驾驶员在真实交通危险工况中的制动反应时间
2014-02-27朱西产马志雄
李 霖,朱西产,马志雄
(同济大学汽车学院,上海 201804)
前言
当前汽车安全技术的研究重心正在由被动安全向主动安全转移。先进驾驶辅助系统(advanced driver assistance systems, ADAS)是现在汽车主动安全技术研究的热点。目前很多关于ADAS的研究及产品都属于纵向辅助系统,比如前碰撞预警系统(forward collision warning system, FCW)、自动紧急制动系统(autonomous emergency braking system, AEB)等。这类系统只考虑汽车纵向运动方向上的危险,在开发时必须考虑驾驶员的制动行为特征。以FCW为例,系统向驾驶员发出警告的时间必须足够早,以留给驾驶员充足的反应时间实施制动避免碰撞,但如果系统发出警告的时间过早,则会导致误报,干扰驾驶员正常行驶,使用户接受度降低。因此,驾驶员制动行为包括制动反应时间和制动输入特征是开发FCW的两个基本要素[1]。
目前已有不少关于驾驶员制动反应时间的研究[2-6],但由于测试信号和测试环境等的不同,得出的研究结果差异很大。同时,在开发先进驾驶辅助系统时,算法中所涉及的驾驶员反应时间应与真实交通环境中驾驶员的制动反应时间一致。但是,目前关于真实交通环境中的驾驶员制动反应时间的研究较少,大部分研究都是在特定的测试环境中,比如场地测试和驾驶模拟器测试,测试条件相对简单,考虑因素有限,驾驶员对实验环境中出现的危险有心理预期。这些测试环境与真实的驾驶环境有较大差异,因而研究成果不能直接应用于ADAS的开发。另外,不同国家和地区的驾驶员驾驶习惯不同,制动反应时间也会有差异,因此为开发适合我国特殊交通状况的先进驾驶辅助系统,必须研究我国驾驶员在真实交通环境中的制动反应时间。
本文中首先通过车辆行驶记录仪(video drive recorder, VDR)对上海市嘉定区的真实交通工况进行了采集,然后通过筛选和分类,得到典型的危险工况类型,最后对这些典型危险工况中驾驶员制动反应时间进行了提取和分析。
1 真实交通工况采集
出租车具有运营时间长,运行道路覆盖范围广等特点,因此特别适用于快速获取真实的交通工况数据。本文中通过在数辆出租车、警车和私家车上安装车辆行驶记录仪(VDR)对上海市嘉定区的真实驾驶场景进行了采集(图1)。VDR内置一个摄像头来记录车辆前方视野的道路交通影像和其他有关信息,如车辆速度、纵向加速度、侧向加速度等记录。本文中所用的VDR在纵向或侧向加速度绝对值大于0.4g时触发,只记录触发前15s和触发后5s的数据。
2 危险工况的获取和分类
通过VDR采集总共获得了约4 000例触发工况,经过仔细查看触发工况的视频录像,去掉没有任何碰撞危险的工况,最终得到了8例事故工况和1 200例危险工况。再通过主观评价对这1 200例危险工况按照危险程度进行分级,危险等级主要分为4级:0-危险预兆,1-轻微危险,2-一般危险,3-紧急危险。这里选取危险度为2级和3级的危险工况作为分析目标,共计430例。将这430例危险工况按照NHTSA提出的37类预碰撞场景分类方法[7]进行分类,从分类结果(图2)可以看出,最典型的6类危险工况共有303例,占所有430例危险工况的70%左右,这6类工况根据数量的多少按Ⅰ-Ⅵ排列,具体含义如图3所示。本文中利用这6类典型的危险工况来分析驾驶员的制动反应时间。
3 驾驶员制动反应时间提取
在这6类总共303例危险工况中,所有驾驶员都通过制动操作来避免碰撞,本文中通过对驾驶员的制动行为进行分析提取驾驶员制动反应时间。驾驶员制动反应时间定义为从出现碰撞危险到驾驶员开始制动操作所经历的时间。一般包括驾驶员识别危险并决定制动所需的大脑信息处理时间和驾驶员的脚离开加速踏板到接触制动踏板所需的运动时间。在有些研究中,制动器的响应时间也包含在内。
首先须确定碰撞危险出现的时刻,如何确定危险出现时刻是目前所有基于自然行驶工况的驾驶员制动反应时间研究所面临的难题。在这6类危险工况中,工况类型Ⅱ(前车减速)的危险出现时刻相对容易确定,定义为前车制动灯亮的时刻。其他5类工况中危险出现时刻定义为前方车辆开始导致碰撞危险的运动时刻。比如在工况类型Ⅰ中,危险出现时刻定义为本车侧前方自行车(摩托车)突然拐入本车行驶车道,或者本车前方被遮挡的自行车(摩托车)突然从遮挡物后窜出的时刻;工况类型Ⅲ中,危险出现时刻定义为本车在路口转向时车辆前方被遮挡的自行车(摩托车)从遮挡物后窜出,或者车辆前方的自行车(摩托车)突然改变运动状态(改变后的运动状态导致了危险的发生)的时刻;工况类型Ⅳ和Ⅵ中,危险开始时刻定义为车辆侧前方车辆开始向本车道转向或偏移的时刻;工况类型Ⅴ中,危险出现时刻定义为车辆前方行人开始横穿公路,或者被遮挡行人从遮挡物后窜出的时刻。如果无法直接判断危险开始时刻,则通过研究人员和拥有丰富驾驶经验的驾驶员共同进行主观评价确定,舍去无法直接判断危险开始时刻且主观评价结果差异很大的工况。
然后,通过车辆速度曲线(图4)确定驾驶员制动开始的时刻。对车辆速度曲线进行分段直线拟合,其中C-D段车辆速度急剧减小,因此可视为驾驶员的紧急制动过程,C点可视作驾驶员紧急制动起始时刻。实际上由于制动器响应带来的延迟,驾驶员开始制动的时刻应该比C点更早,但为分析方便,本文中也将制动器响应延迟时间视作驾驶员制动反应时间的一部分。
在驾驶员制动反应时间的提取过程中发现,有些工况下驾驶员的制动反应时间非常长。这主要有两个原因:一是在本文中定义的危险出现时刻时,一些驾驶员注意力不集中,未能及时识别到危险的出现;二是一些驾驶员虽然已经注意到危险,但认为不必立刻进行制动。这些工况中得出的数据不能作为驾驶员制动反应时间,因为这些数据的引入会导致最终结果方差过大,平均值偏高。从已有的文献可看出,几乎所有研究得出的驾驶员制动反应时间都小于2s,而本文中得出的结果也绝大部分在2s以下,因此只选驾驶员制动反应时间在2s以下的数据。
4 结果分析
最终得出的6种危险工况下驾驶员制动反应时间如图5所示,平均值分布在1.02~1.36s之间。从驾驶员制动反应时间的统计学参数(表1)可以看出,驾驶环境对驾驶员的制动反应时间有很大的影响,不同类型的危险工况下驾驶员制动反应时间有明显的差异。因此,无法得到一个适用于不同交通环境的标准制动反应时间,这点与文献[2]中的研究成果一致。
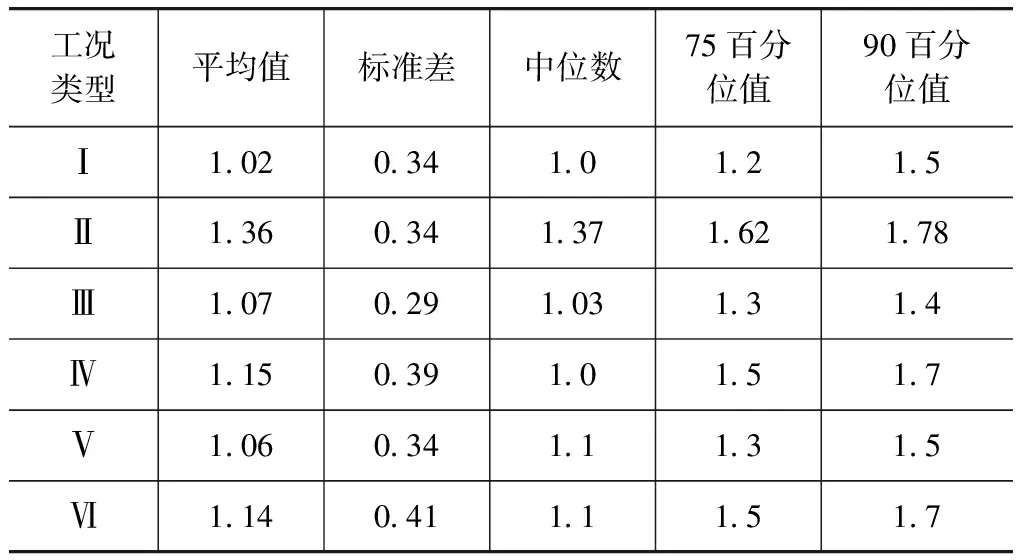
工况类型平均值标准差中位数75百分位值90百分位值Ⅰ102034101215Ⅱ136034137162178Ⅲ1070291031314Ⅳ115039101517Ⅴ106034111315Ⅵ114041111517
相比于由其他车辆导致的碰撞危险(工况Ⅱ、Ⅳ、Ⅵ),当危险是由行人或骑车人等易受伤害的道路使用者导致时(工况Ⅰ、Ⅲ、Ⅴ),驾驶员制动反应时间更短,这说明驾驶员对易受伤害的道路使用者更为警觉,在有危险出现时制动反应更快。
当碰撞危险都是由车辆引起时,相对于工况类型Ⅱ,在工况类型Ⅳ和Ⅵ中,碰撞危险更为明显。在工况类型Ⅱ中,在前车突然制动前碰撞危险都是潜在的,驾驶员并未对危险的出现有心理预期,因此当危险出现时,驾驶员通常需要更多的时间来判断交通环境并做出反应。
因为目前主流的纵向驾驶辅助系统,如FCW、AEB等,主要目的是避免追尾碰撞事故或减小追尾事故的严重程度,所以工况类型Ⅱ(前车减速)最受关注。下面对工况Ⅱ下的驾驶员制动反应时间做进一步分析。
根据文献[8]和文献[9]中的研究成果,驾驶员反应时间近似服从对数正态分布,本文中也对前车减速工况下驾驶员的制动反应时间做了对数正态分布拟合,结果如图6所示,拟合的效果较好,相关系数R=0.87。对数正态分布的拟合均值μ=1.387s,与算术均值1.36s接近。
驾驶员制动反应时间与速度的关系一直是研究的重点。但是,之前的研究并未达成共识。例如,文献[10]中论述当车速从40km/h升高到64km/h时,驾驶员对黄灯的制动反应时间缩短了0.5s。但是文献[11]中研究却发现速度对驾驶员反应时间没有影响。本文中对前车减速工况下驾驶员制动反应时间与车速的关系做了分析,结果表明驾驶员制动反应时间有随车速升高而降低的趋势(图7),两者之间的相关系数为-0.24,相关性并不很强,但具有一定的指示性,说明车速确实对驾驶员制动反应时间有一定影响。
本文研究发现,在前车减速工况下,当危险发生在路口时,驾驶员的平均制动反应时间比在非路口时长(图8)。在路口时的平均制动反应时间为1.367s,而在非路口时的平均制动反应时间为1.356s。这个结论与一些已有的研究结果相悖,因为一些研究人员认为,当车辆行驶在路口时,驾驶员通常对危险出现有一定的心理预期,因此当出现危险时制动得更快。例如文献[12]中通过驾驶员模拟器实验发现,无论有没有自动前碰撞预警系统,在路口时驾驶员的反应时间总比在直路时短。本文中通过对危险工况视频进行细致分析发现,在路口时交通环境相比于在非路口行驶时更为复杂,驾驶员必须花更多的注意力关注从侧面来的车辆或者其他道路使用者,加重了驾驶员的认知负荷。因此,当在路口遭遇前车突然减速时,驾驶员通常需要花费更多的反应时间进行制动。
根据文献[13]中的研究成果,碰撞危险紧急程度越高,驾驶员制动越快,制动反应时间越短。在实际应用中,TTC(time-to-collision)经常用来表征危险程度,TTC是指同一路径上的两辆车保持当前运动状态不变到发生碰撞所需要的时间,即两车相对距离除以两车相对速度。文献[14]中研究了驾驶员制动反应时间与TTC之间的关系,结果发现TTC越大,无论是平均制动反应时间还是制动反应时间的标准差都越大。但是,在前车减速工况中,前车开始制动时的TTC值分布范围很大。这是因为在跟车情况下,相对速度可能很小,因而TTC可能非常大甚至为负。从这个结果可以看出,TTC并不总能够正确反映危险紧急程度。本文中尝试采用THW(time headway)来表征危险紧急程度。THW定义为两车相对距离除以后车速度。从驾驶员制动反应时间与前车制动开始时的THW的关系(图9)可以看出,当THW减小时,驾驶员制动反应时间有减小的趋势,相关系数为0.158,相关性较弱。
由于驾驶员制动反应时间与THW的相关较弱,可见THW也不能很准确反映危险的紧急程度。因此尝试采用文献[15]中提出的危险感知参数RP(Risk Perception)来表征危险。危险感知参数定义为
这个参数可以同时考虑TTC和THW的影响。计算在前车开始减速时的危险感知参数,如果在前车开始减速时的TTC>15s或为负值,则设定TTC=15s。从驾驶员制动反应时间与危险感知参数的关系(图10)可以看出,当危险感知参数变大时,驾驶员制动反应时间有减小的趋势,两者相关系数为-0.247,其相关性比反应时间与THW之间的相关性更强。
因此可见,当危险紧急程度上升时,驾驶员制动反应时间有减小的趋势,这点与之前的研究结论一致。在前车减速工况中,危险感知参数比THW和TTC更适合用来表征危险紧急程度。
5 结论
首先通过行驶记录仪(VDR)对上海市嘉定区的真实交通工况进行了采集,然后对采集得到的数据进行筛选和分类,得到了6种典型的危险工况。接着对这6种危险工况下,特别是前车减速工况下的驾驶员制动反应时间做了提取和分析。结果表明,驾驶员反应时间受驾驶环境影响很大,不同类型的危险工况下驾驶员制动反应时间明显不同。在前车减速工况中,驾驶员的制动反应时间近似于对数正态分布,当车速增大、危险等级增加或危险发生在非路口时,驾驶员制动反应时间更短。
对驾驶员制动反应时间的研究成果可用于在开发先进驾驶辅助系统时调整控制参数,评价控制策略性能,也可用于设计先进驾驶辅助系统的性能测试方法。由于本文中的所有数据都来源于我国真实的交通工况,因此特别适用于开发和评价兼容我国特殊工况的先进驾驶辅助系统。
本文中用于分析驾驶员制动反应时间的样本量还相对较少,分析的范围也主要局限在出租车和警车,未来计划采集更多、覆盖范围更广的数据对驾驶员制动反应时间进行深入研究。
[1] Kiefer R J, Cassar M T, Flannagan C A, et al. Forward Collision Warning Requirements Project Final Report-Task 1, DOT HS 809 574[R]. Washington DC: National Highway Traffic Safety Administration,2003.
[2] Green M.“How Long Does It Take to Stop?”Methodological Analysis of Driver Perception-Brake Times[J]. Transportation Human Factors,2000,2(3):195-216.
[3] Lerner N D. Brake Perception-reaction Times of Older and Younger Drivers[C]. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Santa Monica: SAGE Publications,1993:206-210.
[4] Triggs T J. Driver Brake Reaction Times: Unobtrusive Measurement on Public Roads [J]. Public Health Reviews,1987,15(4):275-290.
[5] Johansson G, Rumar K. Drivers’ Brake Reaction Times[J]. Human Factors: The Journal of the Human Factors and Ergonomics Society,1971,13(1):23-27.
[6] 张展宏.基于模拟器的驾驶员应急状态下刹车反应时间的研究[J].华北科技学院学报,2009,6(10):27-30.
[7] Najm W G, Smith J D, Yanagisawa M. Pre-crash Scenario Typology for Crash Avoidance Research[R]. Washington, DC: National Highway Traffic Safety Administration,2007.
[8] Brunson S J, Kyle E M, Phamdo N C, et al. Alert Algorithm Development Program NHTSA Rear-End Collision Alert Algorithm Final Report, DOT HS 809 526[R]. Washington DC: National Highway Traffic Safety Administration,2002.
[9] 徐学珍,田宏伟.快速路驾驶员反应时间的确定[J].信息技术与信息化,2007(4):105-108.
[10] Chang M, Messer C J, Santiago A J. Timing Traffic Signal Change Intervals Based on Driver Behavior[J]. Transportation Research Record,1985,1027:20-30.
[11] Schweitzer N, Apter Y, Ben-David G, et al. A Field Study on Braking Responses During Driving. II. Minimum Driver Braking Times[J]. Ergonomics,1995,38(9):1903-1910.
[12] Muhrer E, Reinprecht K, Vollrath M. Driving with a Partially Autonomous Forward Collision Warning System: How Do Drivers React?[J]. Human Factors: The Journal of the Human Factors and Ergonomics Society,2012,54(5):698-708.
[13] Summala H. Brake Reaction Times and Driver Behavior Analysis[J]. Transportation Human Factors,2000,2(3):217-226.
[14] Jurecki R, Jaskiewicz M, Guzek M, et al. Driver’s Reaction Time Under Emergency Braking a Car-Research in a Driving Simulator[J]. Eksploatacja I Niezawodnosc-Maintenance and Reliability,2012,14(4):295-301.
[15] Kondoh T, Yamamura T, Kitazaki S, et al. Identification of Visual Cues and Quantification of Drivers’ Perception of Proximity Risk to the Lead Vehicle in Car-following Situations[J]. Journal of Mechanical Systems for Transportation and Logistics,2008,1(2):170-180.
