APP下载
搜索
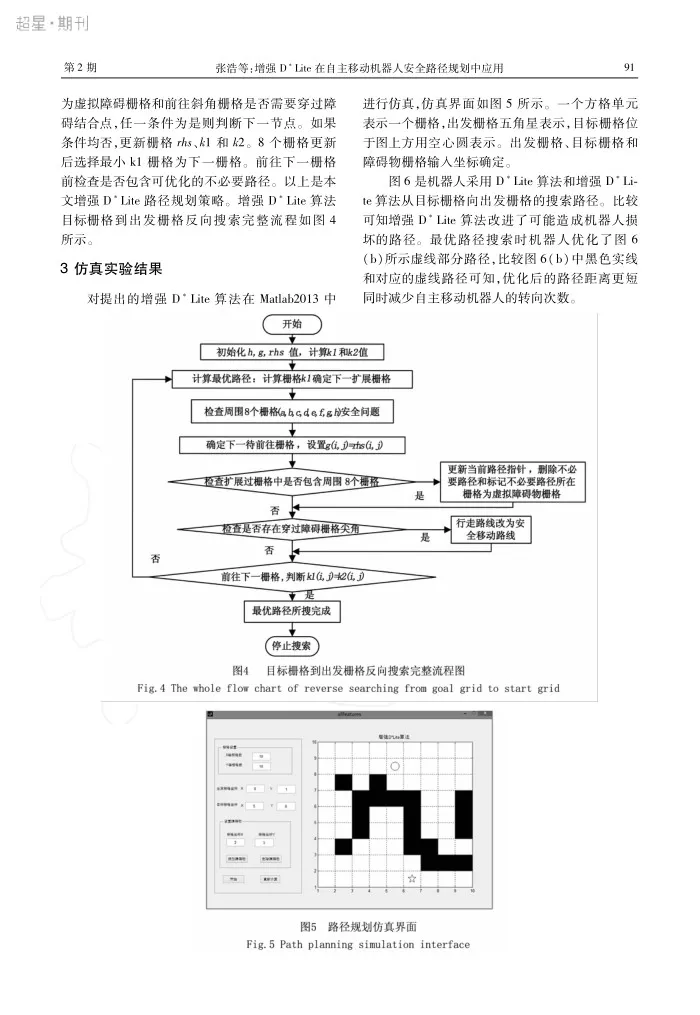
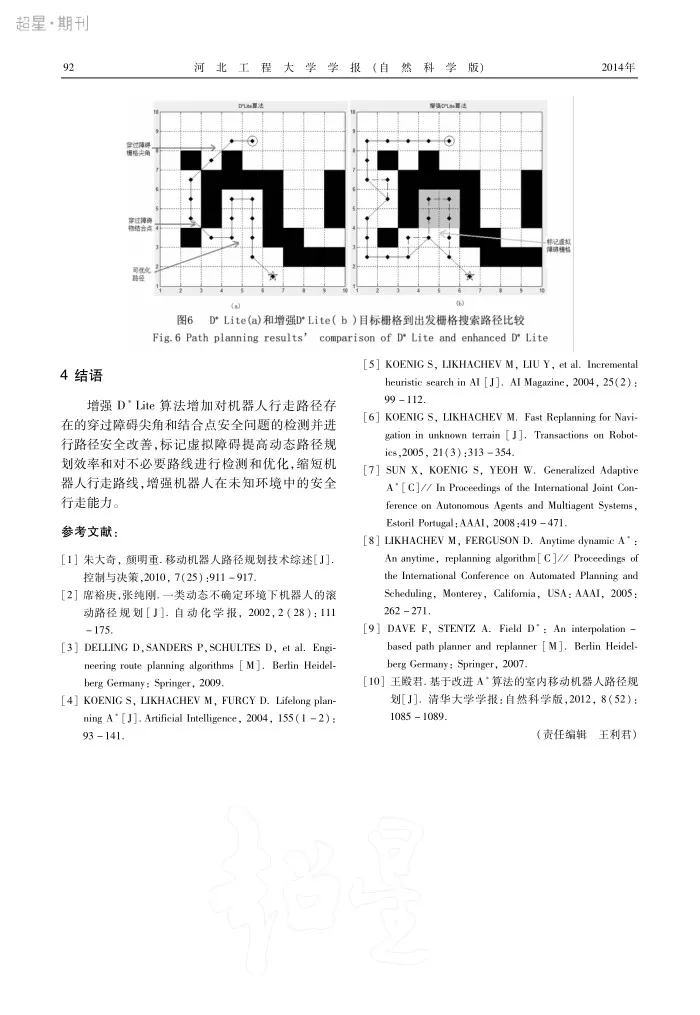
增强D*Lite在自主移动机器人安全路径规划中应用
2014-02-27
张浩,孙新柱
河北工程大学学报(自然科学版)
订阅
2014年2期
收藏
关键词:
移动机器人
规划
猜你喜欢
移动机器人
规划
移动机器人自主动态避障方法
移动机器人VSLAM和VISLAM技术综述
发挥人大在五年规划编制中的积极作用
规划引领把握未来
快递业十三五规划发布
基于Twincat的移动机器人制孔系统
多管齐下落实规划
十三五规划
迎接“十三五”规划
室内环境下移动机器人三维视觉SLAM
杂志排行
《师道·教研》
2024年10期
《思维与智慧·上半月》
2024年11期
《现代工业经济和信息化》
2024年2期
《微型小说月报》
2024年10期
《工业微生物》
2024年1期
《雪莲》
2024年9期
《世界博览》
2024年21期
《中小企业管理与科技》
2024年6期
《现代食品》
2024年4期
《卫生职业教育》
2024年10期
河北工程大学学报(自然科学版)
2014年2期
河北工程大学学报(自然科学版)
的其它文章
高土坝地震反应分析中阻尼矩阵建模问题的讨论
凤阳山矿区太原组和山西组煤质特征分析
一种改进的建设工程项目风险评价方法