舵机非线性参数回差测试系统
2014-03-08何平,刘超,李莹,王猛
何 平,刘 超,李 莹,王 猛
(哈尔滨工业大学 航天学院控制科学与工程系,哈尔滨 150001)
随着航空、航天工程的不断深入发展,我国航天领域的科学技术迅猛发展,对现代航天设备的性能提出了更高的要求。其中,舵机系统是各种航天设备中应用最为广泛、最为普遍的控制飞行器运动方向和状态的装置,提高舵机系统的精度与可靠性已成为现今航天领域的重要课题[1]。
在国外,很多著名研究院所、高校和大公司在很多年前就已经开展过很多有关机械传动测试台的研发。国内的机械传动测试平台的研究开始于1980年初期,相比国外起步晚,发展缓慢,有待改进[2]。
本文基于TMS320F2812设计了舵机非线性参数测试系统,对非线性参数回差进行测量。回差是指传动机构在整个范围内,在相同的输入作用下,输出值在上行加载与下行加载之间的差值[3]。该系统利用控制力矩电机、扭矩传感器和角度传感器,在相应的控制算法下,使舵机传动机构按照预定逻辑进行运动,从而实现对舵机非线性参数回差的检测[3]。
1 检测方案
系统的检测方案如图1所示。

图1 系统检测方案示意图Fig.1 Schematic diagram of system detection scheme
系统由操作台、主控电路和力矩加载测试台等组成。如图1所示,该系统能够控制力矩电机,并结合角度传感器和扭矩传感器反馈的实时角位移值和力矩值等数据,在设定的某个算法的作用下,计算出合适的控制量来驱动力矩电机,带动舵机传动机构的输入轴转动,进而使传动机构按照预定的逻辑进行运动,来实现对传动机构非线性参数的测量,对测试的数据进行分析与处理,并且与上位机实时通信[4]。
2 整体框架
系统的整体设计方案如图2所示。
舵机非线性参数测试系统的操作台,即上位机,是整个系统的监控平台,采用工控机实现,为测试系统提供友好的人机交互界面,通过设定参数、测量数据和分析数据,得到传动机构的回差等非线性参数。

图2 整体设计方案结构图Fig.2 Overall design scheme structure diagram
主控系统,即下位机,是整个系统的控制核心,根据用户的给定命令值,结合各传感器反馈的数据,按照设定算法,测量输入轴扭矩传感器、输入轴角度传感器以及输出轴角度传感器的输出值的变化,并将所得数据发送至操作台,由上位机计算得各参数。
力矩加载测试台是系统的机电部分,舵机传动机构被固定在力矩加载测试台上进行各机械参数的测试,力矩电机连接在测试台的输入轴,测试台的终端连接一电磁离合器,用以限制输出部分的运动状态。
3 系统的硬件构成
系统的控制电路结构框图如图3所示。

图3 系统控制电路结构框图Fig.3 Schematic diagram of system control circuit
3.1 系统主控制器单元
系统采用TI公司的TMS320F2812作为主控芯片,它具有强大的数字信号处理能力,片内集成了丰富的外设资源,为舵机传动机构的参数测量提供了极大的便利。考虑芯片的最小系统配置,该单元主要由以下几个模块组成:电源模块、JTAG模块、时钟模块、复位模块、晶振模块等[5]。
3.2 RAM存储器的扩展模块
由于主控芯片内部RAM容量有限,因此本主控系统对F2812进行了RAM存储器的片外扩展。本主控系统采用IS61LV12816作为片外RAM扩展芯片,它是一种高速的静态RAM,有17根地址总线,16根数据总线,其存储空间为128 k×16 bit,由3.3 V电源直接供电,同时兼容TTL与CMOS电平,无时钟或刷新。
3.3 力矩电机驱动模块
为了控制力矩电机按照操作台的命令及相关测试逻辑进行力矩的加载,主控系统设计了一力矩电机驱动模块,力矩电机驱动器选用多功能直流伺服驱动器。
选用TI公司生产的数模转换芯片DAC7731作为本主控系统力矩电机驱动模块的转换单元,DAC7731是一个16位数字模拟转换器,能够提供可配置的电压输出范围,转换速率高,功耗低,特别适合于工业测量与控制领域[6]。
3.4 扭转传感器数据采集模块
为了采集扭矩传感器的测量值,系统设计了一扭矩传感器数据采集模块,采用AD7606作为采集扭矩传感器所测扭矩的电压值的模数转换芯片,它能将扭矩传感器所测的扭矩电压量转换为对应的扭矩数字量,AD7606采用过采样技术,可达到16位精度,同时提高了模数转换精度。
3.5 角度传感器数据采集模块
系统角度传感器的通信接口采用RS422标准,需设置AM26LS32四路互补式接收器,扩展两路RS422接口,将角度传感器发送的RS422标准的差模信号进行转换后发送至F2812主控芯片。
3.6 通信单元
通信单元主要用于控制电路和计算机之间的通信。系统以MAX3232为核心器件设计了RS232通信单元,方便主控系统与操作台进行数据交换。
4 系统的软件实现
系统的控制电路的软件部分运行于TMS320F2812中,软件开发平台为CCS3.3。程序主要以C语言完成[7],其工作流程图如图4所示。
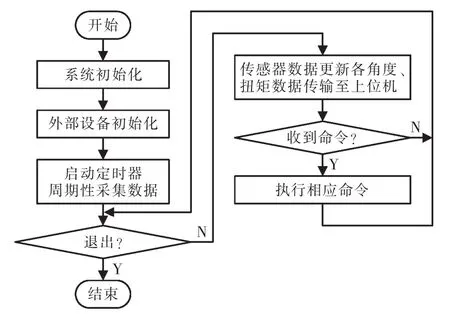
图4 系统流程图Fig.4 Flow chart of the system
回差是指在整个范围内,在相同的输入下,输出值在上行加载与下行加载之间的差值。传动机构的总回差包含传动机构的固有间隙和传动机构的弹性回差[8]。整个传动机构的固有间隙是固定不变的,而传动机构的弹性回差是随输入轴加载扭矩的增大而增大。通常所说的回差是指在额定扭矩下的回差。
在测量舵机传动机构的回差时,本测试系统采用逐次加载法测量,流程图如图5所示。

图5 回差测量过程流程图Fig.5 Flow chart of backlash measurement
5 实验结果
舵机非线性参数测试系统对舵机传动机构进行待测参数回差的测试,测试过程所反馈的参数运用LABVIEW可视化编程软件及其曲线拟合模块进行滤波、拟合等处理,并绘制相应测试结果曲线,如图6所示。
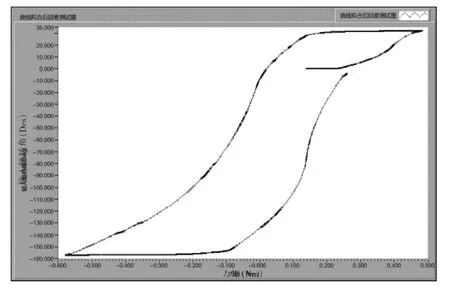
图6 回差测试曲线Fig.6 Testing curve of backlash
6 结语
本文设计的舵机非线性参数回差测试系统,运用DSP技术实现了对回差参数的测量。实验结果表明,该系统能够快速地测量出所需参数,经济实用,操作维修方便,实现了舵机传动机构的自动化检测,具有很高的实用价值,对于航天、航空的研究、发展具有非常重要的意义。
[1] 胡林.高精度舵机控制器的研制[D].西安:西北工业大学,2006:1-2.
[2] 李永亮.基于VC++的新型少齿差滤波驱动机构传动性能实验测试研究[D].重庆:重庆大学,2008.
[3] 朱孝录.齿轮的试验技术与设备丛书[M].北京:机械工业出版社,1988.
[4] 李松.齿轮动态传动误差高精度测试系统设计与分析[D].长沙:中南大学,2011:10-28.
[5] 蒋明桔,秦现生,沈宏华.舵机传动机构静动摩擦力矩测控系统设计[J].测控技术,2009,28(12):44-47.
[6] 高建军,冷岩.传动装置回差的测量与数据处理[J].机电技术,2007(3):38-41.
[7] 孙丽明.TMS320F2812原理及其C语言程序开发[M].北京:清华大学出版社,2008:15-19.
[8] 邢金龙,冯帅将,盛业涛.用于科普展品的机械传动机构开发[J].通用机械,2008(12):12-15.
