航电系统高精度时间同步方案*
2014-03-05段求辉
段求辉
(中国西南电子技术研究所,成都 610036)
1 引言
传统战斗机的航电系统采用联合式结构,各设备独立运行,设备与设备之间主要通过总线(如1553B)实现信息交互,由于整个系统耦合较为松散,对时间同步的需求主要体现在软件调度以及消息传输超时处理等方面,对时间精度的要求比较低,一般在毫秒量级即可满足需求。随着航电系统高度综合化,战斗机的使用也朝着多用途、体系作战等方面发展,时间同步的对象范围从单平台设备之间扩大到编队内飞机平台以及编队外其他平台,时间同步精度需求也从以往的毫秒量级提高到微秒乃至纳秒量级。
目前关于航电系统时间同步研究主要局限于单平台内部航电系统的时间同步,并且大部分是基于计算机网络时间同步的方法和原理来实现的,如文献[1]中提到的基于航电总线控制器周期广播时间的方式,其同步精度也在毫秒量级;程春姬[2]提出的适合IMA系统时间管理技术,其同步精度在1~10ms;冯彬[3]提出的IMA系统时间同步方法,其同步精度也只能到25 μs。上述文献采用的方法局限于飞机平台内部,时间同步精度无法满足日益提高的各种测量和同步需求。本文针对现代先进战机航电系统资源高度共享以及编队协同探测对高精度时间同步的需求,提出了航电系统时间中心的概念,结合卫星和数据链授时、同步的原理,从工程实现的角度出发,提出了一种兼顾飞机平台内部和外部时间统一的设计,实现了飞机航电时间和编队时间的高精度对准,并对同步误差进行了分析。
2 航电系统时间同步设计
2.1 航电系统时间中心
本文定义的时间中心是整个航电系统的时间基准,主要完成基准钟面时间的产生、保持和分发,以及飞机平台内外时间的时差测量等功能,其功能组成如图1所示。
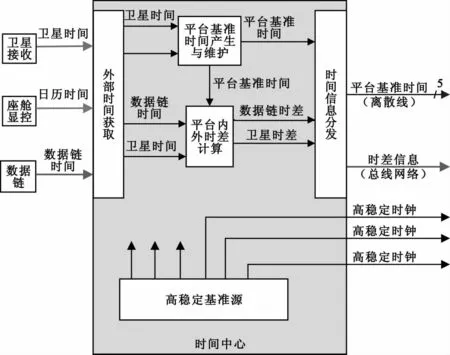
图1 时间中心功能组成Fig.1 The funtion of time processing center
整个时间中心包括时间基准外溯源、平台基准时间产生与维持、平台内外时差测量、时间信息分发以及高稳定时钟产生共5部分功能。
时间基准外溯源功能主要完成外部时间的获取和传递,所获取的时间主要有两个用途,一是用作本平台基准时间的初始时刻,即基准时间的外溯源;二是用于本平台时间和外部时间的比较和同步。该功能所获取的外部时间主要包括卫星时间、日历时间和数据链时间,由于不同外部时间源的发布精度和传递误差存在差异,相应的接收电路的抗干扰能力也存在差异,因此在进行时间基准外溯源时,需要考虑建立有效的等级机制,合理选择外部时间源用于本机平台的对时和同步。在所有外部时间源中,卫星时间主要包括两种,分别为“北斗二代”(BD-2)时间和 GPS时间,两者本质上都是一种原子时(TAI),覆盖范围广,授时精度高,可以作为平台基准时间的外溯源以及平台之间时间对准的手段。其中BD-2时间使用稳定可靠,是理想的首选外部时间源。而GPS时间的覆盖范围更为宽广,并且在目前军用和民用系统中,其应用范围和接受程度是最好的,因此在和平时期可以用做备用外部时间源。数据链时间的精度和覆盖范围与具体数据链类型密切相关,并且数据链时间的时效性远远短于卫星时间,因此一般只用做相对平台之间时间对准,不作为平台基准时间的外溯源。日历时间本质上是飞行员手动设置的时间,主要在系统初始上电无法自动将时间外溯源到卫星时间时,用于本平台基准时间初始时刻的设置。
平台基准时间产生与维持功能主要产生和维持本飞机平台的时间基准。该功能从本平台初始计时时刻开始,利用高稳定频率源提供的高稳定时钟,产生和输出高精度的基准时间信息以及对时脉冲。该功能采用硬件电路产生符合IRIG-B码规范要求的B(DC)同步信号,该信号可同时承载平台基准时间信息和1PPS对时脉冲。
平台内外时差测量功能通过定期检测本平台基准时间与平台外部时间之间的差值,使得本平台时间与外部时间可以进行准确的转换,从而实现不同平台之间基准时间对准的目的。现有的基于延迟线插入的测量原理可以在一片很小的数字芯片中利用门延时技术达到测量精度优于1 ns的测量性能。
时间信息分发功能对外分发时差信息和平台基准时间同步信息。其中时差信息的分发通过航电总线网络来完成,平台基准时间信息和时间同步脉冲通过RS485离散线以IRIG-B码的形式分发。
高稳定基准源为时间中心提供高稳定的时钟频率基准,该时钟用于平台基准时间的保持和维护,同时也可以用于为航电系统内部其他设备终端提供高稳定度的计时参考,实现整个航电系统高精度共时间运行。高稳定频率源的选择主要考虑频率准确度、稳定度和老化等特性。目前常用的高稳定频率源主要有晶体振荡器和原子钟两大类,由于原子能级跃迁频率是原子的固有特性,受外界环境影响很小,因此原子钟相对于晶体振荡器而言具有频率准确度高、长期抗老化特性好的特点,因此其守时的精度会更高。表1给出了典型铷原子钟和恒温晶在振动环境下的性能参数。
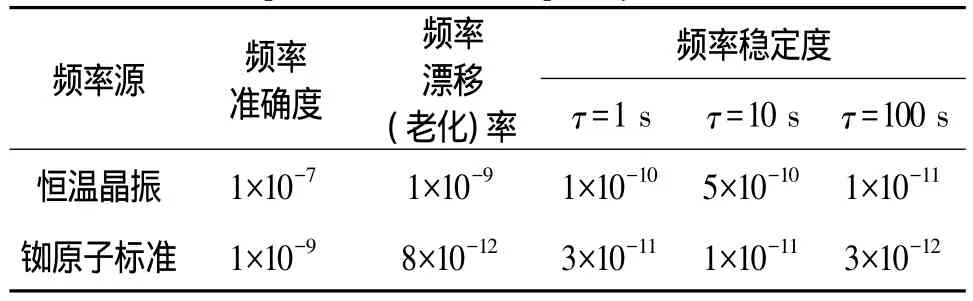
表1 频率源性能对比Table 1 The performance of frequency reference sources
2.2 飞机平台内部时间同步
飞机平台内部各航电设备之间时间同步分层完成,如图2所示,其中时间中心作为一级钟,产生和维持本平台的基准时间,对具有高精度计时需求的航电设备进行时间同步。具有高精度时间保持功能的航电设备作为二级钟,二级钟对具有低精度计时需求的航电设备(三级钟)进行时间同步,二级钟本身的基准时间由时间中心直接进行同步。
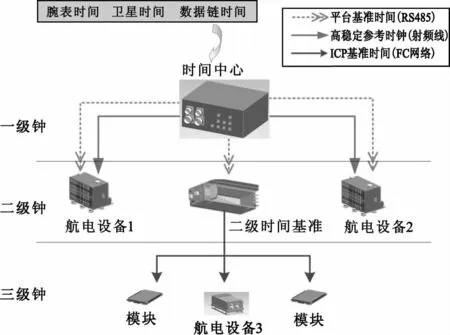
图2 时间同步过程Fig.2 The process of time synchronization
时间中心和航电设备(二级钟)之间的时间同步主要通过RS458离散线来完成基准时间的传递。时间中心的时间信息分发功能通过RS485离散线将基准时间信息分发给各航电设备,该信息采用IRIG-B码格式每秒发布一次,内部包含准时点(对时标志)和天、时、分、秒等信息。考虑到基准时间信息从时间中心到各航电设备的传输过程会带来器件时延和电缆时延,当传输距离达到100m时,基准时间信息的传输时延将达到333 ns,严重影响航电设备和时间中心之间的时间对准精度。因此,具体设计时需要标定每路信息分发传输的时延,然后根据标定后的延迟量在时间中心进行基准时间信息超前修正。按目前的技术水平,时间延迟的补偿精度可以优于1 ns。对于某些需要高精度守时的航电设备,例如具有高精度测量、定位能力的射频传感器设备,时间中心还为其提供高稳定计时时钟,以保证其计时精度。
二级钟设备作为飞机平台的三级钟的时间基准,主要为各航电计算机(如数据处理计算机、任务计算机、显控计算机等)提供同步时间服务。二级钟和各三级钟节点之间主要通过航电总线网络完成同步信息的传递,采用基于计算机网络时间同步的方法和原理来实现时间同步,同步精度一般在微秒量级。以综合模块化航空电子系统(IMA)时间同步为例,文献[3]给出的同步精度为25 μs。
2.3 飞机对外时间同步
飞机航电与平台外部其他设备的时间同步主要通过两个步骤来完成:首先利用特定航电设备周期获取外部时间基准信息,实现和外部时间基准准确对时;然后周期计算本平台基准时间与外部基准时间之间的时差并在本平台航电系统内分发。当飞机平台与外部其他平台使用相同的外部时基信息计算时差时,飞机平台内部的航电设备可以利用该时差信息以及本平台基准时间信息换算得到统一的外部时间,从而达到不同平台设备之间时间参考统一的目的。
飞机平台常用的平台间对时手段主要有两个,一是利用卫星接收机实现和卫星对时,二是利用数据链端机实现和数据链时基之间的对时。本文建议的卫星授时采用文献[4]中提出的单向对时法进行对时,即用户设备不发射信号,只接收卫星的时间信息及同步信号,通过估测并扣除设备与卫星之间伪距时延来实现设备与卫星的时间同步。该方法能够充分利用卫星授时的广域特性,快速便捷地实现不同平台之间的时间同步。目前采用单向对时法进行时间同步,无论对时卫星是GPS还是“北斗”,静态对时的精度可优于50ns[5],在飞行动态环境下的对时精度可达到 200ns[6]。
跨飞机平台之间对时的另外一个手段是利用战术数据链,目前战术数据链普遍采用时分多址(TDMA)接入方式,典型代表有联合战术信息分发系统(JTIDS/Link16)。JTIDS/Link16的高精度对时是采用双向时间传递来完成的,参与对时的长机和僚机通过微波链路交换彼此的对时信号,当双向传输的微波链路是对称的或者是近似对称的,则对时信号的传输延迟误差可对消,因此可实现高精度的时差测量。双向时间传递原理如图3所示。
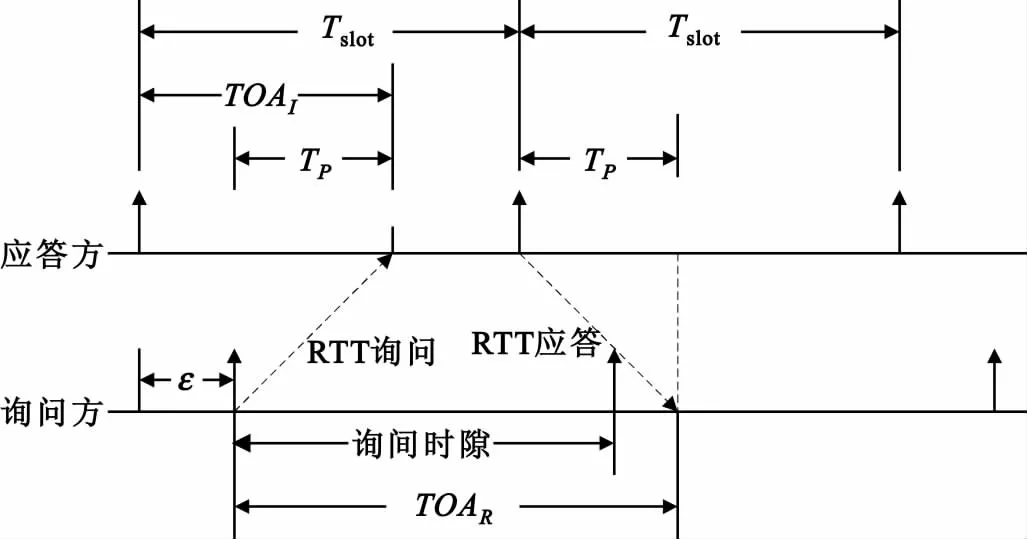
图3 双向时间传递原理Fig.3 Theory of two-way time transfer
考虑利用数据链的两个相邻时隙实现对时,图中长机作为对时应答方,僚机为对时询问方;TOAI是长机确定的对时询问消息的到达时间,TOAR为僚机确定的对时应答消息的到达时间;Tp为对时消息的传播时间,对于对时询问和对时应答的传播时间,假设相同;ε为长机和僚机之间的钟差;Tslot为询问或应答时隙。则有

式中,TI为 僚机询问消息到达时间TOAI,TR为长机应答消息达时间TOAR,Ts为询问或应答时隙Tslot。
若考虑两架飞机平台的相对运动和两套数据链端机收发通路延时的不一致性,图3中的两个TP并不绝对相等,因此ε的测量结果将会引入误差。目前已知的JTIDS数据链在飞机动态飞行过程中实现的对时精度可以优于 100ns[7]。
3 误差分析
3.1 平台内部时间同步误差
平台内部时间同步误差主要考虑一级钟和二级钟之间的高精度对时误差,根据误差理论和误差性质,可以将引起时间同步误差的因素分为常值误差(t0)、线性变化误差(kt)和随机变化误差(ζ(t))三类,因此时间同步误差可用以下公式表示:

常值误差和线性误差可采取一定补偿措施,而随机误差则不便补偿。另一方面,常值误差和线性误差补偿之后仍有残差,此时时间同步误差公式变为

根据误差合成原理,平台内部时间同步总误差为

在平台内部,采用离散线连接的方式实现时间中心与各用时设备之间的对时与同步,时间同步误差主要来自时码信号的分发环节,时码信号到达各用时设备需要经过传输路径上的器件延迟、电缆延迟。为保证各用时节点接收到的时间与时间中心的基准时间高度同步,需要对不同传输路径的硬件延迟进行标定,在时码信号传输时进行超前修正。对于路径长度造成的时滞,可以视为常值偏差,通过标定可以给予补偿,但标定和补偿本身会引入误差。此外,传输路径上器件还会因温度变化而引入温度漂移误差,该误差无法通过预先标校得到补偿。因此,平台内部时间同步的主要误差因素包括三部分:时延标定引起的误差、时延补偿引起的误差以及温度漂移引起的误差。
由于时延标定其原理是测量信号在两个标定点之间的传输时间,因此标定精度主要取决于标定点位置选择以及标定仪器测量误差。考虑在实际工程中标定点的位置无法保证选择到理想位置,再加上标定过程选择的测试电缆也会引入误差,一般可假设标定误差长度为1 m,即3.3 ns。另一方面,现今的标定仪器(例如安捷伦53132A),其时延测量精度可以达到100ps量级,因此仪器测量误差可忽略不计。
时延补偿误差方面,如前所述,目前的器件水平可以控制信号传输时延精确到皮秒量级,因此一般可保证时延补偿误差优于1 ns。
造成温度漂移误差的原因是因为现在大部分器件都是采用半导体器件,具有热敏特性,即器件时延特性会随温度变化而变化,目前RS485电平的接口芯片温度漂移一般为几纳秒,以SN65LBC174A为例,其温度漂移造成的时延变化为1.5 ns。
因此,整个飞机平台内部,一级钟和二级钟之间的高精度时间同步误差可达到

3.2 编队时间同步误差
与平台内部时间同步系统不同,编队之间设备的高精度时间同步需要在设备不共用同一个高稳定度时钟的条件下实现,因此编队时间同步误差需要同时考虑平台之间的对时误差σD和各平台内部守时误差σS。根据误差合成原理,编队时间同步的总误差可以采用以下公式计算:

其中,对时误差σD主要包括三部分误差,分别为编队飞机之间对时误差、每架飞机平台内部时间同步误差以及飞机平台内外时间差的测量误差。若飞机平台采用数据链对时,以100ns误差为例,先前计算的飞机平台内部时间同步误差为3.7 ns,基于高精度门延迟技术可实现1 ns的平台内外时间差测量误差,因此对时误差的精度可达到

各平台内部守时误差σS则与编队时间同步执行周期T以及平台内部时间中心采用的高稳定计时频率源的频率特性有关,使用以下公式计算:

其中,T为时间同步执行周期,A为频率源准确度,D为频率源漂移率(老化率),f1为频率源稳定度。
考虑数据链对时周期一般小于1 s,在此时间尺度内,频率稳定度以及短期频率漂移(老化)率对σS的影响很小,可以忽略,因此主要考虑频率源准确度的影响。从表1数据可以看出,以1 s为编队对时周期,当采用恒温晶振作为高稳定频率源时,各平台内部守时误差σS为100ns;当采用铷原子钟作为高稳定频率源时,各平台内部守时误差σS为1 ns。表2给出了采用不同的编队时间同步手段,以及不同的高稳定频率源时飞机编队的时间同步误差。

表2 编队时间同步误差Table 1 Time synchronization error of the formation of aircraft
4 结束语
本文针对现代先进战机多用途、体系作战等特点,提出了一种飞机平台内外时间同步的综合化设计方案,目前尚未在公开发表的文献中发现有类似解决方案。该方法采用“飞机时间中心”的设计思路,结合飞机现有的平台间对时手段,既可以保证飞机平台内部时间的单调连续,不受外部时间基准的影响,又可以灵活选择对外时间同步手段,同一架飞机甚至可以选择多个外部时基同时和多个外部平台分别进行时间同步。对同步误差的分析表明,该方案可以保证平台内部时间同步精度优于5 ns,平台间的时间同步精度达到100~245 ns。该方案实现原理简单,容易工程化,可以快速应用于综合化航电系统的高精度时间同步设计。
此外,本文方案给出的性能指标是在静态条件下计算得到的指标性能,在飞机飞行过程中获得的同步指标性能会有一定的恶化,具体恶化程度与可获得的基准源性能、数据链性能以及卫星同步性能密切相关,需要在工程实际中加以考虑。
[1]王世奎.航空电子通信系统关键技术问题的浅析[J].航空计算技术,2001,31(4):36-39.WANG Shi- kui.The Superficial Analysis of the Key Technology Problems[J].Aeronautical Computing Technique,2001,31(4):36-39.(in Chinese)
[2]程春姬.综合模块化航电系统时间管理技术[J].航空电子技术,2010,41(1):17-21.(in Chinese)CHENG Chun-ji.Time Management Technique of Integrated Modular Avionics[J].Avionics Technology,2010,41(1):17-21.(in Chinese)
[3]冯彬.一种综合模块化航空电子系统时间同步方法[J].电讯技术,2011,51(3):102-105.FENG Bin.A Time Synchronization Method for Integrated Modular Avionics System[J].Telecommunication Engineering,2011,51(3):102-105.(in Chinese)
[4]党晓圆.卫星授时校频系统研究[D].长沙:湖南大学,2009.DANG Xiao-yuan.Research on Satellite Timing and Frequency Calibration System[D].Changsha:Hunan University,2009.(in Chinese)
[5]尚红娟.时间频率同步的优化控制方法研究[D].西安:西安科技大学,2010.SHANG Hong-juan.Research of Optimal Control Method of Time and Frequency Synchronization[D].Xi'an:Xi'an University of Science and Technology,2010.(in Chinese)
[6]吴德伟.航空无线电导航系统[M].北京:电子工业出版社,2010:104-105.WU De-wei.Aviation Radio navigation system [M ].Beijing:Publishing House of Electronics Industry,2010:104-105(in Chinese)
[7]梅文华,蔡善法.JTIDS/Link16数据链[M].北京:国防工业出版社,2007:112-113.MEI Wen-hua,CAI Shan-fa.JTIDS/Link16 Data Link[M].Beijing:National Defense Industry Press,2007:112-113.(in Chinese)