利用数字高程模型自动检测火星表面陨石坑
2014-03-06张腾宇金双根崔祜涛
张腾宇,金双根,崔祜涛
(1.中国科学院上海天文台,上海200030;2.中国科学院大学,北京100049;3.哈尔滨工业大学,哈尔滨150000)
利用数字高程模型自动检测火星表面陨石坑
张腾宇1,2,金双根1,崔祜涛3
(1.中国科学院上海天文台,上海200030;2.中国科学院大学,北京100049;3.哈尔滨工业大学,哈尔滨150000)
为了克服利用影像识别陨石坑的诸多限制因素,利用“火星全球勘探者”(MGS)火星激光高度计(MOLA)得到的火星三维DEM数据,转换获得地形曲率,然后利用设定阈值将曲率图转换为二值图像,结合图像分割floodin算法可以得到待检测陨石坑,最后利用Hough变换可以检测出陨石坑。其成功率达到73.4%,可以有效地从DEM中识别陨石坑。利用DEM识别陨石坑的方法可以识别更多新的陨石坑,为现存的陨石坑目录提供新的数据信息。
火星陨石坑;自动识别;数字高程模型
0 引言
陨石坑是行星表面由于陨石撞击而形成的一种自然特征,是最常见的地貌单元,也是表征行星表面形貌的一种重要途径。识别陨石坑可以了解行星表面特征和地质演化历史,因此有很多针对陨石坑的研究[15]。研究火星表面陨石坑的分布特征、形态结构和数量有重要意义,一方面可以用于研究陨石坑形成机理和动力学,了解火星表面演化历史[6],评估火星表面地质单元的相对或绝对地质年龄,特别是在缺少火星表面岩石样品,没有直接对火星表面地质年代进行精确描绘的情况下,进行陨石坑的研究显得尤为重要。由于陨石坑的坑边缘形态比较稳定,因此一般在火星表面陨石坑大多数呈碗型,多数方法均是基于陨石坑的这种形态结构进行识别,这也是最直接而有效的一种方法。另一方面陨石坑识别可为行星表面着陆器的导航提供地标[7]。因此对火星表面陨石坑进行识别是十分必要的。然而以前识别陨石坑多数利用手动判别,由于火星表面陨石坑分布众多,尺寸不一,因此手动建立一个火星表面的陨石坑目录效率低下,需要耗费大量的时间与人力。
陨石坑目录记录了陨石坑大小以及分布信息,是研究火星陨石坑必不可少的数据。要构建一个完备的火星陨石坑目录,需要利用一种高效的自动识别算法对火星表面丰富的陨石坑进行有效的识别。通常陨石坑的识别主要可以分为三类:一类是基于光学影像的灰度特征,第二类是基于影像的光谱信息,还有一类就是基于数字高程模型DEM的算法[8]。现有的陨石坑自动识别算法大部分都是基于光学影像数据,Salamunicar等(2012)[9]对各种算法进行了综述,有82种基于光学影像的算法,39种基于DEM数据,16种算法同时利用了两种数据,而只有3种算法利用了其他数据。大部分的算法都是基于影像,是因为目前大部分可获得的行星表面的数据都是遥感影像,而由于遥感影像数据受太阳光照和飞行器姿态等因素影响,造成光学影像成像不均匀,并且有各种阴影区,这对陨石坑的识别是一个极大的挑战。因此基于遥感影像的识别方法需要对影像进行多步预处理,然后利用陨石坑的边缘特征进行识别,这些方法都会因为成像条件的原因受到很大的限制,例如模板匹配[10]、纹理分析[11]及基因算法[12]等,这些方法都是基于具体的影像特征进行处理识别陨石坑,对数据条件有很大的依赖性,而且由于陨石坑形态种类繁多,很多受到侵蚀风化,限制了这些方法的应用,对陨石坑的识别造成很大影响。另一方面,由于光学影像只能提供陨石坑的二维信息,比较适合人眼进行识别,却不适合机器自动识别,是因为光学影像受成像条件影响,常常不同于实际地形,并不能反映实际的地形情况。而DEM却不会受到这些因素的影响,并且提供了陨石坑结构的三维信息,为陨石坑的识别提供了极佳的条件。但是利用DEM进行识别也受到一定局限性,主要是由于DEM数据相对光学影像数据偏少。
本研究利用火星全球勘探者(MGS)火星激光高度计(MOLA)得到的火星三维DEM数据进行火星陨石坑自动识别,并分析和评估火星陨石坑识别成功率。第一部分主要介绍了论文所使用的数据来源;第二部分对具体识别方法进行了分析说明;最后对识别结果进行了讨论和评估。
1 数据
本研究中采用的是MOLA测量得到的地形高程数据,由于其空间分辨的限制,可以识别的陨石坑直径大于6 km。本研究选取研究区域范围大小为159.53~180°W,27.3~11.7°S,选取区域包含Gusev陨石坑(图1),此处是“勇气号”登陆点。为了验证本方法的区域适用性,所选区域地形较为复杂,分布了大量不同历史时期形成的陨石坑,且类型丰富,因此选取此区域作为实验研究区域。由于火星内部与外部过程使得陨石坑受到不同程度的侵蚀和破坏,需要研究陨石坑的形态结构和特征,本研究方法的结果可以应用到火星表面历史年代测定的研究工作中。
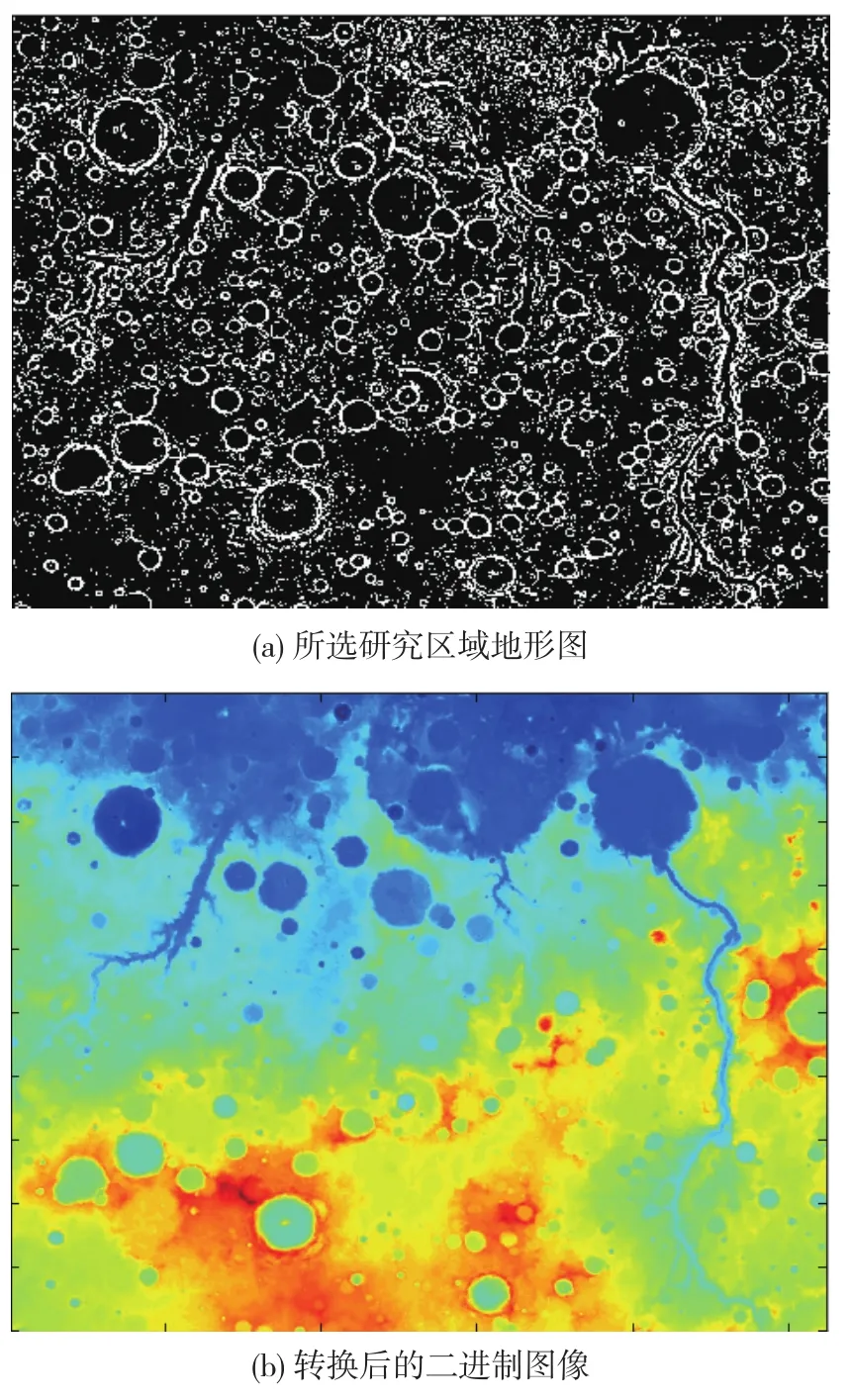
图1 所选研究区域地形图和转换后的二进制图像Fig.1 Topography map for experiment and the binary map after transformation
2 方法
利用遥感影像数据主要是二维几何算法,从影像上陨石坑的光照或阴影区特征进行识别,或者利用陨石坑在遥感影像上的纹理特征进行识别,这些方法都受成像条件干扰较大,计算步骤较为复杂,而利用DEM数据识别陨石坑比光学影像数据更加方便,由于陨石坑独特的碗型结构,相比于其他地形地貌,可以在三维空间里更好地表示出来。根据陨石坑的坑边缘高程相对于周围区域要高的特点,利用高程的信息计算地形坡度及曲率的变化,就可以反映出陨石坑边缘的特征,利用此特征可以识别陨石坑。具体流程见图2。
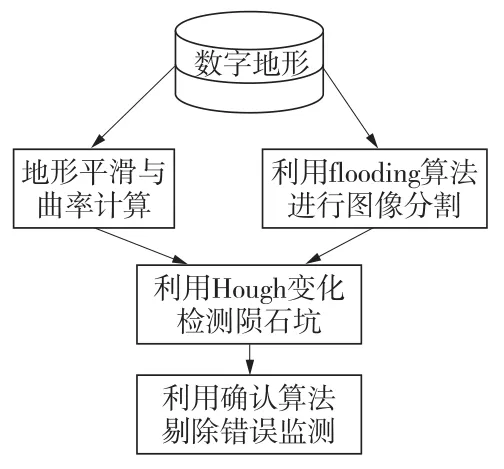
图2 检测过程流程图Fig.2 The flowchart of detection process
2.1 DEM预处理
本研究中利用的是MOLA生成DEM模型,模型的空间分辨率是1/128°。研究采用的DEM模型是栅格数据集,每一个像素点代表一个对应位置的高程值。通常可以利用坡度测量来反应陨石坑的边缘特征,然而研究发现坡度测量在应用于小陨石坑或者退化的陨石坑时不能很好地显示边缘特征。而地形曲率可以很好地反映出陨石坑的边缘特征。因此本研究中将采用地形的曲率特征来对陨石坑边缘特征进行描述。计算每一个位置点的曲率公式如下
当对地形处理求取地形曲率后,我们可以计算出相应坐标点上的曲率。根据经验数据,可以将曲率图转换为二进制图像

这里的kth根据经验值选取为—0.001,为了更多反映出陨石坑边缘的细节特征,从而识别小尺度的陨石坑,转换后的二进制图像如图3(a)所示。
2.2 图像分割选取备选区域
陨石坑在行星表面是相当于闭合的盆地区域,因此可以将flooding算法[13]应用于陨石坑的识别研究。flooding算法可以提取河谷及洼地等地貌形态,而由于火星表面陨石坑风化严重,并且有很多重叠的陨石坑,如果单独使用该算法进行陨石坑识别,并不能很有效地提取陨石坑。本研究中利用该算法来进行备选区域的分割,用来为下一步识别减小计算量,提高识别效率。
将该算法应用到实验研究区域,可以提取该区域的沟壑及盆地地形,如图3(a)所示。其中红色区域可能存在陨石坑,因此我们将半径大于3个像素的红色区域进行分割出来作为备选区域,根据边缘将每个区域用一个白色矩形分割,每个矩形区域将单独进行陨石坑地识别。本研究将每个矩形用一个独立的标记Ik进行区分,k=1,2…,n,n是矩形区域的个数,每个矩形在图中相应的位置可以计算得到。分割图结果如图3(b)所示。
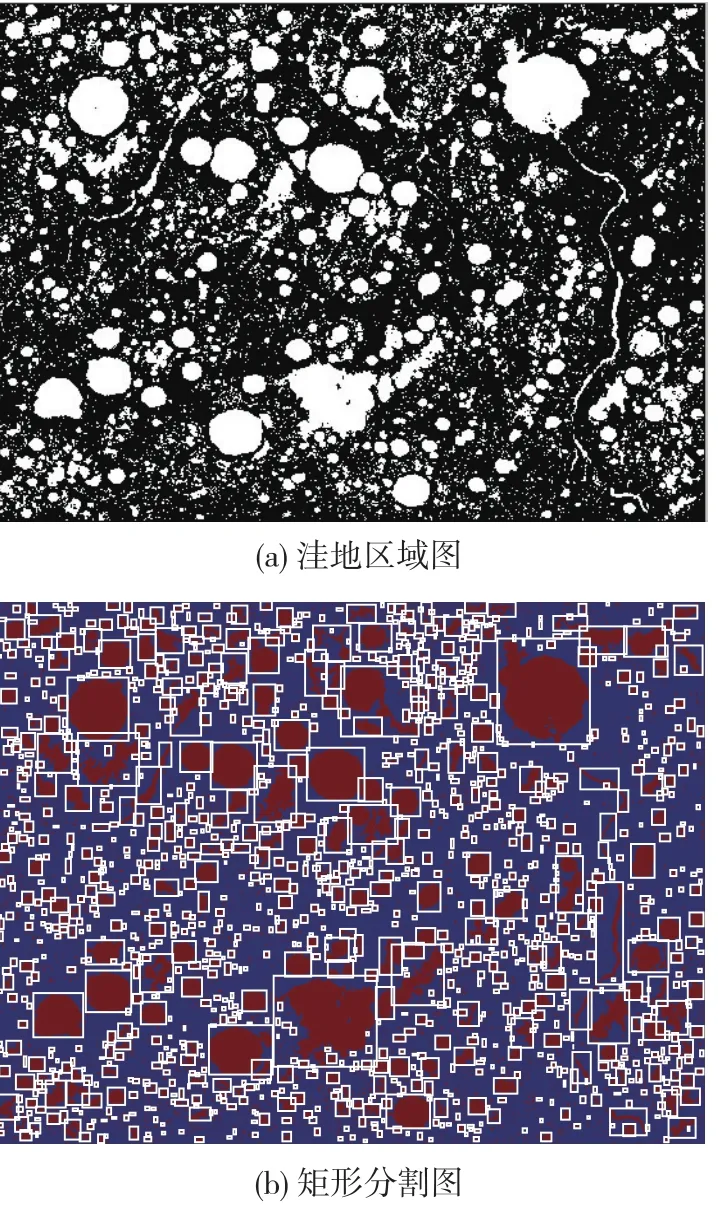
图3 flooding算法得到的洼地区域和矩形分割图Fig.3 The basin area by using flooding algorithm and segmentation map
2.3 检测与确认陨石坑
在经过上一步的分割之后,可以将每一个分割区域的矩形内二进制图像进行分割,这样就可以得到一系列包含陨石坑边缘的待识别图像。首先,将每个图像进行形态学的闭合操作,将不连续的边缘进行连接,然后使用3×3的平滑算子对其进行平滑细化操作,达到所有边缘均为一个像素。下一步就可以将处理完的图像进行Hough变换识别陨石坑,对每个分割的区域Ik单独进行Hough变换,在进行Hough变换时,由于陨石坑边缘的不确定性以及前面操作引入的误差,此时Hough变换将会引入很多误判,如图4所示。
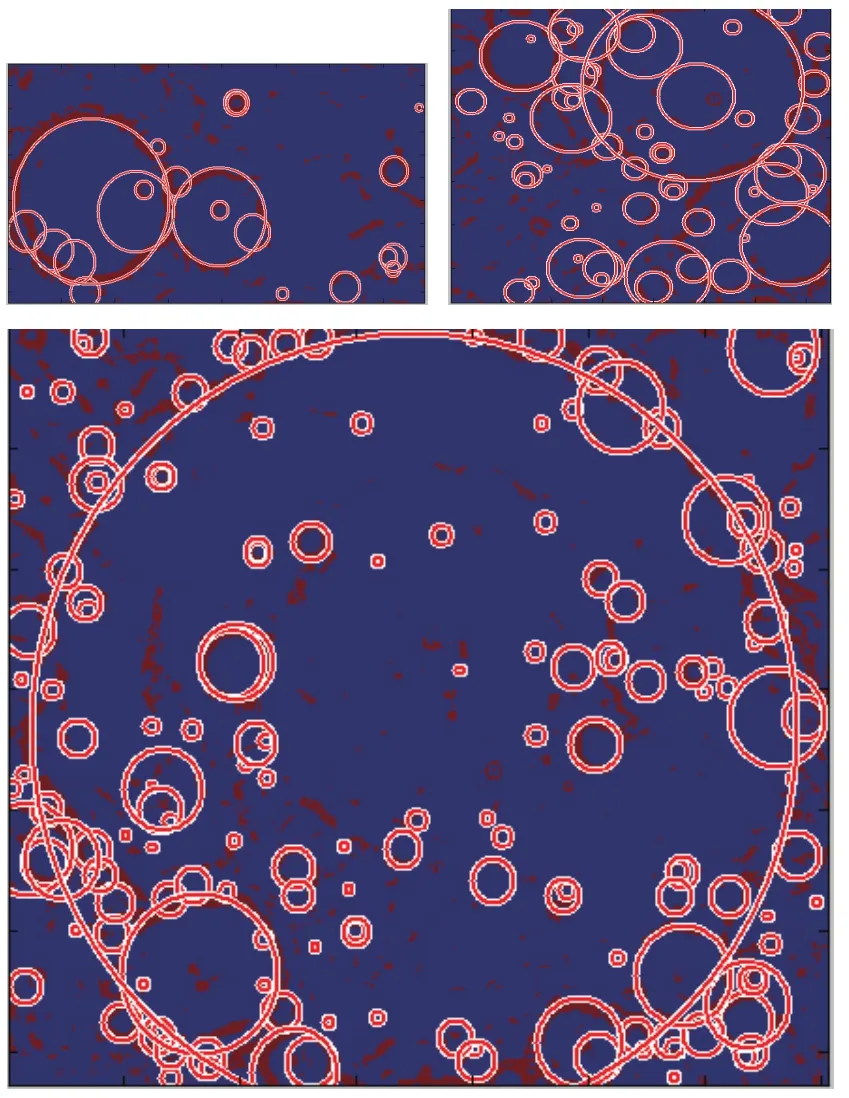
图4 Hough变换识别结果Fig.4 The recognition results by Hough transform
由于Hough变换并不能精确地对所有陨石坑进行识别,只能减少候选陨石坑的数目,这是由陨石坑边缘形态复杂性导致的。下一步需要将误判结果剔除,并对识别结果进行确认,需要使用确认算法进行陨石坑的确认。算法需要将前面判别的结果进行筛选,也就是进一步判别经过Hough变换后的图像。对于第i个对象,陨石坑边缘像素点需要满足如下关系

上式中x,y是边缘像素点的坐标;xo,i,yo,i是陨石坑中心坐标;ri是其半径,即所有边缘像素点应该在一个(1—ε)ri至(1+ε)ri的圆环之内,其中ε根据实际选择条件选取。另外由于边缘像素点可能不连续,需要对其完整度进行判定,即统计总共有多少个像素点在圆环内,判定每个待定陨石坑边缘的完整度Ci。然后引入判定陨石坑边缘圆度,计算公式如下

其中,S陨石坑边缘像素的面积;P是坑边缘的周长。根据不同大小的陨石坑判定其圆度Ri,最后可以根据经验值设定判断的阈值,确定待测图像是否包含陨石坑。
3 结果与讨论
为了评估本研究方法的研究结果,采用了以下评估因子进行评定
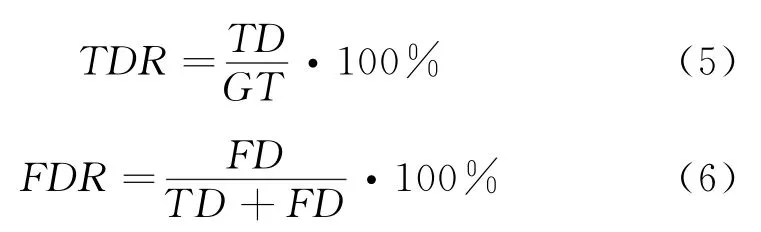
其中,TD是正确识别陨石坑的个数;FD是误判的个数;GT是实验区域所有陨石坑的个数;TDR为识别正确率。FDR是错误识别率。通过正确率与错误率可以对本算法的有效性进行定量评估。
由于本研究中使用MOLA的DEM分辨率限制,识别的陨石坑半径在3 km以上,本实验采用的是Robbins(2012)[14]的陨石坑目录,该陨石坑目录是通过目视判别光学影像,从而提取陨石坑特征,是通过长期精细的测量之后构建的,也是目前最新的得到认可的陨石坑数据库,因此可以作为本研究的使用参考标准。本研究选择的区域大小为1.3× 106km2,总共有672个已经确认识别的陨石坑作为比较,本算法识别情况如表1所示。可以看出在研究区域存在半径3~5 km大小的陨石坑数目最多,其中识别难度也最大,误判个数有125个,误判率在32.8%,这是因为小陨石坑边缘被处理之后,识别较为困难,并且小陨石坑退化后边缘与周围高差减小,增加了识别的错误率。在半径10 km以上的陨石有138个,其中成功识别了116个,识别成功率高达84%,这是由于半径较大的陨石坑相对小陨石坑风化程度较小,可以比较清晰地识别其坑边缘结构。在研究区域本算法总共识别出495个陨石坑,识别成功率在73.4%。
表1 识别正确与误判的陨石坑Table 1 The true detection and false detection of craters
4 结论
本研究提出利用DEM对火星表面陨石坑进行识别的方法,由于陨石坑在火星表面的特殊性,识别陨石坑有着很重要的作用。本研究提出的识别陨石坑的方法是无监督自动识别算法,主要利用了陨石坑边缘在DEM里通常表现为区域最大值,因而可以通过计算曲率的方法将其提取。由于火星表面影像数据存在诸多影响因素,为陨石坑的识别增加了许多困难,因此构建利用DEM识别陨石坑的方法十分重要。本研究中提出利用DEM识别陨石坑成功率在73.4%,误判率为31%,下一步需要将算法优化降低误判率。同时欧空局发射的最新的火星探测计划火星快车(Mars Express)上搭载了高清立体相机(High Resolution Stereo Camera),可以测量得到更精细的地形,可进一步识别更多更精细的陨石坑,也为研究火星表面的演化历史提供基础。
致谢
感谢美国宇航局(NASA)免费提供“火星全球勘探者”(MGS)“火星激光高度计”(MOLA)火星三维DEM数据下载,以及科技部973项目(2012CB72000)和中科院重要方向项目(KJCX2-EW-T03)资助。
[1] Cheng Y,Goguen J,Johnson A et al.The Mars exploration rovers descent imagemotion estimation system[J].IEEE Intell.Systems,2004,19(3):13- 21.
[2] Johnson A,Willson R,Goguen J et al.Field testing of the Mars exploration rovers descent image motionestimation system[J].IEEE International Conference on Roboticsand Automation,2005:1- 7.
[3] Kim J,Muller J P,Van Gasselt S.et al.Automated crater detection:A newtool for Mars cartography and chronology [J].Photogram.Engin.and Remote Sensing,2005,71 (10):1205- 1217.
[4] Sawabe Y,Matsunaga T,Rokugawa S.Automated detectionand classification of lunar craters using multiple approaches[J].Adv.Space Res,2006,37(1):21- 27.
[5] Jin S G,S Arivazhagan,H Araki.New results and questions of lunar exploration from SELENE,Chang'E-1, Chandrayaan-1 and LRO/LCROSS[J].Adv.Space Res, 2013,52(2):285- 305.doi:10.1016/j.asr.2012.11.022.
[6] Crater Analysis Techniques Working Group.Standard techniques for presentation and analysis of crater size—frequency data[J].Icarus,1979,37:467- 474.
[7] Leroy B,Medioni G G,Johnson E,et al.Crater detection for autonomous landing on asteroids[J].Image and Vision Computing,2001,19(11):787- 792.
[8] Barlow N G,Barnes C W,Barnouin-Jha,et al.Utilizing GIS in Martian impact crater studies[C]∥Proceedings of the ISPRS WG IV/9Extraterrestrial Mapping Workshop: Advances in Planetary Mapping.[s.l.]:[s.n.],2003.
[10] Michael G.Coordinate registration by automated crater recognition[J].Planetary Space Sci,2003,51(9):563- 568. [11] BarataT E,AlvesI,Saraiva J,et al.Automatic recognition of impact craters on the surface of Mars[J].Image Analysis andRecognition,Lecture Notes in Computer Science. New York:Springer-Verlag,2004,3212:489- 496.
[12] Brumby S,Plesko C,Asphaug E.Evolving automated feature extraction algorithms for planetary science[C]∥Proc.ISPRS WGIV/9:Extraterrestrial Mapping Workshop—Advances Planetary Mapping.Houston,TX:[s.n.],2003.
[13] O'Callagnan J F,D M Mark.The extraction of drainage networksfrom digital elevation data[J].Comput.Vis. Graph.Image Process,1984,28(3):328- 344.
[14] Robbins S J,Hynek B M.A new global database of mars impact craters≥1 km:1.database creation,properties,and parameters[J].Journal of Geophysical Research-Planets, 2012,117,E05004.doi:10.1029/2011JE003966.
通信地址:上海市南丹路80号上海天文台(200030)
电话:(021)34775293
E-mail:zhangty@shao.ac.cn
[责任编辑:宋宏]
Automatic Detection of Martian Impact Craters Based on Digital Elevation Model
ZHANG Tengyu1,2,JIN Shuanggen1,CUI Hutao3
(1.Shanghai Astronomical Observatory,Chinese Academy of Sciences,Shanghai 200030,China;2.University of Chinese Academy of Sciences,Beijing 100049,China;3.Harbin Institute of Technology,Harbin 150001,China)
Due to uncertainties of illumination and incidence in image processing,a method that impact craters are automatically detected and recognized based on the DEM from Mars Orbiter Laser Altimetery(MOLA)aboard Mars Global Surveyor(MGS)is proposed in this paper.Topographic curvature,which delineates impact craters, can be deduced from topography data.The thresholding map of curvature is transformed into a binary map,from which we can detect impact craters by combination of segmentation and flooding algorithms.The true rate is 73.4% in detecting craters.More impact craters on Mars with confirmation algorithm can be effectively detected truly, which are added to the existing catalog of manually identified Martian craters.
Martian craters;automatic recognition;digital elevation model
P185.3
:A
:2095-7777(2014)02-0123-05
张腾宇(1989—),男,博士研究生,主要研究方向:行星表面特征识别与行星动力学。
2014-02-15;
2014-04-28
科技部973项目(2012CB720000);中科院重要方向项目(KJCX2-EW-T03)
