一种半挂汽车列车外摆值的计算方法
2014-02-28单颖春刘献栋张红卫董金松
段 斌,单颖春,刘献栋,张红卫,董金松
(1.北京航空航天大学 交通科学与工程学院,北京 100191;2.交通运输部公路科学研究院,北京 100088)
0 引 言
半挂汽车列车是物流行业主要的运输工具,如在欧盟陆路范围内,74%的货物运输是由半挂汽车列车来完成的,并且汽车列车总长度可达18.5 m[1]。西方国家很早就开始进行甩挂运输研究,1970年 P. M. Leucht[2]对半挂汽车列车弯道制动进行了研究;在仿真分析方面,C. C. Macadam[3]提出了一种最优预瞄控制的驾驶员模型,并进行车辆闭环驾驶仿真;H. Peng[4]提出一种最优预瞄控制算法;TruckSim工程软件引入了这一模型,根据最优控制理论建立了车辆仿真方向盘控制模块和驾驶员闭环控制模块[5-6]。
通过性是半挂汽车列车的一个重要性能,通过性的指标包括最小转弯半径、转弯通道宽度、外摆值等[7-9],它们直接影响着汽车列车行驶的通过性和安全性,牛建峰,等[10]研究了山区公路紧急避险车道驶入角研究。组成汽车列车的牵引车和半挂车是两个牌照,用户可自由选择组成列车[11]。外摆值过大会影响半挂汽车列车的转弯机动性能,尤其是在狭小的空间,甚至会侵入其它车道,影响行车安全。GB 1589—2004《道路车辆外廓尺寸、轴荷及质量限值》(以下简称《限值》)对汽车列车外摆值的限值进行了明确的规定[8],准确计算汽车列车的外摆值对于用户选择半挂汽车列车匹配具有重要的参考意义,对汽车生产企业和汽车行业的发展都可以提供重要的技术支持。
目前国内有两个国家标准对外摆值做出规定。在《限值》中,规定汽车和汽车列车(不计具有作业功能的专用装置的突出部分)必须能在同一个车辆通道圆内通过,车辆通道圆的外圆直径D1为25.00 m,车辆通道圆的内圆直径D2为10.60 m。汽车和汽车列车由直线行驶过渡到上述圆周运动时,任何部分超出直线行驶时的车辆外侧面垂直面的值(车辆外摆值)T不得大于0.80 m(图1)。

图1 GB 1589—2004测量方法示意Fig.1 Measurement in GB 1589—2004
在《限值》和GB/T 12540—2009《汽车最小转弯直径、最小转弯通道圆直径和外摆值测量方法》(以下简称《方法》)中均规定了汽车列车外摆值的试验方法。不同的是,在《限值》中规定汽车列车起步后由直线行驶过渡到直径为25 m的圆上,而在《方法》中规定汽车列车以保持预定转角状态在圆内行驶[9]。欧洲标准70/311/EEC《关于各成员国汽车及其挂车转向机构的相关法律》有不同的规定[12]。经文献检索,目前尚未有明确的外摆值数值计算方法。
笔者基于半挂汽车列车在转弯通道圆内转弯过程的作图法,在《方法》规定的实验方法的基础上,提出了根据汽车列车的外形尺寸确定外摆值的理论计算方法,推导出具体的计算公式;之后,研究了汽车列车不同的参数对外摆值的影响关系;笔者还利用TruckSim软件对汽车列车进行运动学建模和仿真分析,将仿真计算得到的外摆值和文中算法得到外摆值进行比较,验证了文中所提出的计算方法的正确性。实车测试的结果也验证了文中算法的正确性。笔者工作对汽车列车的匹配研究提供了重要的参考依据。
1 半挂汽车列车外摆值计算方法
建立惯性坐标系XOY(图2),设半挂车最后外点为A点,后轴中心线中点为B点,牵引销位置为o点,半挂车纵向中心线与X轴夹角为α,于是A点在坐标XOY中可以表示如式(1)、式(2)。
XA=Xo+ cos (α)(-L)-sin(α)M
(1)
YA=Yo+ sin(α)(-L)+ cos (α)M
(2)
式中:L,M分别是A点在半挂车上相对于牵引销的纵向和横向的距离。

图2 汽车列车转向分析Fig.2 Analysis of combination vehicles’ turn
计算原理:将转弯过程分成dc次,每次引销的位置o的轨迹绕着转弯中心转dd°,根据《限值》要求,至少在圆周内行驶1/2圈(半个圆周),笔者在计算过程中dc和dd满足关系:dd×dc=π。
根据汽车列车转弯过程的作图方法可知[13],转弯时B点在i+1时刻位置的确定方法如下:以i+1时刻牵引销的位置oi+1点为圆心、半挂车轴距L2为半径画一个圆弧,该圆弧与i时刻挂车纵向中心线的交点即近似为i+1时刻点B的位置,进而可知i+1时刻半挂车纵向中心线与X轴的夹角αi+1,再根据式(1)和式(2)确定i+1时刻A点的位置。按照这种方法持续进行下去,即可得到A点的轨迹,进一步即可求出外摆值。
基于本计算原理,具体的实现过程如下:设第i时刻牵引销o点在坐标系XOY中的坐标为(Xoi,Yoi),则第i时刻半挂车后轴线中点的坐标为:
XBi=Xoi+ cos (αi)(-L)
(3)
YBi=Yoi+ sin (αi) (-L)
(4)
此时挂车纵向中心线的方程为:
YB(i+1)=(XB(i+1)-Xoi)tan (αi)+Yoi
(5)
在第i+1时刻,牵引销的坐标为(Xo(i+1),Yo(i+1)),那么以第i+1时刻牵引销的位置点为圆心、半挂车轴距L2为半径的圆的方程为:
(6)
式(5)、式(6)两个方程联合求解,即可得到i+1时刻B点的位置坐标XB(i+1),YB(i+1)。连接o(i+1),B(i+1),即可得到i+1时刻半挂车纵向轴线;其与X轴夹角用式(7)计算:
(7)
根据式(1)、式(2)可得到A点的坐标为:
XA(i+1)=Xo(i+1)+cos (α(i+1)) (-L) -
sin (α(i+1))M
(8)
YA(i+1)=Xo(i+1)+sin (α(i+1)) (-L) -
cos (α(i+1))M
(9)
重复以上过程,就可以逐步得到A点在i+2,i+3,…时刻的坐标,进而得到A点的轨迹,在此基础上便可求出外摆值。
在上述的迭代计算过程中,首先要确定初始状态的情况,如图3。
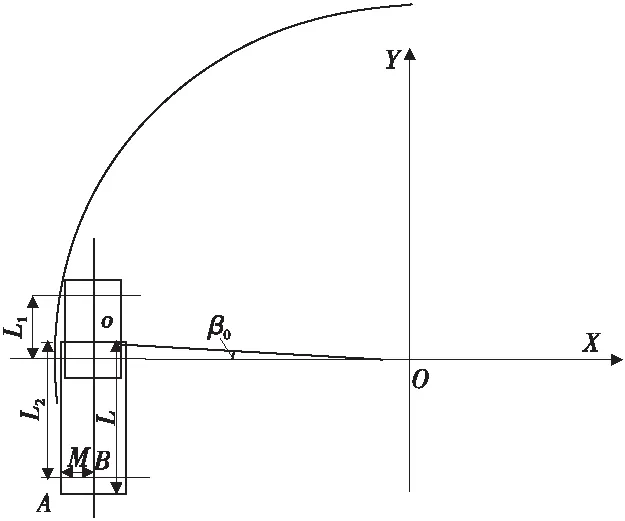
图3 汽车列车转向初始状态Fig.3 Initial state of combination vehicles’ turn
按照《方法》,初始状态下汽车列车后轴中线与坐标系XOY的X轴重合,前轮处于合适转向位置以保证在转向过程中牵引车左前最外侧正好沿着直径为25 m的圆弧,在转弯过程中,转向轮的转向角保持不变。初始状态下,坐标系XOY的O点与牵引销o点的连线与X轴的夹角为β0,β0可通过汽车列车的外廓尺寸计算得出。牵引销o点到转向中心O点的距离S也可计算得出,且在列车转弯过程中保持不变。算法流程如图4。
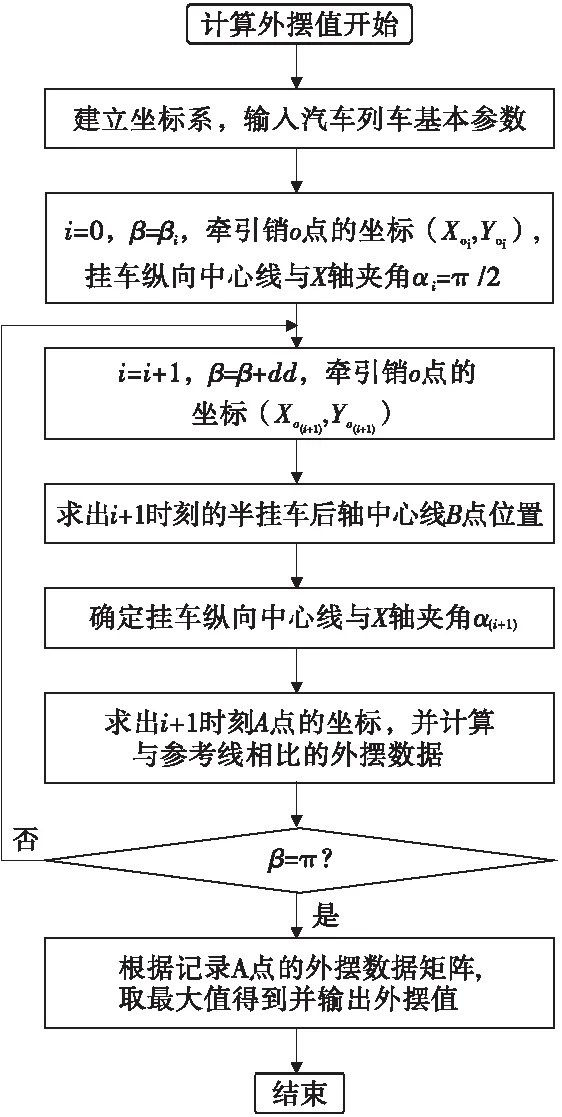
图4 算法流程Fig.4 Algorithm flow chart
2 外摆值实例计算分析
2.1 利用笔者提出的算法进行计算
以某牵引车和某半挂车进行匹配,在中国人民解放军总装备部定远试验场进行了实际测试。笔者对实验车辆使用文中的计算方法进行分析。算例中应用的具体数据如表1。

表1 计算数据Table 1 Parameters of combination vehicles /m
根据以上理论的分析和具体数据,进行编程计算得到汽车列车的外摆值为0.275 1 m,这个计算结果是符合《限值》对外摆值的限值要求的(注:此计算结果是按照每次0.1°迭代计算得到的)。
文中计算方法是根据作图法推导出来的,按照不同的迭代步长计算得到的结果不一样。由表2可以看出,随着迭代步长的减小,计算得出的外摆值也在不断减小。可想而知,当迭代步长无限小的时候,得到的计算结果就可以和真实解无限接近。笔者采用0.1°迭代步长。
表2不同迭代步长下的外摆值
Table2Outvaluesofdifferentiterationsteplengths

迭代步长/(°)外摆值/m迭代步长/(°)外摆值/m300.589530.3279200.518910.2914100.44870.10.275150.3614
2.2 外摆值随参数变化的规律研究
在欧美发达国家,以牵引车拖带挂车组成的半挂汽车列车的运输量占到总运输量的近80%。目前我国牵引车与挂车比达到4∶5[14],但与世界发达国家1∶2.5[15]以上的标准仍有较大差距。牵引车和半挂车的参数设置对半挂汽车列车的通过性都有影响。
为了分析前置距变化对外摆值的影响,对前置距E从0.8 m变化到1.5 m(步长为0.1 m)分别进行外摆值计算,得到外摆值随前置距E的变化曲线。同样,对牵引车的轴距L1、半挂车轴距L2取不同的数进行计算并得到相应的变化曲线。外摆值变化曲线见图5。

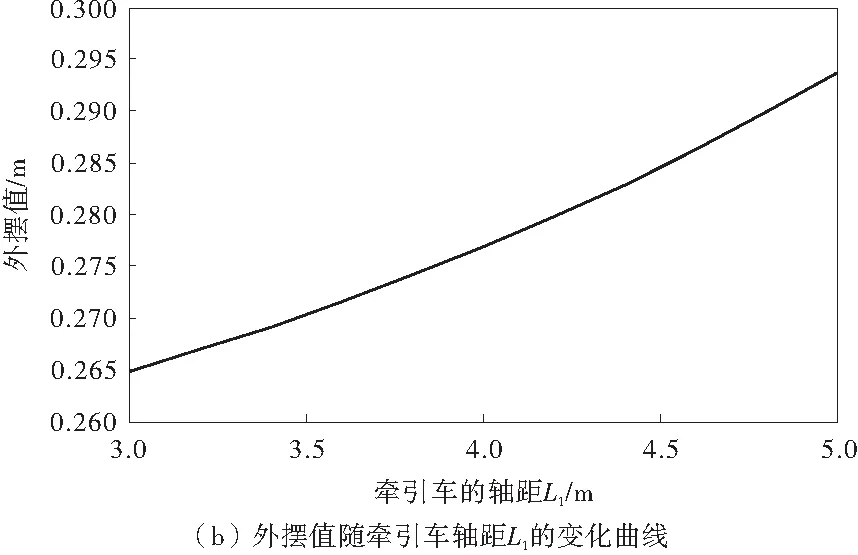

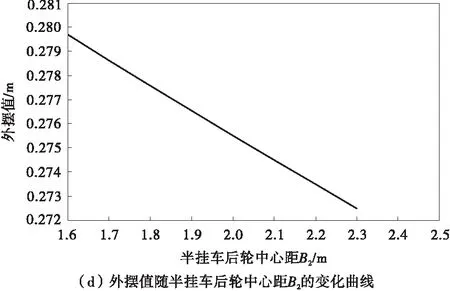
图5 外摆值变化曲线Fig.5 Curve of out value change
由图5可以看出,汽车列车的外摆值随着前置距的增大,呈现增大的趋势;随着牵引车轴距的增大,呈现单调增大的趋势;而随着半挂车轴距L2的增大,汽车列车的外摆值呈现减小的趋势;随半挂车后轮中心距B2的增加也呈现减小的趋势。前置距E、牵引车轴距L1、半挂车后轮中心距B2等对外摆值影响较小,而半挂车轴距L2的影响相对较大。同时,外摆值在参数变化范围内均远小于0.8 m的国标要求。
3 外摆值计算方法的验证
3.1 使用TruckSim工程软件进行仿真验证
将半挂汽车列车实际数据在TruckSim仿真软件中输入进行建模,根据《限值》给定的汽车列车运行轨迹,并在模型中安装测试半挂汽车列车最后外点的位移传感器,可根据其位移曲线计算外摆值的数值。根据TruckSim的仿真动画和曲线也可以明显地看出汽车列车在转弯时的运动趋势。图6为TruckSim仿真运行的动画截图。图7为TruckSim仿真运行计算得到的汽车列车最后外点的轨迹。

图6 TruckSim仿真运行的动画截图Fig.6 Screenshot of animation

图7 汽车列车最后外点的轨迹Fig.7 Track of last and outermost point of combination vehicle
笔者计算汽车列车外摆值是依据轨迹侧向坐标数据,在图7中也可以看出轨迹侧向坐标从0时刻起有一个先下降再上升的过程,从而可以依据曲线的坐标计算外摆值。
在TruckSim中,将仿真得到的数据(图7)导出,并将汽车列车最后外点外摆最大时刻对应的坐标值与0时刻对应的坐标值相减,即可得到汽车列车的外摆值。将表1的实验车辆数据输入模型,通过仿真得到外摆值的计算结果为0.307 361 m,通过文中算法计算得到的外摆值是0.275 1 m,误差较小,算法正确。
通过改变汽车列车某参数,可以得到改变参数后的一系列外摆值数据(表3~表5),由此可以画图观察外摆值随该参数的变化趋势(图8)。笔者针对汽车列车外摆值E、牵引车轴距L1、半挂车轴距L2的变化进行仿真,得到了外摆值随这些参数变化的曲线,并与通过笔者提出的算法计算得到的变化曲线进行比较,验证算法的正确性。

表3 不同的前置距E对应的外摆值Table 3 Out values of different fifth wheel leads /m
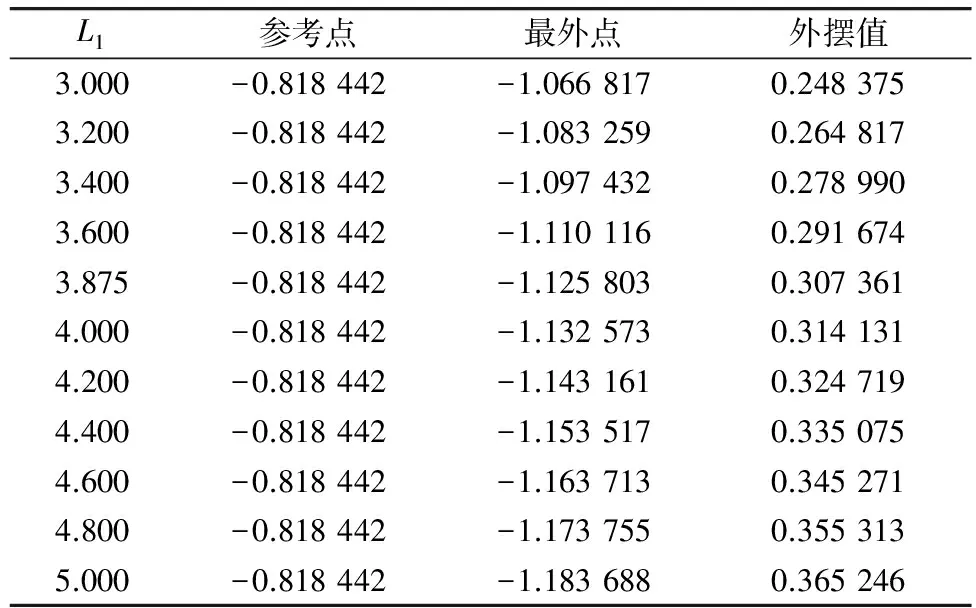
表4 不同的牵引车轴距L1对应的外摆值Table 4 Out values of different tractor wheel bases /m

表5 不同的半挂车轴距L2对应的外摆值Table 5 Out values of different semitrailer axle bases /m



图8 外摆值变化曲线对比Fig.8 Comparison of out value change curves
由图8可以看出,通过计算和仿真得到的汽车列车外摆值随前置距E、牵引车轴距L1、半挂车轴距L2的变化趋势是相同的,且文中方法所得结果与TruckSim仿真结果非常相近,可以看出笔者提出的外摆值算法得到了很好的验证。
3.2 实车测试验证
利用南京智真电子科技有限公司开发的基于视觉的汽车列车行驶轨迹测试仪,将文中进行计算和仿真的半挂汽车列车在中国人民解放军总装备部定远试验场进行了实际测试。
本方法先在地面上绘制5条标识线,同时隔一定的距离绘制一条垂直于标识线的横向线,如图9。通过触发使摄像机开始采集形成视频,并通过图像上横向线与标识线的交点,求出图像中点在地面上的实际位置。

图9 汽车列车行驶轨迹测量铺设参照图像Fig.9 Reference for measuring traveling track
按照《限值》规定的测试方法,利用该测试仪对半挂汽车列车的原始状态和最后外侧点的轨迹进行记录,通过计算记录的数据得到外摆值,如图10。定远试验场进行的半挂汽车列车外摆值测试结果是0.285 m,通过文中算法计算得到的外摆值是0.275 1 m,误差为3.5%,误差很小,验证了本算法的正确性。

图10 汽车列车行驶轨迹测量试验Fig.10 Test of measuring traveling track
4 结 论
笔者提出了根据汽车列车的外形尺寸确定外摆值的计算方法,针对具体的实验车辆,利用该方法进行了外摆值的计算与分析,且通过TruckSim工程软件仿真和实车测试对该方法进行了验证,表明笔者所提计算方法结果准确、公式简洁、便于理解和工程实用,可为半挂汽车列车的通过性研究提供指导。经过笔者的计算、分析,可得出以下结论:
1)半挂汽车列车外摆值随前置距E、牵引车轴距L1、半挂车轴距L2、半挂车后轮中心距B2的变化趋势是,外摆值随前置距和牵引车轴距的增大而增大,随半挂车轴距、半挂车后轮中心距的增大而减小。
2)前置距和半挂车后轮距对半挂汽车列车外摆值的影响很小,牵引车轴距和半挂车轴距对半挂汽车列车外摆值的影响较大。
[1] European Commission.Road Transport Policy[R].Brussels:Commission of the European Communities,2006:2-3.
[2] Leucht P M.The directional dynamics of the commercial tractor-semitrailer vehicle during braking[J].TRB of the national academies,1970,71(3):242-254.
[3] Macadam C C.Application of an optimal preview control for simulation of closed-loop automobile driving[J].IEEE Transactions on Systems,Man and Cybernetics,1981,11(6):393-399 .
[4] Peng H.Optimal Preview Control for Vehicle Lateral Guidance[R].California,U.S.:Institute of Transportation Studies University of California at Berkeley,1991.
[5] Carsim.The vehiclesim steer controller[EB/OL].(2012-10-25) www.carsim.com.
[6] Dunn A L,Heydinger G,Rizzoni G,et al.In-depth analysis of the influence of high torque brakes on the jackknife stability of heavy trucks[J].Society of Automotive Engineers,2003,112(2):255-272 .
[7] 郭正康.现代汽车列车设计与使用[M] .北京:北京理工大学出版社,2006:114-116.
Guo Zhengkang.Design and Application of Modern Vehicle Combinations[M].Beijing:Beijing Institute of Technology Press,2006:114-116.
[8] GB 1589—2004 道路车辆外廓尺寸、轴荷及质量限值[S].北京:中国标准出版社,2004.
GB 1589—2004 Limits of Dimensions,Axle Load and Masses for Road Vehicles[S].Beijing:China Standards Press,2004.
[9] GB 12540—2009 汽车最小转弯直径、最小转弯通道圆直径和外摆值测量方法[S].北京:中国标准出版社,2009.
GB 12540—2009 Minimum Turning Circle Diameter,Minimum Turning Clearance Circle Diameter and Out Value Test Method for Motor Vehicles[S].Beijing:China Standards Press,2009.
[10] 牛建峰,王俊骅,董宪元.山区公路紧急避险车道驶入角研究[J].重庆交通大学学报:自然科学版,2010,29(4) :604-608.
Niu Jianfeng,Wang Junhua,Dong Xianyuan.Research on the angle to truck escape ramps of mountain roads[J].Journal of Chongqing Jiaotong University:Natural Sience,2010,29(4):604-608.
[11] 王增权,赵希望.论汽车列车的合理匹配 [J].商用汽车,2010(3):82-84.
Wang Zengquan,Zhao Xiwang.A thought and consideration over reasonable and ideal connection of tractor and trailer[J].Commercial Vehicles,2010(3):82-84.
[12] 70/311/EEC On the Approximation of the Laws of the Member States Relating to the Steering Equipment for Motor Vehicles and Their Trailers[S].[S.l.]:EEC Commission,1999.
[13] 何光里.汽车运用工程师手册[M].北京:人民交通出版社,1997:112-113.
He Guangli.Automobile Application Engineer’s Handbook[M].Beijing:China Communications Press,1997:112-113.
[14] 张红卫,王维.货运车辆安全研究与应用[J].物流技术与应用:货运车辆,2009(5):44-47.
Zhang Hongwei,Wang Wei.Freight vehicle safety research and application[J].Logistics Technology and Application:Freight Vehicles,2009(5):44-47.
[15] 罗茂堂.浅议甩挂运输行业的科学发展[J].科技创新导报,2008(32):216-217.
Luo Maotang.Discussion on the scientific development of hang dump the transportation industry[J].Science and Technology Innovation Herald,2008(32):216-217.
