水下信息体系发展及运用探讨
2014-03-08宗思光吴荣华张显峰
宗思光,吴荣华,张显峰
(海军工程大学电子工程学院,湖北武汉 430033)
水下信息体系发展及运用探讨
宗思光,吴荣华,张显峰
(海军工程大学电子工程学院,湖北武汉 430033)
水下空间是信息透明差的空间,水下信息作战起步滞后。随着水下潜艇和水中兵器威胁的不断加大,以及水下通信、水下远程预警、信息融合及其他现代化技术的不断提高,水下信息战日渐成熟并将进入现代海战。本文分析外军典型的水下信息网络系统,并对水下信息作战体系框架及AUV在水下信息作战网络的运用特性进行探讨,研究结果有助于推动水下信息体系的发展。
信息系统;信息作战;海网;水声网络
0 引言
信息作战是作战体系、作战行动和指挥控制的一体化。大空间、多方位、精确直达成为信息作战的基本模式。虽然水下空间是信息透明差的空间,水下信息作战起步滞后,但随着水下潜艇和水中兵器威胁的不断加大,以及水下通信、水下远程预警、信息融合及其他现代化技术的不断提高,水下信息战日渐成熟并将进入现代海战。水下信息作战应具备有限支援下的相对独立作战能力、与强敌水下兵力信息对抗的能力、高效作战资源组织运用能力、辅助指挥决策能力和远海信息保障能力。总之,水下信息网路体系作战将传感器、武器、平台和指控系统集成成为巨大网络,将传感器网、信息网、作战网三网合一,可增强信息水下获取、共享和利用信息的能力,满足水下网络化体系作战需求。
传统的水下信息获取主要依靠单个传感器,这种方式的探测效率低,很难满足对大范围、长时间的水下信息获取的需求,通过网络技术将警戒监视海域内多个不同位置布放传感器 (节点)进行互连,各节点间通过可靠的通信手段实现数据的交换、分发和汇聚,采用集中或分布式数据处理实现对网络覆盖范围内目标的探测、定位、跟踪和分类识别等功能,可以形成分布式网络化水下警戒探测系统。分布式网络化水下警戒探测系统具有机动灵活、成本低廉、效费比高等优点,扩大了水下预警的探测范围和持续时间,有效增强了水下战场信息的感知能力。
本文分析外军典型的水下信息网络系统,并对水下信息作战体系框架及水下信息作战网络的运用特性进行探讨,研究结果有助于推动水下信息体系的发展。
1 典型水下信息网络系统
美国是最早提出水下信息网络作战应用的国家。目前,美国正实施多个水下网络发展计划,其中比较典型的有Seaweb(海网)、近海水下持续监视网计划及深海汽笛战术寻呼系统等。
Seaweb是目前规模最大、最成功的在研水下网络项目,由美海军研究办公室 (ONR)、空间与海战系统司令部 (SPAWAR)负责研制 (见图1)。该系统是一种典型的海底水声传感器网络,通过水声通信链路把固定节点、移动节点和网关节点连接成网。系统使用水下遥测声呐的声Modem互连固定和移动节点,并采用先进的组网协议来完成给定的任务,可通过浮标网关与Internet、移动通信网络及卫星网络等实现无缝连接。该网的节点数量已达17个,单个节点空间距离1~5 km,深度50~300 m。固定节点包括可部署传感器节点和水声中继节点。移动节点由潜艇、自主潜航器 (AUV)、蛙人或海底爬行车组成,2004年 Seaweb试验示意图如图2所示。目前,Seaweb-3和Seaweb-4系统已投入应用。
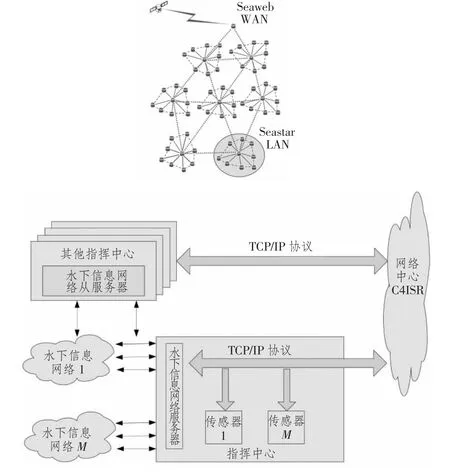
图1 Seaweb原理及网络信息拓扑图Fig.1 Principle of Seaweb acoustic wide-area networks

图2 Seaweb 2004示意图Fig.2 Seaweb 2004 grid postmortem
美国海军自1998年起,平均每2年进行1次海网的海底水声通信试验。多次试验结果证明,在浅海恶劣环境条件下利用水声网络在广阔水域进行高质量数据传输可行。潜艇和水面舰艇利用Seaweb实现水声通信。在Seaweb网络支持下,潜艇子数据链提供给潜艇隐蔽通信的新手段,克服了传统通信手段隐蔽性差的弱点。2003年,水下无人航行器作为Seaweb网络移动节点,累计工作了300 h;由6个重发器节点、2个网关节点组成Seaweb网络,支持与水下无人潜航器的通信与导航。试验证明水下无人潜航器在固定自主水下网络的支持下,可以组成自主的移动舰队 (见图3)。

图3 Seaweb网络与水下无人航行器试验Fig.3 Seaweb network with UUVs
潜艇平台接入水下网络后,能在保持隐蔽性的情况下,利用水声信道,通过网络实现与其他海、陆、空、天及水下平台的网络化信息连接,极大提高反潜作战能力。美国“海豚”级潜艇使用ATM885进行了一系列中继通信试验。据报道,该艇在水深约122 m处航行时,克服了传统通信手段隐蔽性差的弱点,通过浮标网关节点中继,向岸基Internet发送了包含文字、图像、图表和其他信息在内的E-mail报文 (见图4)。尽管 Sublink技术还有待进一步完善,但比潜艇现有的单向低数据率超低频 (ELF)无线通信优越。

图4 利用Seaweb网络实现潜艇对外双向通信Fig.4 Seawebmessage Multi-Access Collision Avoidance(MACA)Internet Protocol(IP)
美国海军在研制Seaweb网过程中,不断试验加入预置的带有移动弹头的武器系统,以提供有效、低成本的作战功能。预置的武器系统由飞机、舰艇或潜艇布防在Seaweb网有效区域内,由Seaweb网络进行指控,形成水下作战网络。采用分布多种传感器探测空中及水下目标,如采用综合浮标探测来自空中直升机、固定翼飞机的威胁,探测信息通过无线水声通信技术传输至水下潜伏式武器平台。在浅水区域,采用潜射导弹对威胁目标进行打击;在深水区域,采用水听器阵列实现对潜艇目标的侦测,并采用鱼雷进行打击,如图5所示。水下传感器网络是对威胁目标进行自主攻击的主要技术支撑。

图5 水下信息体系中水中兵器平台Fig.5 Weapon system in the networked undersea information system
近年来,美国水下信息作战技术的一个重要趋势是注重利用UUV移动节点进行水下分布式组网探测。研究表明在未来水下作战中,为了最大程度地提高潜艇的隐蔽性,潜艇部队将越来越依靠UUV来执行各种任务。潜艇可通过释放UUV对水下目标进行跟踪和攻击;潜艇通过危险海区时,释放UUV诱使敌方反潜装备和潜艇暴露。目前,美国海军正在开发最先进的水下网络——近海水下持续监视网 (Multi-Institution Effort in Persistent Littoral Undersea Surveillance Network,PLUSnet)。PLUSnet是一种半自主控制的海底固+水中机动的网络化设施,由携带半自主传感器的多个UUV组成,这些UUV能相互通信,自行履行多种功能,包括对海洋元素进行取样、监视并预测海洋环境。PLUSnet作战使用及关键设备如图6所示。

图6 PLUSnet作战使用及关键设备示意图Fig.6 PLUSNet concept and subsystem
水下信息体系运用关系到国家海洋和军事战略,对维护领海安全具有重要的军事战略价值。从外军装备体系发展来看,水下信息作战也必将走向网络化信息作战。通过网络化水下信息体系建设,可在相关海域形成对己方相对“透明”的水下战场,为局部水下战场的信息获取、目标识别、作战指挥、武器协同、作战效果评估等构成的作战体系提供水下预警信息支持和保障,以夺取局部水下战场的信息优势,可有效提高水下战略威慑、潜艇作战和反潜战、水下信息对抗等海上联合战略、战役的实战能力。
2 水下信息作战体系框架分析
水下信息作战网络的目的是通过把网络扩展至水下实现水下作战的革命,系统把传感器、网络、指控、平台、武器系统和作战人员集成为网络化的分散布局的作战体系,可灵活应对从海底到空间各种威胁,形成近海水域侦察、警戒、指挥、控制、通信、导航、定位和目标攻击的综合作战系统,还可实现相关海域的高危区域兵器防卫。在水下信息网络系统建设上应遵循的总体设计原则应是简单、有效、可靠、安全。水下信息网络可使用水下遥测声呐的声Modem互连固定和移动节点,并采用先进的组网协议来完成给定的任务,并可通过浮标网关与Internet、移动通信网络及卫星网络等实现无缝连接。
水下信息作战系统是一个跨环境、跨系统、多任务的作战体系,通过通信网关可以和水上空间的信息网络、作战平台、指控系统连接起来,从而实现水下、水面、航天的多任务信息获取、预警和武器攻击。系统应采用灵活机动、快速布防的技术,允许系统与舰船编队遂行作战,在发生冲突的地区,迅速布放水下作战网络,克服浅海地区捕鱼拖网的破坏和其他不安全因素。同时采用自组网和严格的能量管理技术,采取休眠状态和低功耗设计技术来解决能量长期供应问题。
围绕海战场水下作战应用,通过外军典型水下信息网络的发展历程及技术状态分析,可知水下信息体系作战应具有以下能力:
1)全域感知。需具备水声、光学、电场、磁场等多频段的信息侦察能力,同时应具备平时水下战场环境态势信息收集和战时水下侦听、通信、水下无人平台攻击等手段,满足水下全天候、全频域信息感知需求。
2)全程管控。针对复杂水下战场态势的动态变化,需具有相应的资源动态管理和运用能力,实现态势从初始态势朝目标态势的发展,全面掌控水下预警、通信、测控、武器平台攻击作战过程的主动权。
3)多域进攻。针对敌方水下信息系统和作战人员,分别从物理域、信息域和认知域进行进攻作战,取得综合信息优势。
4)多层防护。针对敌方水下平台的信息侦察和信息进攻,需要通过伪装和干扰进行反侦察,同时需要采取多层次多手段的信息防御。
水下信息作战体系主要由基础层、功能层和应用层构成。基础层主要包括水下预警设施、通信网络设施、计算基础设施、时空基准设施、安全保密设施、水文气象设施及能源供给设施等;功能层分为装备功能层和节点功能层。装备功能层主要包括水声侦察、水声对抗设备、光纤光学侦察设备、网络侦察、破袭装备及新概念武器等;节点功能层主要包括潜艇、UUV、浮标、水面舰艇等平台。作战过程中各平台根据需要可以构成信息侦察监视、信息作战指挥、信息作战进攻、信息作战防御等功能节点;应用层主要包括协同侦察、协同信息进攻、协同信息防御、信息作战资源管控等系统。海战场信息作战的基本流程可以描述为:信息侦察及预警——指挥决策——信息引导及指示——协同信息攻防交战——作战效果评估。通过体系自身能力闭环,完成对敌多手段信息作战过程,实现多元作战目标。
3 AUV在水下信息网络中的运用
水下信息网络应根据防御需求、单元作战范围、水深等,设置不同的网络拓扑形式。同时根据水下信息网络布放海域情况,设置网关结构、水下自主武器平台、传感器阵列形式等参数。水下信息网络主体线路为系统提供能源、控制、信息传递等支撑架构。在节点单元,通过各类型传感器,获取水声、光、电、磁、生物、洋流、水温等水下信息。通过水下移动UUV平台、浮标、潜标构成水下GPS系统,实现对水下潜艇、武器平台的导航及通信。水下移动节点、固定节点、浮标、潜标等共同组成水下信息网络对外的通信、指挥控制信息通道。
在水下信息网络系统中通过水下移动AUV平台、浮标、潜标构成的水下GPS系统主要由相关节点智能联网组成,每个浮标上装有GPS或DGPS以及水声换能器,水下载体与浮标间采用低波特率的扩频信号进行通信及定位。系统主要由浮标锚泊系统、主动发射阵、浮标信号处理机、浮标电源及GPS接收系统组成。其中关键部分为浮标锚泊系统、基阵和浮标电源。利用水下信息网络,通过网络节点间接力形式可实现潜艇对外双向隐蔽通信。通过浮标、AUV、潜标形成的水下GPS系统,也可实现水下信息网络中潜艇平台的导航。
由于海洋水下观测在海域受限,完整地描述水下物理场,全方位布置观测传感器,代价极高。对此,可借鉴人造卫星的概念,通过多个AUV分布在水下信息网中的各个部分,各自勘测自己的水域,然后将数据发回信息网节点。采用AUV机动的自主勘测平台和泊具及远距离自动检测装置协调工作,要从动力、通信和整体任务规划及扩展AUV的运行框架。AUV的任务是勘测信息网主体难以覆盖的海域信息,当多条AUV执行任务时,可共用一个带能源的漂浮泊具,这样一来,当AUV能源不足时,可返回漂浮具充电,并把勘测数据传给漂浮具,漂浮具按一定的模式将数据发回控制中心,控制中心也可以向漂浮具发送AUV任务。水下AUV的角色就如同太空中的人造卫星,因此,AUV也可称为水下信息网中的“海洋卫星”。海洋卫星“AUV”也可担当危险水域 (目标)勘测、通信网关节点的功能。
4 结语
随着国家海洋战略的实施,海洋权益日益受到高度重视,水下信息体系运用关系到国家海洋和军事战略,对维护领海安全具有重要的军事战略价值。由于水下信息网络系统是一个跨环境、跨系统、多任务的作战体系,针对不同的战略要害区、战略敏感区、潜在战略作战区的当前和未来复杂水下战场态势,水下信息网络涉及的使命任务、关键技术及作战运用特性差异性很大,水下信息体系涉及的技术、战术及作战运用值得相关学者深入研究。
[1]李汉清,戴修亮.美国海军的水下探测系统[J].潜艇学术研究,2004,22(4):79 -80.
LIHan-qing,DAIXiu-liang.American underwater detection system[J].Submarine Technicality,2004,22(4):79 -80.
[2]邱立军,王文双.水下网络的发展与应用[J].舰船电子工程,2009,29(5):18 -21.QIU Li-jun,WANG Wen-shuang. Development and application of underwater network[J].Ship Electronic Engineering,2009,29(5):18 -21.
[3]EWING D.Janes underwater warfare systems 2011 -2012.23 editions[M].London:Janes Information Group,2011.
[4]SOZER E M,STOJANOVIC M,PROAKIS JG.Underwater acoustic networks[J].IEEE Journal of oceanic Engineering,2000,25(1):72 -83.
[5]RICE JA.Seaweb network for FRONT oceanographic sensors[EB/OL].http://www.onr.navy.mil/sci_tech/ocean/reports/docs/nopp_funded/02/bcbrice2.pdf.
[6]SONICHSEN F.Communication options for underwater scientific networks[J].Sea Technology,2005(5):46 - 50.
[7]JONES M L.Connecting the underwater battlespace[C].UDT Europe,2004.
[8]梁炎.海底网络中心战传感器网络[J].舰船科学技术,2006,28(1):109 -112.
LIANG Yan.Undersea sensor network for network-centric warfare[J].Ship Science and Technology,2006,28(1):109-112.
[9]RICE JA,CREBER R K,FLETCHER C L,BAXLEY PA,et al.Seaweb undersea acoustic nets[C].Biennial Review 2001,TD 3117(August),SSC San Diego,San Diego,CA,2001:234 -250.
[10]SOZER EM,PROAKISJG,RICE JA,et al.Shallow-water acoustic networks[D].Encyclopedia of Telecommunications,John Wiley & Sons,Inc.,New York,NY.2002.
[11]PROAKIS JG,SOZER EM,RICE JA,etal.Shallow water acoustic networks[J].IEEE Communications Magazine,Institute of Electrical and Electronics Engineers,2001,39(11):114-119.
[12]OWEN M W,KLAMER D M,DEAN B.Evolutionary control of an autonomous field[M].Biennial Review,TD 3117(August),SSC San Diego,San Diego,CA,2001:47 -57.
[13]MCDONALD V K,KLAUSEN M B,BRIEST S G,et al.Real-time implementation of a matched-field tracker in an autonomous submerged target trip-wire system[M].Biennial Review,TD 3155(December),SSC San Diego,San Diego,CA,2003:156 -161.
[14]PORTA D,RICE JA,CODIGA D.Acoustic modem multiaccess networking for data acquisition[J].Sea Technology,2001,42(5):10 -14.
[15]RICEJA,FLETCHER C L,CREBER R K,etal.Networked undersea acoustic communications involving a submerged submarine,deployable autonomous distributed sensors,and a radio gateway buoy linked to an ashore command center[C].Proceedings of the Undersea Defence Technology(UDT)Conference,2001.
[16]RICE JA.Undersea networked acoustic communication and navigation for autonomous mine-countermeasure systems[C].Proceedings of the 5 International Symposium on Technology and the Mine Problem,Naval Postgraduate School,Monterey,CA,2002.
[17]王鲁军,凌青,袁延艺.美国声纳装备及技术[M].北京:国防工业出版社,2011.
[18]董阳泽,张刚强,印明明.网络化水声对抗技术[M].北京:电子工业出版社,2012.
[19]朱昌平,韩庆邦,李建.水声通信基本原理与应用[M].北京:电子工业出版社,2009.
[20]凌青,王余,王鲁军.水下警戒探测装备技术发展趋势[J].当代海军,2011(7):13 -18.
[21]郑援,史秋亮.水声对抗,潜艇防御之盾[J].当代海军,2011(7):19-23.
[22]韩树平,程玉胜.美国水下探测系统的发展及现状[J].当代海军,2011(7):24-29.
[23]无人水下航行器进展[M].任志良,张刚,译.北京:电子工业出版社,2009.
[24]许肖梅.水声通信与水声网络的发展与应用[J].声学技术,2009,28(6):811 -816.
Latest development and warfare app ly of networked undersea information system
ZONG Si-guang,WU Rong-hua,ZHANG Xian-feng
(Department of Electron Engineeving,Naval University of Engineering,Wuhan 430033,China)
The underwater space is a transparent bad information space,the underwater information battle develops slowly before.Along with the threat enlargement of the submarine and underwater weapon,the technology developing of underwater detecting,communications,information fusion,undersea information warfare will developing quick and become important parts of themodern seawarfare.The paper analyses the characteristic of America networked undersea information system.And the frame and apply of undersea information warfare is discussed.This makes a stride for pursing the developing of networked undersea information system.
information system;information warfare;seaweb;underwater acoustics network
TB567
A
1672-7649(2014)05-0001-05
10.3404/j.issn.1672-7649.2014.05.001
2013-03-05;
2013-05-08
宗思光(1979-),男,博士,讲师,主要从事激光与物质相互作用、光电对抗领域的研究。
