国外地球静止轨道在轨服务卫星系统技术发展概况
2014-03-06陈士明周志成曲广吉王典军袁俊刚中国空间技术研究院通信卫星事业部
陈士明 周志成 曲广吉 王典军 袁俊刚(中国空间技术研究院通信卫星事业部)
地球静止轨道(GEO)在轨服务技术在促进经济、国防和空间技术发展方面有重要意义。本文概述了国外在轨服务卫星系统技术研究进展,包括美国、欧洲及其他国家的GEO在轨服务研究计划和美国在轨服务关键技术的试验情况,从目标监视和导航测量、捕获连接、在轨服务机械臂和组合体动力学参数辨识及建模控制等方面介绍了在轨服务的关键技术进展情况。总结了在轨服务卫星系统技术的发展现状,提出了未来GEO在轨服务卫星系统技术的发展展望。
1 引言
位于GEO的卫星覆盖面积大,且相对于地面静止,在通信、导航、预警、遥感等军用和民用领域发挥着重要作用。在轨服务是指在空间通过人、机器人或两者协同完成涉及延长各种卫星寿命、提升执行任务能力的一类空间操作。
GEO在轨服务的主要任务、功能和基本内涵包括5个方面:①在轨目标监测,指在目标卫星附近,采用可见光、红外、微波等敏感器对目标卫星进行成像、位姿测量,并获取目标卫星相关信息;②在轨辅助变轨,指服务卫星协助目标卫星进行轨道调整,包括辅助入轨和辅助离轨等;③在轨燃料补给,指通过补给燃料,为目标卫星提供完整的姿态和轨道控制功能,包括燃料加注和接管目标卫星的控制推进系统等;④在轨故障修复,指排除目标卫星的故障,恢复卫星的正常功能,包括更换故障部件和排除故障展开太阳电池翼或天线等;⑤在轨有限装配,指通过更换或增加硬件的方式保持或增强目标卫星的能力,包括更换模块、增加模块和模块的回收利用等。
GEO在轨服务的优势主要是降低卫星任务失败的风险,减少任务费用,增强任务系统功能及提高任务的灵活性等,在经济、国防和促进空间技术发展方面有重要意义。
2 国外在轨服务技术进展情况
对于在轨服务技术特别是GEO在轨服务技术,世界上各个航天大国进行了大量的研究。随着这些项目计划的逐步提出和在轨试验,美国和欧洲等将具有在GEO上对绝大多数合作/非合作目标进行交会、监测、捕获、释放、维修、变轨等操作的技术能力。
美国GEO在轨服务研究计划
美国很早就开展了GEO在轨服务方面的研究,1996年就针对未能入轨的特高频-1(UHF-1)卫星提出了在轨服务设想并申请了专利,随后美国针对GEO卫星提出并开展了一系列在轨服务计划。
(1)“近期能验证的前端机器人”/“通用轨道维修航天器”计划
2004年,美国国防高级研究计划局(DARPA)资助了GEO“通用轨道维修航天器”(SUMO)的研究,其目标是为绝大多数非合作目标进行在轨服务,以演示验证空间交会、自主抓捕等技术。2006年,SUMO更名为“近期能验证的前端机器人”(FREND),旨在开展自主捕获非合作目标的空间机械臂技术演示验证研究。目前,FREND/SUMO计划已经完成地面演示验证,该项目原定于2011年开展低地球轨道(LEO)的飞行演示验证,但至今未有公开报道。
(2)“微卫星技术试验”计划
“微卫星技术试验”(M iTEx)计划是由美国DARPA、空军和海军等共同推出的一项针对合作/非合作目标的在轨目标监视计划。M iTEx系统包括火箭上面级和2颗小卫星。2006年,该计划首次在GEO成功演示了在轨目标监视技术。在完成预定的在轨监视演示任务后,2颗M iTEx小卫星在2008年底至2009年初机动至失效的国防支援计划-23(DSP-23)导弹预警卫星附近,成功对其进行了在轨监测。
(3)“任务扩展卫星”计划
在维维卫星公司(V iviSat)的“任务扩展卫星”(MEV)设计方案中,M EV飞行器与GEO目标卫星交会对接形成刚性连接的组合体后执行在轨服务任务。不同于在轨燃料加注,与目标对接后,M EV为目标卫星提供推进系统的功能。另外,M EV还可以执行辅助离轨任务。
(4)“凤凰”计划
2011年12月,美国DARPA发布了新的GEO在轨服务计划—“凤凰”(Phoenix)计划,该计划旨在重新利用退役或无法正常工作的在轨卫星的大型天线等部件,降低新型卫星的开发成本。Phoenix计划定于2015-2016年进行在轨演示验证,其目标是实现至少1副天线部件的重复利用。

FREND/SUMO计划中的服务卫星
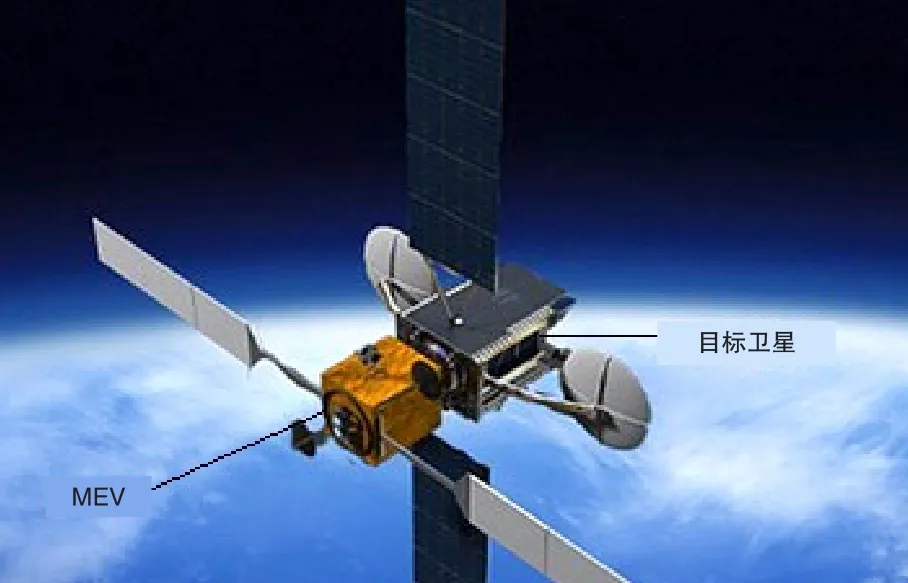
MEV在轨服务设想图
欧洲GEO在轨服务研究计划
(1)“地球静止轨道服务飞行器”计划
欧洲航天局(ESA)于1989年提出了“地球静止轨道服务飞行器”(GSV)的概念,主要用于对GEO卫星进行目标监视、燃料加注、模块更换和辅助离轨等功能。由于种种原因,GSV并没有进入实际工程阶段,而仅开展了概念设计。
(2)“试验服务卫星”计划
德国航空航天中心(DLR)于1994年提出了“试验服务卫星”(ESS)计划,以研究在GEO上对目标卫星进行交会、监视和维修等在轨服务技术。ESS上安装有一个机械臂,用于试验机械臂的遥操作控制技术,完成对故障卫星的捕获、检查和维修。该计划也只进行到概念设计阶段。
(3)“赫尔墨斯”计划
ESA、DLR以及宇宙(Kosm as)公司合作开展了“赫尔墨斯”(H erm es)计划,探索研究在轨的燃料收集和加注技术。Herm es计划收集已失效但仍有燃料的卫星、有多余燃料的正常卫星和火箭上面级中的燃料,然后给需要燃料的GEO通信卫星进行燃料加注。Herm es在轨服务系统包括服务卫星、燃料存储卫星、监视小卫星、可更换推进模块和轨道提升舱五部分,其中仅有服务卫星是必须的。Herm es计划目前还处在概念论证阶段。

GSV的方案设想

ESS计划方案设想图

MiTEx计划方案概念图

Herm es计划的在轨加注想象图
(4)“地球静止轨道清理机器人”计划
2002年开始的“地球静止轨道清理机器人”(ROGER)计划,旨在研究捕获GEO非合作目标卫星并辅助其离轨等技术。服务卫星经地面引导和自主导航至距离目标15m处,然后服务卫星释放网状或绳系抓捕系统捕获目标,随后服务卫星将其拖入“坟墓”轨道,与目标分离后返回GEO等待下一次任务。其验证的关键技术包括空间交会、目标测量、飞网/飞爪捕获技术以及组合体控制技术。由于种种原因,该计划的研究未能继续开展下去,但其思想引起了国际航天界的广泛关注。
(5)“空间系统演示验证技术卫星”计划
“空间系统演示验证技术卫星”(TECSAS)计划的目标是研制一个可接受在轨服务的目标卫星和服务卫星。该计划于2006年终止后,DLR提出了后续研究项目为“德国在轨服务任务”(DEOS)项目。DEOS包括合作目标交会对接、慢旋非合作目标的捕获、组合体轨道机动。尽管DEOS以GEO卫星为服务对象,但近期将先在LEO上开展演示,以验证慢旋非合作目标的捕获连接等关键技术。
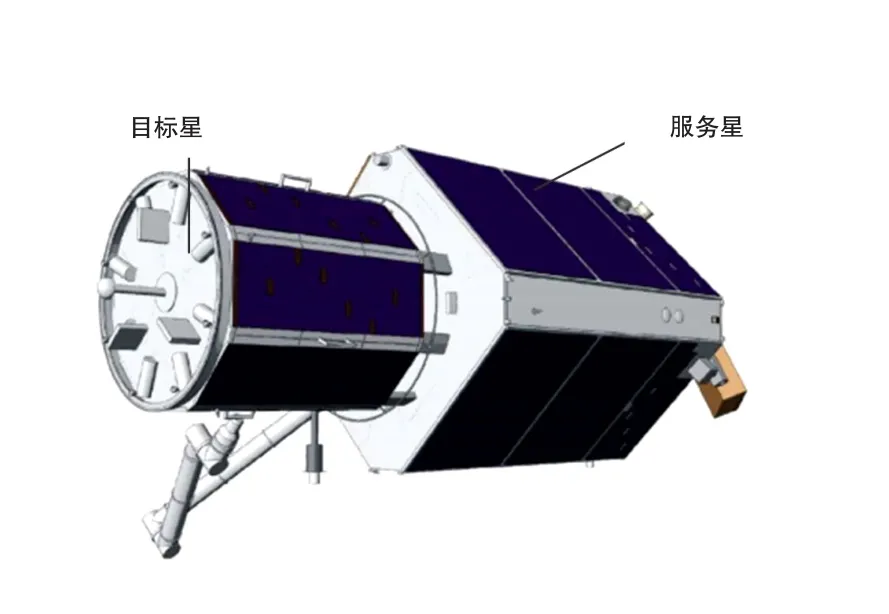
DEOS计划对接示意图
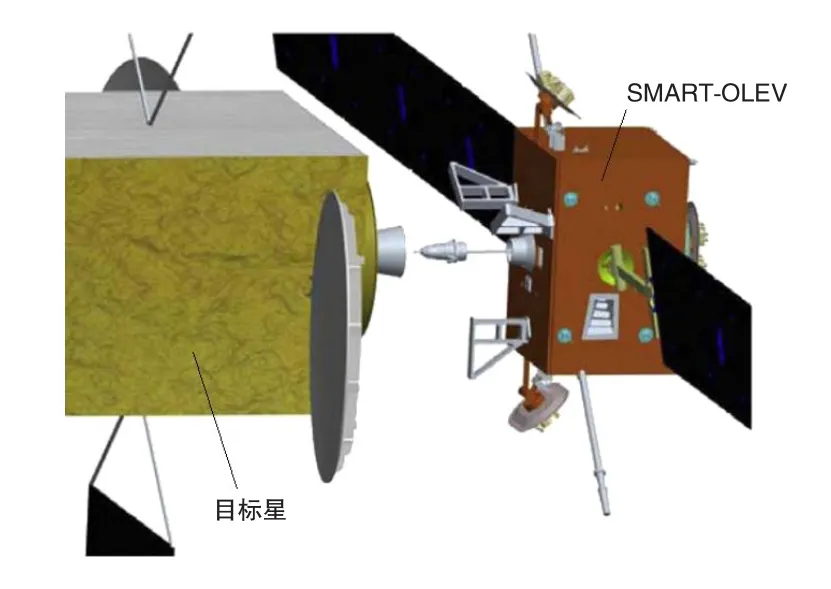
SMART-OLEV与目标卫星的对接示意图

Phoenix计划的在轨演示验证设想
(6)“轨道延寿系统”计划
DLR与轨道复活公司合作,开展了“轨道延寿系统”(CX-OLEV)航天器的研制。CX-OLEV航天器与目标卫星进行对接后,接管目标卫星的姿态和轨道控制功能,使其有效载荷继续工作。由于CX-OLEV航天器是基于ConeXp ress平台建造的,没有经过飞行验证,且仅适用于阿里安-5(A riane-5)运载火箭。因此在新一轮的方案中,采用了经过飞行验证的“小型先进技术研究任务”(SMART)小卫星平台,服务卫星进化成SMART-OLEV平台。

XSS-10小卫星及火箭上面级
其他国家的GEO在轨服务研究计划
(1)“GEO延寿系统”
加拿大麦德(MDA)公司提出了利用机械臂对寿命末期GEO卫星进行燃料加注的“GEO延寿系统”方案设想。该系统利用机械臂捕获目标的远地点发动机喷管形成刚性组合体,然后再打开目标卫星的注排阀门,插入软管泵入适量燃料。另外,该系统还具备简单的维修功能,能够排除太阳电池翼打开等故障。

ROGER计划的流程
(2)“在轨维修系统”计划
日本的“在轨维修系统”(OM S)计划的目标是实现对GEO卫星的在轨监测、维修、辅助入轨以及空间碎片处理等任务。日本国家信息通信技术研究所(N ICT)和三菱重工工业公司(M H I)已经计划在地球同步转移轨道(GTO)利用智慧卫星-1(Sm artSat-1)小卫星来演示验证在轨服务的自主交会技术等关键技术。
XSS-11小卫星设计图

Orbita l Express计划概念图
美国低轨道在轨服务卫星试验计划
(1)“试验卫星系统”计划
“试验卫星系统”(XSS)计划是美国空军提出的模块在轨服务概念的研究计划。目前,已经公布的XSS系列卫星有XSS-10和11。XSS-10的任务目标是演示验证自主导航、近距离交会以及目标监视技术。该任务由微小卫星XSS-10和火箭上面级组成。2003年1月,XSS-10成功完成了在轨试验,验证了微小卫星自主交会、目标监视的软硬件技术。XSS-11小卫星对图像处理技术和自主交会技术进行了改进。XSS-11于2005年4月入轨后,与火箭上面级在0.5~1.5km的距离先后3次成功交会,验证了非合作目标的自主交会技术。
(2)“自主交会技术验证”计划
“自主交会技术验证”(DART)计划是美国航空航天局(NASA)提出的旨在验证自主空间交会技术。DART卫星的任务是在轨道上与目标卫星进行一系列自主交会、逼近和绕飞操作,验证其敏感器、推进系统、控制器及软件的性能。2005年4月,DART卫星发射升空,由于GPS接收机的软件错误导致燃料提前耗完,原计划的16~24h的任务仅进行了11h,最终与目标卫星相撞,任务失败。
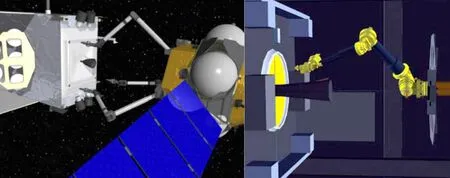
(3)“轨道快车”计划
2007年完成的“轨道快车”(Orbital Exp ress)计划,其验证的关键技术包括自主交会与逼近、自主捕获连接、燃料双向传输、在轨电池和计算机模块更换。Orbital Exp ress计划由目标卫星“下一代卫星”(NEXTSat)和服务卫星“自主空间传送机器人轨道器”(ASTRO)组成。该计划成功完成了在轨飞行试验,由于其具备在轨捕获、模块更换和在轨加注等多项功能,因而受到了高度关注,成为在轨服务技术发展史上的里程碑事件。
3 在轨服务卫星系统关键技术进展
目标监视和导航测量技术
(1)空间交会、绕飞和悬停技术
空间交会技术是实现在轨服务的基础,交会过程中两颗卫星之间的相对位置和姿态控制精度决定了后续捕获连接操作能否顺利进行。目前,针对合作目标的空间交会技术比较成熟,一般采用共椭圆轨道的交会逼近技术。但是对于在轨服务而言,交会过程中需要对目标进行交会、绕飞和悬停,以实现对目标卫星的监视测量,因此需要研究在轨服务的交会技术,包括轨道面内/外绕飞、任意位置悬停等技术。
(2)目标测量敏感器技术
空间目标监视测量是保障在轨服务顺利进行的关键技术。目前能够提供相对运动信息的敏感器包括微波雷达、激光雷达、星敏感器、红外敏感器、可见光相机等。
微波雷达依靠目标表面的蒙皮反射或应答机工作,可用于合作/非合作目标的测量。微波雷达可测量出目标卫星的距离和方位,但在距离较近时距离测量不准。激光雷达通过测量激光在目标和测量设备之间往返时间计算出距离,主要包括激光测距雷达、激光测速雷达、激光跟踪雷达和激光成像雷达。激光雷达可测量合作/非合作目标的距离、速度,甚至可以测量角度及相对姿态等。可见光相机采集目标的图像,通过图像处理技术可以提取目标的几何构型信息。如果在目标上安装有标志器时,可以在较近的距离测量给出目标的相对位置和姿态;如果采用立体视觉技术,在有先验知识的前提下也可以应用于非合作目标的相对位置和姿态测量,但立体视觉技术目前还不成熟。
(3)相对导航滤波技术
在空间交会过程中,由于服务卫星和目标卫星之间距离较近,由地面定轨的绝对导航不再适用,因此需要进行相对导航。相对导航是指服务卫星基于自身携带相对导航设备的测量,在一定条件下实时估计其相对目标卫星的位置和速度的技术。敏感器测量到服务卫星与目标卫星之间的相对运动状态后,需要对运动状态进行滤波估计,使状态估计值比观测值更接近于真实值。
滤波分为线性和非线性两大类,线性滤波的状态方程和观测方程均为线性,主要包括卡尔曼滤波、加权最小二乘滤波等;当状态方程和观测方程全部或部分呈现非线性时,则应采用非线性滤波估计,主要包括推广卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)、粒子滤波等。

MDA公司的GEO延寿系统想象图
FREND抓捕目标星分离螺栓孔和对接环

冠状锁紧式对接机构的对接过程

Orbital Express计划中使用的三叉式对接机构
捕获连接机构技术
捕获连接是指服务卫星捕获目标卫星并与其连接形成整体。根据最终连接形式,捕获连接可分为刚性连接和柔性连接。
目前,载人飞船上的对接机构有杆锥式和异体同构周边式,这些对接机构一般质量较大,适用于有人员或大量货物运送需求的对接。而在轨服务特别是GEO在轨服务没有大量货物运送的需求,因此一般采用小型对接机构。根据国外目前已有的捕获对接方案,综合可以得出捕获连接机构主要分为如下三类:
(1)类杆锥式捕获对接机构
类杆锥式捕获对接机构由可伸缩的杆和接纳锥组成,杆伸入接纳锥后,靠接纳锥的导向作用进入锥孔后部并锁紧。类杆锥式属于刚性连接机构,可用于合作或非合作目标的捕获对接。典型的类杆锥式对接机构包括软轴式对接机构和冠状锁紧式对接机构。冠状锁紧式对接机构是与目标卫星远地点发动机喷管对接,并形成刚性连接的机构。
(2)爪式捕获对接机构
爪式捕获对接机构是通过手爪捕获并拉紧锁定的对接机构,一般包括抓手和供抓捕的把手或机构组成。由于需要在目标卫星上安装把手或供抓捕的机构,爪式捕获对接机构一般用于合作目标的捕获对接。典型的爪式捕获对接机构包括Orbital Express计划的对接机构和抓手碰锁式对接机构。Orbital Express计划中的对接机构是通过丝杠-抓钩系统技术实现的。
(3)绳系捕获机构
绳系捕获机构包括飞网捕获机构和飞爪捕获机构,其中飞网/飞爪与服务卫星通过绳子连接,捕获目标卫星后形成服务卫星和目标卫星的绳系卫星。绳系捕获机构属于柔性捕获机构,一般适用于非合作目标的捕获。典型的绳系捕获机构是ROGER计划中提出的。
在轨服务机械臂技术
在轨服务的机械臂操作任务包括部件拆卸与安装、燃料接口对接等,这些复杂任务对机械臂的运动精度和反馈控制形式等提出了很高的要求。
美国NASA联合加拿大航天局(CSA)在“国际空间站”(ISS)上成功利用机械臂进行了燃料加注试验,试验使用了专门设计的末端工具为那些设计时未考虑在轨加注和维修的航天器提供在轨服务,开展了多项在轨加注操作,包括剪断系绳、划开隔热多层、移除加排阀安全帽、模拟燃料传输等。
在轨服务机械臂还可以完成辅助捕获对接操作,比如FREND计划中利用机械臂抓捕目标卫星的分离螺栓和对接环。

Orbital Express计划的机械臂抓捕
组合体动力学参数辨识技术
服务卫星与目标卫星连接后形成组合体,其动力学参数相比于服务卫星有较大变化,因此需要研究组合体的动力学参数辨识技术。目前卫星的动力学参数辨识方法包括滤波方法和最小二乘法。
(1)滤波方法
滤波方法的原理是把动力学参数增广到系统状态方程中,结合高精度的敏感器测量信息进行滤波估计。动力学参数辨识采用的滤波算法包括高斯二阶滤波、卡尔曼滤波和非线性滤波。
(2)最小二乘法
最小二乘法的基本思想是根据动量定理和角动量定理构造星体动力学参数的最小二乘估计模型,并结合一定时间内的加速度、角速度、角动量、姿态等测量信息序列进行参数最优估计。最小二乘法可以得出质量和惯量等参数,使用的方法包括分布式递推最小二乘辨识法和改进的最小二乘估计法等。
组合体动力学建模与控制技术
卫星的动力学建模技术已经日渐成熟,卫星的轨道和姿态控制方面也形成了较成熟的设计方法。但对于组合体而言,当目标是合作目标且控制系统正常工作时,需要考虑联合采用目标卫星和服务卫星的执行机构进行协同控制;当目标是非合作时,需要论证组合体控制系统的稳定性。另外,对于采用绳系捕获机构捕获形成的绳系卫星,需要研究其轨道机动控制技术。
4 结论
GEO卫星是未来在轨服务的主要对象,针对GEO卫星进行在轨服务操作,不仅可以获得显著的经济效益,而且在促进国防建设、空间技术的发展上具有重要意义。近年来,欧美等航天大国在GEO在轨服务方面开展了大量相关研究和关键技术研究试验,但总体而言GEO卫星在轨服务系统技术还处于初期发展阶段,与其相关的空间交会、目标监视测量、捕获连接、在轨服务机械臂和组合体动力学参数辨识及建模控制等关键技术还需深入研究和充分验证。随着这些技术的逐渐突破和成熟,在轨服务技术必将对未来GEO卫星设计理念及运营模式产生重大影响。
