稳瞄稳向系统可视化仿真平台研究
2014-03-07高伟伟王广龙高凤岐
高伟伟,王广龙,高凤岐,高 爽,贾 波
(1.军械工程学院纳米技术与微系统实验室,河北 石家庄 050003;2.北京航空航天大学仪器科学与光电工程学院,北京 100191;3.西安军代局驻803厂军代室,陕西 西安 710043)
稳瞄稳向系统可视化仿真平台研究
高伟伟1,王广龙1,高凤岐1,高 爽2,贾 波3
(1.军械工程学院纳米技术与微系统实验室,河北 石家庄 050003;2.北京航空航天大学仪器科学与光电工程学院,北京 100191;3.西安军代局驻803厂军代室,陕西 西安 710043)
以防空作战条件下稳瞄稳向系统的研究需求为背景,为实现作战过程的三维一体化仿真,设计基于MFC框架的OpenGL可视化仿真平台实现方案;建立稳瞄稳向系统可视化仿真平台所需的3D模型;通过模型格式转换与加载、模型位姿控制数据的读取,模拟防空作战条件下4个阶段的稳瞄稳向过程。通过与实测数据的连接表明:该可视化仿真平台可作为稳瞄稳向系统性能的验证平台,对系统性能进行直观的评判,具有一定的参考价值。
稳瞄稳向;可视化仿真;MFC框架;OpenGL
0 引 言
稳瞄稳向是指在载体机动条件下,保持瞄准设备与载体姿态变化相隔离,以使瞄准设备稳定指向目标的过程。以防空战为例,在目标捕获、目标跟踪、稳定瞄准和目标打击4个阶段中,均需要利用稳瞄稳向系统,以保持光电瞄准设备的运动与载体的运动相隔离,从而使这4个阶段不受载体姿态变化的影响。按照传统的研制方法,对稳瞄稳向系统性能的验证需要实际试验的支持,例如场地和大量人员及辅助设备;而且根据要求需要飞机与导弹战车在几种不同速度、不同轨迹、不同环境(如天气、路况等)条件下进行试验,其研制过程漫长而且花费巨大。目前,国内对稳瞄稳向系统的仿真研究大多还处在二维仿真阶段,即只能通过解算显示数据、绘制二维曲线等。这样的仿真不仅不直观且难理解。同时,加大了对仿真结果正确与否的验证难度。在经费有限的情况下,对稳瞄稳向系统的研究难以得到实际试验的支持;而基本的二维仿真结果不直观,且验证复杂;这就需要寻求另外一种方式——可视化仿真技术。本文通过可视化仿真技术对目标、武器、环境等试验部分进行建模,并采用模型读入、轨迹设定、程序控制等方法对试验装备状态及环境进行模拟,为稳瞄稳向系统的研究提供可视化验证平台[1-3]。

图1 稳瞄稳向系统可视化仿真平台实现方案
1 稳瞄稳向系统可视化仿真平台实现方案
以防空试验为例,对稳瞄稳向系统进行可视化仿真研究,首先需要建立3D模型,如飞机模型、瞄准设备视场模型以及导弹模型;其次需要建立一个软件环境,并在该软件环境下实现对各模型的读入、显示与控制;最后,需要将实际数据与仿真环境结合,实现防空试验条件下各模型状态、环境的模拟,最终实现对稳瞄稳向系统性能的验证与评价。
在可视化三维仿真研究方面,OpenGL(open graphic library)具有绘制三维图形的各项功能,它是处理专用图形硬件的软件接口,支持可视化的实现,它是三维的计算机图形和模型库,独立于窗口系统和操作系统[4]。以OpenGL为基础开发的应用程序可以方便地在各个平台间移植,特别是在三维图形的功能上非常优良[5];然而,OpenGL并没有提供三维模型的高级命令,也是通过基本的几何图元——点、线及多边形来建立三维立体模型的,这使得建立结构复杂的3D模型工作量很大[6]。与OpenGL相比,采用3dsMax软件建立3D模型可大大减小工作量,且建立的模型效果更加逼真,但3dsMax软件建立的3D模型交互性较差,实现实时控制较困难[7-8]。综合OpenGL的控制优势和3dsMax的建模优势,首先采用3dsMax建立稳瞄稳向系统可视化仿真平台中各模型,然后将这些模型转化为OpenGL程序,并对其进行控制。
由于OpenGL是3D图形的底层图形库,不能直接用以描述场景[9];为此,可利用VC++环境下MFC提供的基于Windows的应用程序框架,使用丰富的窗口和事件管理函数来调用OpenGL函数实现3D模型的显示与控制[10]。
综上分析,稳瞄稳向系统可视化仿真平台实现方案如图1所示。采用3dsMax软件建立.3ds格式的3D模型,并通过View3ds将.3ds模型转换为相应的OpenGL可读的.h与.gl文件;在VC++环境中建立基于MFC的仿真平台框架,并在该框架下对OpenGL环境进行渲染与初始化;通过加载各模型转换得到.h与.gl文件,采用OpenGL程序读取各模型信息,通过加载实测或设定数据,实现对模型速度、位置、姿态的控制,最终实现稳瞄稳向系统各模型的可视化仿真,通过仿真结果对稳瞄稳向系统性能进行评价。
2 模型的建立与转换
基于3dsMax在3D建模方面的优势,在3dsMax环境下,对飞机、瞄准设备视场环(简称瞄准环)、导弹分别建模,得到结果如图2~图4所示。
各模型图中分为4个模块,分别为3D模型的顶视图、前视图、左视图以及透视图,在建立模型后分别将其导出,并存储为.3ds格式文件。
采用View3ds软件将.3ds格式的模型信息转化为.gl与.h文件,用以在基于VC++的MFC框架下,采用OpenGL语言对模型进行读入与控制。
3 模型信息的读入与控制
3.1 仿真平台框架的建立
稳瞄稳向系统可视化仿真平台是在Visual C++ 6.0上利用MFC和OpenGL进行开发的,在创建各系统之前,首先要创建应用程序框架,为后续系统的开发提供基础。本文通过构建一个基于单文档的OpenGL图形程序框架,在此框架的基础上利用OpenGL进行场景绘制,并利用MFC类库函数进行各种功能的设计与实现。构建一个基于单文档的OpenGL图形程序框架,需要为一个基于单文档的MFCAppWizard(exe)工程进行相关的初始化设置,包括:OpenGL库文件和头文件的添加,窗口函数的重载,创建像素格式和绘制描述表等,最终编译运行,生成基于OpenGL的仿真平台框架。
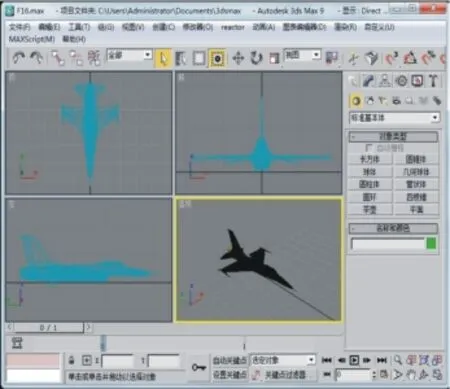
图2 飞机模型

图3 瞄准环模型
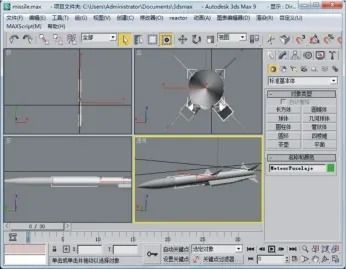
图4 导弹模型
3.2 模型信息的载入
通过View3ds软件将.3ds格式的模型信息转化为.gl与.h文件后,将这些文件导入到当前工程目录中,在初始化部分加入相应代码。以飞机模型feiji. 3ds转换生成的feiji.gl与feiji.h为例,对其进行载入的基本步骤如下:
步骤1:将feiji.gl与feiji.h导入当前工程目录中;
步骤2:在CView.cpp中包括头文件:#include“feiji.h”;
步骤3:在初始化部分加入代码:

步骤4:在构建好的框架程序中,在CView.cpp中添加成员函数RenderScene()。在此函数中调用其列表glCallList(MODEL)进行飞机模型的绘制。
瞄准环模型转换文件 miaoz.gl、miaoz.h与导弹模型转换文件 missile.gl、missile.h的载入方法同上。
3.3 模型位姿状态的控制
在载入模型信息后,需要对模型位姿状态进行控制,其中主要用到OpenGL的模型变换函数glTranslatef(x,y,z)、glRotatef(angle,x,y,z)。
glTranslatef(x,y,z)用指定的x,y,z值沿x轴、y轴、z轴平移物体,以实现模型位置在屏幕中的移动。glRotatef(angle,x,y,z)中,第 1个变量 angle制定模型旋转的角度,单位为度,后3个变量表示以原点(0,0,0)到(x,y,z)的连线为轴线逆时针旋转物体,以实现模型姿态在屏幕中的变化。
以飞机的位姿状态控制为例,飞机的位姿分为位置和姿态。位置由X、Y、Z3个坐标值确定,姿态包括俯仰、翻滚和偏航3个欧拉角。以机体坐标系为基准,飞机的位置变换,即沿OpenGL世界坐标系的3个坐标轴进行平移。飞机的姿态变换,即绕着机体坐标系的3个轴进行旋转。飞机的俯仰为绕X轴旋转,翻滚为绕Z轴旋转,偏航为绕Y轴旋转。飞机的位姿控制由OpenGL模型转换函数glTranslatef()和glRotatef()完成。在绘制飞机前调用相应控制函数,通过不断地改变3个坐标值和各角度值,实现飞机的位姿变换。
瞄准环模型与导弹模型的位姿状态控制方法同上。
4 稳瞄稳向系统可视化仿真平台的实现
在防空作战中,对飞行目标(本文设定飞行目标为飞机)的打击可分为目标捕获阶段、目标跟踪阶段、稳定瞄准阶段以及目标打击阶段。在实际防空作战中,瞄准设备安装在运动载体上,载体姿态的变化会对瞄准设备的姿态产生影响,一次姿态的跳变可能导致目标偏离至视场外,使得瞄准视场中不能稳定的出现目标。因此,在这4个阶段中,均需要利用稳瞄稳向系统,以保持光电瞄准设备的运动与载体的运动相隔离,从而使4个阶段对目标的捕获、跟踪、瞄准、打击不受载体姿态变化的影响。根据稳瞄稳向系统可视化仿真平台的开发需求,本文建立了基于VC++环境的MFC仿真平台框架,并在该框架下对OpenGL环境进行渲染与初始化;通过读入所建模型,以及模型驱动数据,实现了模型位姿的控制与显示,逼真的模拟了防空作战条件下4个阶段(从左至右依次为目标捕获、跟踪、瞄准、打击阶段)的稳瞄稳向过程,如图5所示。

图5 防空作战4个阶段模拟演示
在稳瞄稳向系统可视化仿真平台中,以3dMax建立的飞机模型模拟飞行目标,用瞄准环模型包含的视场区域模拟光电瞄准设备捕获视场,导弹模型为打击武器。通过读取飞机、瞄准环与导弹的位置与姿态驱动数据,在仿真平台中观察瞄准环视场区域对飞机的捕捉、跟踪与瞄准情况,可对稳瞄稳向系统的性能进行验证。若瞄准环视场区域在4个阶段分别能对飞机进行捕获、稳定跟踪、稳定瞄准直到命中目标,则说明稳瞄稳向系统性能满足要求,若出现丢失目标或不能稳定瞄准的情况,则说明系统性能不满足指标要求。依照以上标准,图5的仿真结果表明,设计的稳瞄稳向系统性能符合指标要求。
5 结束语
以防空战为例,根据稳瞄稳向系统的要求设计了稳瞄稳向系统可视化仿真平台实现方案;建立了相应的3D模型,构建了基于VC++环境的MFC稳瞄稳向系统仿真平台框架,在该框架下对OpenGL环境进行渲染与初始化;通过编程与模型数据的驱动模拟了防空作战条件下4个阶段的稳瞄稳向过程,实现了稳瞄稳向系统可视化仿真平台的开发。该平台可用于防空作战条件下的稳瞄稳向系统性能的验证,通过模型与场景的替换亦可实现不同作战环境下稳瞄稳向系统性能的验证,具有一定的参考价值。
[1]叶舸,田兆锋.基于OpenGL的飞机飞行实测数据可视化研究[J].航空学报,2011,32(6):1050-1057.
[2]李春香.飞行数据可视化技术研究[J].中国安全科学学报,2009,19(1):166-171.
[3]唐永哲,刘辉.导弹三维模型的OpenGL仿真界面程序设计[J].弹箭与制导学报,2004,24(2):111-113.
[4]Mei J H,Lei X Y.Research on virtual object manipulation technology[J].Journal of System Simulation,2009,33(3):330-332.
[5]Xiong Y J, Li S Q.Operating technology of virtual robot based on data glove drive[J].Mechanical Science and Technology,2010,12(23):112-115.
[6]李丽荣,沈春林,陆宇平.基于OpenGL的飞行器超低空追击与拦截三维可视化仿真系统[J].南京航空航天大学学报,2009,37(3):269-273.
[7]陈俊涛,肖明,郑永兰.用OpenGL开发地下结构工程三维有限元图形系统[J].岩石力学与工程学报,2009,25(5):1016-1020.
[8]高颖,黄罗军,许志国.基于OpenGL的某导弹视景仿真技术研究[J].兵工学报,2007,28(1):125-128.
[9]芦欣.基于3DSMAX和OpenGL的飞行仿真的实现[J].石家庄铁道学院学报:自然科学版,2008,21(4):75-78.
[10]见英,叶榛,郭杰.无人机飞行视景仿真平台的设计与实现[J].计算机工程,2009,31(14):190-192.
Study on visual simulation platform of stable targeting system
GAO Wei-wei1,WANG Guang-long1,GAO Feng-qi1,GAO Shuang2,JIA Bo3
(1.Nanotechnology and Microsystems Laboratory,Ordnance Engineering College,Shijiazhuang 050003,China;2.School of Instrument Science and Opto-electronics Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)3.Military Representative Office of 803 Factory,Xi’an 710043,China)
According to the research needs of stable targeting under air defense conditions,an achieve program adopt OpenGL based on MFC is designed to achieve operational integration process of the three-dimensional simulation.Some 3D models are modeling as need,through the model and control data read,four stages of stable targeting under air defense conditions are realistically simulated.In connection with the actual measurement data,the visual simulation system can be a verification platform for evaluating the performance of stable targeting system,which can give an intuitive judgment.In summary,the study on visual simulation platform of stable targeting system will be important military significance and reference value.
stable targeting;visual simulation;MFC;OpenGL
TJ06;TJ810.3+7;TP391.9;TN911
:A
:1674-5124(2014)06-0137-04
10.11857/j.issn.1674-5124.2014.06.035
2014-02-24;
:2014-04-29
高伟伟(1986-),男,博士研究生,研究方向为微型测控系统。