进近雷达管制冲突调配专家系统研究
2014-03-08郭肖鹏
刘 然,郭肖鹏
(1.中国民航大学 安全科学与工程学院,天津 300300;2.天津中德职业技术学院 航空航天与汽车学院,天津 300350)
空中交通管制的实施是为了加速并保持空中交通流量以及防止航空器与航空器的相撞[1]。空中交通管制服务包括区域管制服务、进近管制服务和机场管制服务。进近管制区是连接区域管制区和塔台管制区之间的空域,该区域内管制的特点是飞行密度高、潜在冲突多、调配难度大[2]。繁忙的进近管制区管制员工作量繁重,常常超出其能力范围,该区域是飞行事故和事故征候的多发地带。
专家系统是人工智能和数据库技术相结合的产物,能够高效、准确、迅速地工作[3]。雷达管制调配方法是解决终端区内飞行冲突的重要手段,构建以雷达管制方法为知识的知识库,并通过知识推理获得调配决策方案,实现自动化的决策支持,为实际空中交通管制工作提供参考和帮助,可有效地辅助指挥方案的实施,降低管制员的工作负荷。本文的研究重点是设计并开发一套进近雷达管制冲突调配专家系统,提高管制工作的自动化程度。
1 进近雷达管制概述
进近雷达管制是指空中交通管制员利用雷达系统对航空器实施雷达监视、进行雷达引导、提供雷达间隔和提供雷达情报服务及告警服务的一种方法[4]。进近雷达管制调配飞行冲突的主要方法是调整飞行状态和雷达引导。调整飞行状态的主要方式是调整航空器速度;雷达引导方法是管制员指挥航空器机动飞行以避让冲突。
通常,进近航线为机场起落航线中的以下部分:三边(downwind leg)、三转弯、四边(base leg)、四转弯、五边(final),如图1所示。进近航线是机场起落航线的一部分,根据飞行管制职责,当有多架航空器在航线及其附近区域飞行时,管制员应通过调整航空器之间的间隔,消除航线上的飞行冲突,保证航班流的正常着陆次序和飞行安全。

图1 进近航线定义Fig.1 Definition of final approach
2 系统总体设计
2.1 系统组成
当进近管制区内发生飞行冲突时,需要管制员基于冲突态势和管制规则,使用有效的管制方法对发生飞行冲突的航空器进行调配,保证运行安全。在繁忙的进近管制区中使用专家系统,可以辅助管制员快速、准确地选择调配方法,引导航空器解脱冲突,同时可以减少管制能力偏差等人为因素对飞行安全的影响。一个完整的进近雷达管制冲突调配专家系统的组成与一般专家系统的组成是一致的,知识库、综合数据库、推理机是系统的3个基本功能模块,系统组成如图2所示。
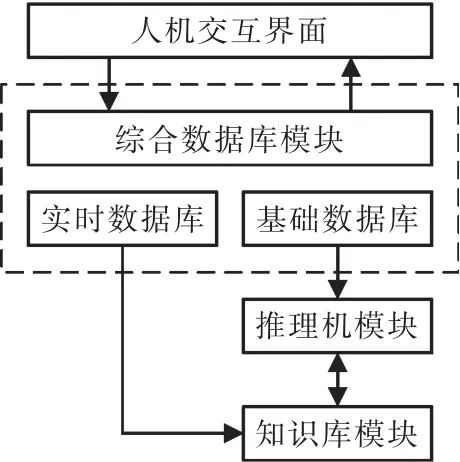
图2 系统组成结构Fig.2 Structure of system
2.2 数据库内容
综合数据库模块为系统数据库,用于存储系统运行所需的全部数据。综合数据库中实时子数据库主要存储实时的航班信息等动态数据;基础子数据库主要存储航空器机型性能数据以及机场空域信息等基础数据。
2.3 系统设定条件
·进近航线上仅有2架航空器发生冲突;
·后机速度大于前机速度,即发生追赶;
·前机因距离跑道较近,应减少机动操作,故后机为规则结果的行为执行者;
·因进近航线飞行高度较低,设定航空器对飞行高度相同,即不做高度调整。
3 知识库设计
3.1 知识库内容
知识库用于存储进近雷达管制调配方法相关知识,包括《中国民用航空空中交通管理规则》等规章标准以及实际工作中的经验方法。建立知识库过程中最重要的是与经验丰富的管制员进行沟通,他们丰富的实践经验是重要的知识,可以对知识库中的内容进行补充、提出建议,管制员不仅是专家,也是用户。
3.2 知识表示与储存
系统采用产生式规则表示法表示调配方法知识。一条产生式规则是一条“IF(某情形存在)THEN(某规则可取)”的语句投影,其一般形式为R*:IF RLS THEN RRS。当RLS为真时,RRS为可使用的规则。R*为产生式规则在规则库中的序号,RLS可以是任何子句的逻辑组合,但RRS只是一个结论或操作,或是多个结论或操作的组合[5]。
本文设计知识库中有如下8条规则:
R1:IF A机三边上 AND B机三边上 AND B机C类 AND VB<240 km/h THEN B机盘旋
R2:IF A机三边上 AND B机三边上 AND B机C类 AND VB>240 km/h THEN B机折线飞
R3:IF A机三边上 AND B机三边上 AND B机D类 AND VB<310 km/h THEN B机折线飞
R4:IF A机三边上 AND B机三边上 AND B机 D类 AND VB>310 km/h THEN B机减速 40 km/h
R5:IF A机五边AND B机三边上 THEN B机延长三边
R6:IF A机五边上 AND B机五边上 AND VB<240 km/h THEN B机盘旋;
R7:IF A机五边上 AND B机五边上 AND VB>240 km/h THEN B机折现飞;
R8:IF A机五边上AND B机转入五边 THEN B机长五边。
图是由顶点集合和顶点间的二元关系集合组成的数据结构,通常可以用G=(V,E)来表示。其中有限非空集合V表示顶点集合,E表示边的集合[6]。
本文采用与或图来表示知识库的结构并对其进行分析,如图3所示。
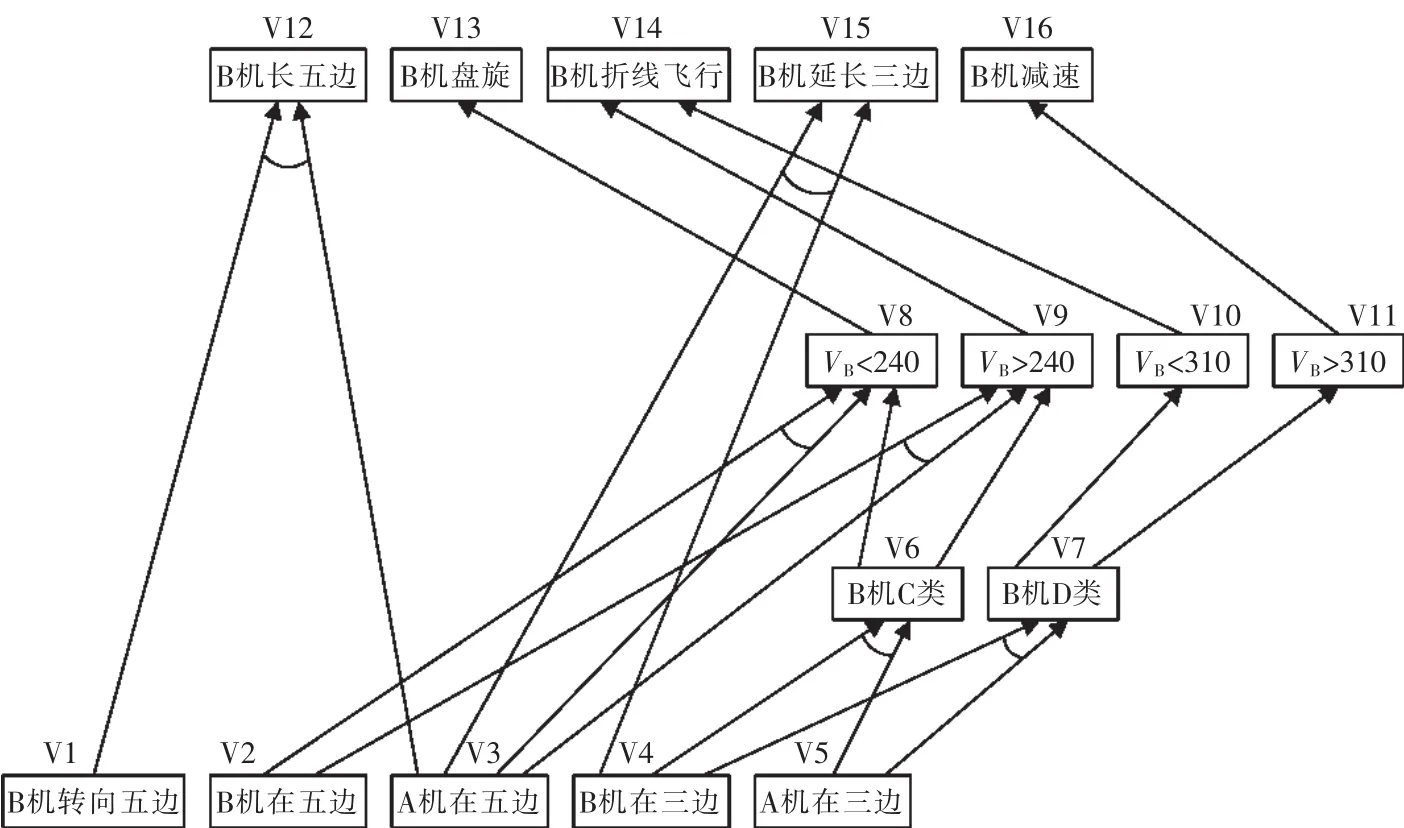
图3 知识库的与或图表示Fig.3 And/or graph of rule base
4 推理机的开发
针对管制调配方法知识的不完备特点,本文采用图论中路径问题的解决方法实现推理机推理过程。
4.1 图论路径问题理论
定义1 有向图G=(V,E)中,若存在顶点序列Vi0,Vi1,Vi2,…,Vin-1,Vin,使得相关联的有向边<Vi0,Vi1>,<Vi1,Vi2>,…,<Vin-1,Vin>都在 E(G)中,则称顶点Vi0到Vin存在一条路径。
定义2 设有向图G=(V,E),表示各顶点之间关系的矩阵邻接A(G)=ai,j[]n×n是一个n×n的二维数组,其中:

给出一个图的邻接矩阵就等于给出了图的全部信息,可以通过邻接矩阵算出图G中任一点与其他点之间是否有路可通[7],若有路经过哪些节点到达(即2节点的路径)。将知识库的与或图构造成邻接矩阵A,如图4所示。

图4 知识库与或图的邻接矩阵AFig.4 Adjacency matrix A of And/Or graph of rule base
4.2 推理算法
将图的邻接矩阵性质运用于推理机的推理搜索中,将知识库的图模型转化成邻接矩阵,并结合反向推理方式进行推理,实现对知识的推理过程,推理算法为
步骤1 判断给定知识对应与或图的哪些节点。
步骤2 求终点(即推理结果):通过判断知识库有向图的邻接矩阵行的值来判断图的终点。当某一行的值全为0时,该行所对应的节点即为终点。
步骤 3 求路径组,即求 A(G)2,A(G)3,搜索分析 aij(n)=1 的意义,n=2,3。 由于 aij(n)=Σaik(n-1)akj,当且仅当 aik(n-1),akj同时不为 0,即得到给定知识节点 Vi与终点Vjn步可到达的全部路径信息。
步骤4 对路径进行分析:
如果某条路径所有的节点均为给定节点,说明给定的知识充分,推理链完整,该路径终点即为推理结果。如果存在多条这样的路径,对这些路径进行比较,终点出现率最高的即为推理结果。
5 运行仿真
应用可视化编程工具并结合数据库技术开发系统及数据库,建立良好的人机交互界面,编写计算机程序实现推理算法。推理机推理计算过程为
(1)根据图5中航空器信息,判断给定知识对应的节点为 V4,V5,V7,V11;
(2)通过对矩阵的判断,得出第 12、13、14、15、16 行全为 0 元素,所以 V12,V13,V14,V15,V16为终点,这些节点代表的知识为推理结果;
(3)通过计算分析 A、A2、A3的矩阵元素(aij)、(aij)2和(aij)3,得到 V4,V5,V7,V11与所有终点之间的路径有:

(4)分析路径
上述路径组 L1、L2、L3、L4、L5均出现未给出节点V6、V8、V9、V10。 所以,只对 L6、L7路径进行比较,即得出V16,节点代表的知识减速40 km/h为规则结论,推理完成。系统运行界面如图5所示。
6 结语
应用专家系统和数据库技术,构建了进近雷达管制冲突调配专家系统。系统具有准确、快速、方便的特点,避免了由人为因素所导致的决策结果不定性,缩短了管制员的决策周期,实现了决策方案的自动化生成,具有重要的实际参考价值。

图5 系统运行界面Fig.5 Interface of system
[1] 董襄宁,赵征,张洪梅.空中交通管理基础[M].北京:科学出版社,2005:131-133.
[2] 赵嶷飞,刘然,王红勇.基于航线对象的五边进近调配程序模型研究[J].中国民航大学学报,2013,31(3):1-5.
[3] 杨慧,丁建立.人工智能及其在民航中的应用[M].北京:中国民航出版社,2005:14-15.
[4] 杨昌其,王庆春,邹国良.进近雷达管制方法浅析[J].空中交通管理,2003(5):11-14.
[5] 邓超,郭茂祖,王亚东.一种基于产生式规则的不确定推理模板模型的研究[J].计算机工程与应用,2003,39(30):57-61.
[6] 孙惠泉.图论及其应用[M].北京:科学出版社,2004:3-9.
[7] 杨林楠,彭琳.路径问题在专家系统推理机中的提出和解决[J].计算机工程与应用,2007,43(3):214-217. ■
