靠近,当rnst+rcom≤rRMRS时,开始使用RMRS[10]。
4 井身剖面的设计
要实现精确连通的2口水平井都设计成相似的双增剖面,中间稳斜段起到调整的作用[1]。
4.1 只使用旋转磁场测距导向系统RMRS的情况
只使用RMRS情况下的U型水平井井身剖面图如图6所示,井身剖面设计在二维平面内,在t2点精确连通。设计2口水平井重叠部分Soli的目的是为了确保正钻井底部钻具组合进入已完钻水平井中,建立起光滑井眼。设计第1口井额外延伸部分Sext的目的是为了更好地利用RMRS来引导第1口水平井的钻井从而实现2口水平井的精确连通。2口水平井的剖面计算与常规水平井相同,不再赘述。额外延伸部分Sext的计算如图7(a)所示,计算公式为

开始使用RMRS时正钻井的井斜角为

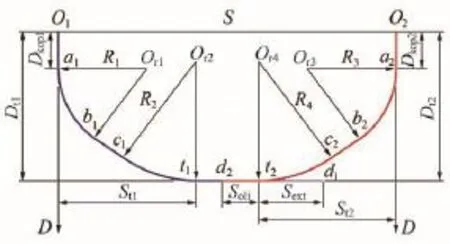
图6 只使用RMRS情况下的井身剖面图

图7 Sext计算方法
4.2 使用SWG+RMRS的情况
根据SWG的测量特点,井身剖面如图8所示。井身剖面与只使用RMRS情况下的相似,只改变了第1口水平井的额外延伸段。额外延伸段由水平段改为了降斜段,以适合SWG的测量。

图8 使用SWG+RMRS情况下的井身剖面图
额外延伸部分Sext的计算如图7(b)所示。由余弦定理得

额外延伸部分

开始使用SWG时正钻井的井斜角为

5 实例验证
以文献[5]中数据进行验证。该井由电磁引导工具(MGT)引导完成连通。根据MGT测量特点,得知只使用MGT时的剖面设计与计算和只使用RMRS的情况相同,所以可以用此文献中的数据对只使用RMRS的情况进行讨论。
正钻井造斜率为11.6 (°)/30 m;根据计算在连通点附近2口水平井的合成误差圆半径为5 m;MGT测距范围为25 m。
由公式(1)计算得额外延伸部分为30.6 m;由公式(2)计算得开始使用磁场测距导向工具时正钻井的井斜角为68°。为了更好地引导连通水平段长度多设计了30 m,开始使用磁场测距导向工具时正钻井的井斜为68°。
通过对比发现,额外延伸部分在本设计中的计算值和文献中给出的值相一致。而本设计中计算出的开始使用磁场测距导向工具时正钻井的井斜角的值比文献中给出的大8°,分析其原因是提前使用了磁场测距导向工具,从而有充足的时间为后面的磁场测距导向做准备。
6 结论
(1) 2口水平井连通过程中,要依靠磁场测距导向工具的精确引导。在只使用SWG和RMRS时,U型水平井的井身剖面设计和计算是相同的。由于旋转磁场测距导向系统(RMRS)的近钻头测量和单电缆引导工具(SWG)的大范围测距,使得其成为U型水平井首选的2种磁场测距导向工具。
(2) 通过井眼位置的不确定性分析来指导磁场测距导向工具的选择使用。当合成误差圆直径在RMRS测距范围内,只使用RMRS;若超出范围,则先使用SWG再使用RMRS。
(3) 针对2种不同的情况,进行了相应的井身剖面设计,明确给出了额外延伸部分的计算公式,通过实例讨论证明了设计的正确性。实现了U型水平井钻井轨迹设计与控制一体化,对今后的深入研究和实践具有参考意义。
[1]高德利, 吴晓东, 李根生, 等.复杂结构井优化设计与钻完井控制技术[M].山东东营:中国石油大学出版社, 2011:1-14.
[2]李子丰, 戴江.对接水平井及其井间导航轨道控制技术[J].天然气工业, 2008, 28(2):70-72.
[3]鲜保安, 夏柏如, 张义, 等.煤层气U型井钻井采气技术研究[J].石油钻采工艺, 2010, 32(4):91-95.
[4]POLONI R, SASSI G, VALENTE P, et al.An innovative approach to heat heavy oil formations by means of two horizontally interconnected wells [R].SPE 133129, 2010.
[5]LEE D, BRANDAO F.U-tube wells - connecting horizontal wells end to end case study:Installation and well construction of the world's first u-tube well [R].SPE/IADC 92685, 2005.
[6]GRILLS T L.Magnetic ranging technologies for drilling steam assisted gravity drainage well pairs and unique well geometries-a comparison of technologies [R].SPE 79005, 2002.
[7]刁斌斌, 高德利, 吴志永.磁短节等效磁矩的测量[J].石油钻采工艺, 2011, 33(5):42-45.
[8]刁斌斌, 高德利, 吴志永.双水平井导向钻井磁测距计算方法[J].中国石油大学学报:自然科学版, 2011,35(6):71-75.
[9]MALLARY C R, WILLIAMSON H S, PITZER R, et al.Collision avoidance using a single wire magnetic ranging technique at milne point, alaska [R].IADC/SPE 39389, 1998.
[10]AL-KHODHORI S M, HOLWEG P, ALRIYAMI H.Connector conductor wells technology in brunei shell petroleum-achieving high profitability through multiwell bores and downhole connections [R].IADC/SPE 111441, 2008.
[11]WILLIAMSON H S.Accuracy prediction for directional measurement while drilling [J].SPE Drilling &Completion, 2000, 15(4):221-233.
[12]WOLFF C J M, DE WARDT J P.Borehole position uncertainty - analysis of measuring methods and derivation of systematic error model [J].Journal of Petroleum Technology, 1981, 33(12):2338-2350.
[13]董本京, 高德利, 柳贡慧.井眼轨迹不确定性分析方法的探讨[J].天然气工业, 1999, 19(4):72-76.
(修改稿收到日期 2014-08-20)
〔编辑 薛改珍〕
Profile design of U-shaped horizontal well based on measuring tools
XI Baobin, GAO Deli
(MOE Key Laboratory of Petroleum Engineering,China University of Petroleum,Beijing102249,China)
In order to realize accurate connection of two horizontal wells, a magnetic field ranging steering tool was introduced, and research was conducted on the design of U-shaped horizontal wellbore profile.While conducting uncertainty analysis of wellbore trajectory, a composite error circle was introduced.By comparing the diameter of the composite error circle with the ranging size of the magnetic field ranging steering tool, the timings for using two magnetic ranging steering tools were obtained.Based on the selection and use of the magnetic ranging steering tool and measuring characteristics, the relevant wellbore profile was designed.The additionally extended part was the key part in profile design, and its accurate calculation equation was given by the ranging size.Example verification shows that this profile design is reasonable.The U-shaped horizontal well profile design reflects the integration of drilling design with control, providing reference significance for further study and practice in the future.
U-shaped well;horizontal well;connection;ranging steering;profile design;uncertainty
席宝滨,高德利.基于测量工具的U型水平井井身剖面设计[J].石油钻采工艺,2014,36(6):7-10.
TE243
:A
1000–7393(2014) 06–0007–04
10.13639/j.odpt.2014.06.002
国家科技重大专项“复杂结构井优化设计与控制关键技术”(编号:2011ZX05009-005),国家自然科学基金委创新研究群体(编号:51221003),国家自然科学石油化工联合基金“页岩气钻探中的井壁稳定及高效钻完井基础研究”(编号:U1262201)。
席宝滨,1984年生。中国石油大学(北京)油气井工程专业在读博士研究生,现主要从事油气井力学与控制工程方面的研究。电话:18810524500。E-mail:wdxizi@163.com。
