采用电磁直线电机的主动悬架控制系统的设计与能量分析*
2014-02-27裴金顺李以农王艳阳
裴金顺,李以农,王艳阳,孙 伟,郑 玲
(重庆大学,机械传动国家重点实验室,重庆 400030)
前言
轮边驱动电动车是采用轮毂电机直接驱动车轮的电动汽车,由于轮毂电机的引入,整车的非簧载质量明显增加,不仅影响汽车平顺性,而且降低了行驶安全性[1-2]。主动悬架可显著改善车辆总体性能,但高能耗一直是限制其在市场上推广的主要因素之一。采用电磁直线电机作为执行器的主动悬架为这个矛盾的解决提供了契机[3]。利用电磁感应原理,直线电机可将车辆振动能量转化为车辆可直接利用的电能,实现了在改善车辆性能的同时降低能耗的目的。
目前,国内外一些学者对这种自供能式电磁主动悬架做了较多的研究。文献[4]和文献[5]中采用传动机构(如滚珠丝杆螺母、齿轮齿条)配合旋转电机将旋转运动转化为直线运动,研究了自供能式主动悬架的性能与可行性,结果表明,自供能式主动悬架具有较高的功率因数和起动推力。文献[6]中阐述了一种电磁悬架的设计方案,并建立了模型和分析了节能情况,结果表明,结构阻尼、馈能元件阻尼器和充电电路性能是影响能量回收的主要因素,其平均能量回收比例为20%左右。而对采用直线电机作为执行器进行的相关研究中,文献[7]中通过仿真和试验得出,一辆典型的乘用车以96km/h行驶在B级和C级路面时,其悬架具有100~400W的能量回收潜力,并考察了轮胎刚度、路面粗糙度和汽车速度等不同参数对能量回收的影响。文献[8]~文献[10]中提出了一种利用两个直线直流电机进行主动振动控制并同时进行能量回收的悬架结构。其中一个直线电机安装于初级悬架,用做能量回收;另一个安装于次级悬架,用来进行主动振动控制,这种自供能式主动控制系统平均馈能效率可达15%。他们将这套系统成功地应用于载货汽车上[11]。文献[12]中采用skyhook控制算法,利用直线电机作动器,在降低车身垂向加速度的同时也实现了一定比例的能量回收。文献[13]中对设计的电磁阻尼器做了能量定量分析,仿真结果表明,当振动频率超过2Hz时,系统回收能量;频率小于2Hz时,系统消耗能量。
近年来,自供能式电磁悬架的研究重心集中在降低能耗,提高能量回收性能等方面[14]。在以上研究的基础上,本文中采用了一种作动器为直线电机的主动悬架,设计了LQR控制器,并针对目前自供能式电磁主动悬架能量回收性能不佳的问题,设计了一种包含能量管理单元的能量回收控制器,最终对系统的能量回收比例和能量回收有效频率范围进行了分析研究。结果表明,在改善汽车的操稳性和平顺性的前提下,所设计的能量回收控制器能够回收和利用汽车的振动能量,其能量管理单元不仅能提高系统的能量回收比例,亦能扩大能量回收的有效频率范围。
1 悬架系统模型与直线电机模型
1.1 悬架系统模型
本文中采用包含了一个电磁直线电机的2自由度的1/4车辆模型[13],如图1所示。其中直线电机既可以作为作动器,又可以作为能量回收装置。
主动悬架系统的运动方程为
(1)
(2)
式中:k1,k2分别为轮胎与悬架的刚度;Fa为主动悬架的控制力;cs为悬架减振器的阻尼;Zs、Zu分别为簧上、簧下质量的位移。
采用一个滤波白噪声作为路面输入模型:
(3)
式中:Zr为路面位移;G0为路面不平度系数;u为车辆前进速度;wt是均值为零的高斯白噪声;f0为截止频率。令
X=[x1x2x3x4]
1.2 直线电机模型
根据主动悬架作动器具有的出力大、作动速度快、作动行程长,以及直线电机各个类型的不同特点,选择了一款动圈型直线直流电机作为作动器[15-16]。动圈型直线直流电机电磁力为
Fa=BδLIa
(4)
式中:Bδ为动圈所在处的平均气隙磁密度;L为电机动圈绕组导体的总长度;Ia为线圈电流。
定义电机推力系数kf为
kf=BδL
(5)
直线直流电机的反电动势可表示为
Ea=BδLv
(6)
式中:v为电枢(动子)切割磁力线的速度,即悬架伸缩速度,定义悬架拉伸时的速度方向为正,m/s。
设电机的电枢端电压即电源输出电压为Ua,电枢回路电阻为Ra(动圈本身电阻和与它串联的驱动电路中的电阻之和)。则电压平衡方程式为
Ea=Ua-IaRa
(7)
将式(4)和式(6)代入式(7)得
(8)
由此电枢端电压和回路电流可分别表示为
Ua=(FaRa+(BδL)2v)/Ra
(9)
Ia=(Ua-(BδL)v)/Ra
(10)
因此,电源消耗功率Ec为
Ec=UaIa
(11)
2 控制器设计
2.1 LQR控制器的设计
本文中采用最优线性二次控制器LQR设计主动悬架。考虑悬架系统的评价指标,并从实现控制的角度来讲,应使控制的能量消耗较小,即控制力不能太大。取综合性能指标函数

(12)
式中:控制力U=Fa;q1、q2、q3和r为加权系数。
将性能指标函数J写成矩阵形式为

(13)
由输出Y=CX+DU,可得如下关系:
UT(R0+DTQ0D)U]dt
(14)
式中:CTQ0C=Q,CTQ0D=N,R0+DTQ0D=R;N为Q和R关联的加权矩阵,D为控制矩阵。
当车辆参数值和加权系数值确定后,根据最优控制理论可得作动器的最优控制力为
Fa=U=-KX
(15)
其中:K=R-1(NT+BTP)为最优控制反馈增益矩阵,矩阵P可以由Ricatti方程求出:
PA+ATP-PBR-1BTP+Q=0
(16)
2.2 能量回收控制器的设计
根据电磁感应原理,在对汽车进行减振的同时,直线电机可将汽车的振动能量回收转换为电能并储存起来,进而用于作动器产生主动控制力。对系统进行能量回收须设计一种能量回收控制器。根据式(9)可得出需求的理想电压,但实际电压值不一定与之相等,这由Ec的符号及其与Emin(电源向外供电的一个阈值)的大小关系来决定。求解实际电压的算法如图2所示。图2中的理想控制力由最优控制算法求出,然后根据式(9)~式(11)求出理想电压、理想电流和理想功率。实际瞬态需求功率Er的符号决定了是给系统提供能量(放电)还是从系统回收能量(充电)。
2.3 能量管理单元的设计
将振动能量转化为电能后,这些回收和储存的电能则用于向直线电机作动器提供动力。而最理想的结果是,这些回收的能量能够满足直线电机电动工作时的能量需求[17]。要达到这个目标,就须对能量进行有效的管理,所以须在图2中加入能量管理单元,实现对能量的控制。
电动车电源的储电状况可分两种情况来讨论:
(1) 当Ec>Emin时,电动车电源储存电能足够,能量管理单元不进行干预,实际供给电压Ur就等于理想需求电压Ua;
(2) 当Ec≤Emin时,电动车电源储存电能不足,能量管理单元对系统进行干预,适当减小作动器的输出力F,即F=θFa,其中比例系数θ取值范围为0<θ<1,然后由式(9)得出实际供给电压Ur。
由以上分析计算可以得到电机的实际供给电压值,然后实际电流值、实际功率消耗值以及实际系统消耗和回收的能量都可以相继求出。
系统消耗和回收的能量是由实际瞬态功率Er对时间t积分而得:
当Er>0时,系统消耗能量,实际消耗能量为

(17)
当Er<0时,系统回收能量,实际回收能量为
(18)
3 仿真计算与结果分析
表1为某电动轿车的模型参数,表2为电机模型参数。在不同行驶工况下进行了车辆行驶性能仿真并考察了能耗情况。本文中以表3所列的仿真工况和表4所选择的控制器性能指标加权系数为例进行了仿真计算。通过对被动系统和加入能量管理单元前后的主动悬架系统的对比分析,验证了控制器的控制效果。

表1 车辆模型参数
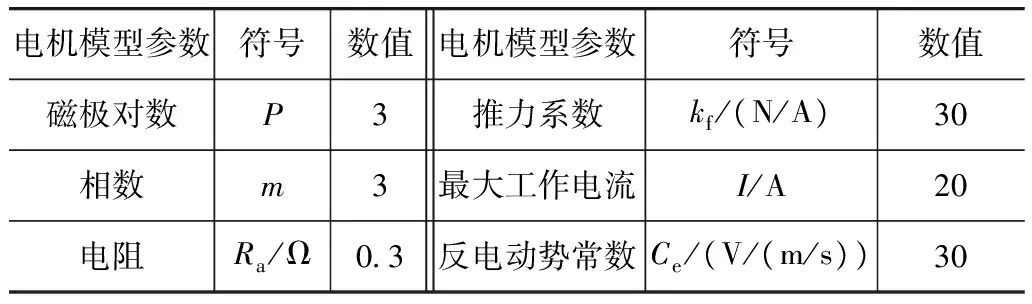
表2 电机模型参数
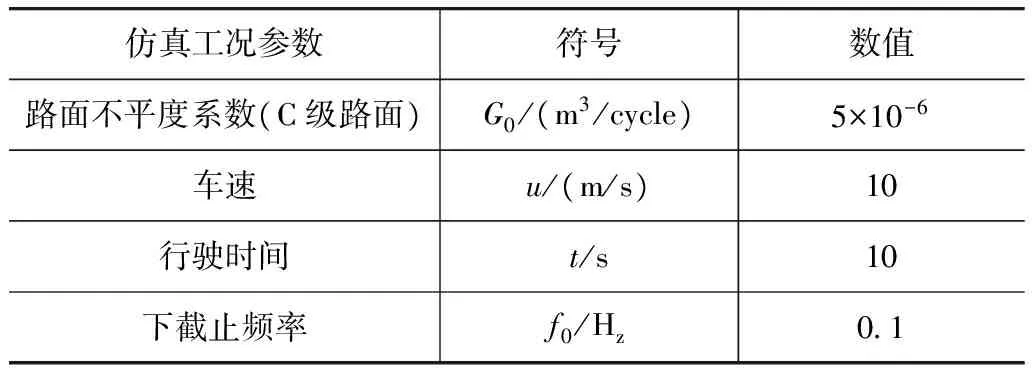
表3 仿真工况参数
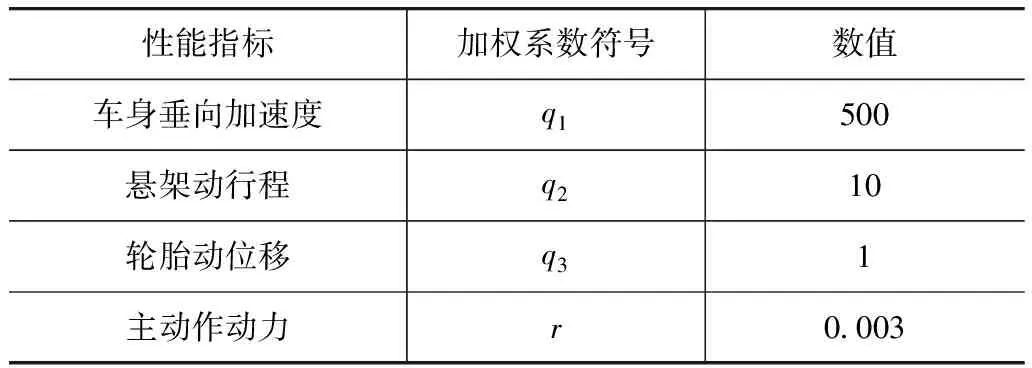
表4 性能指标加权系数
图3和图4分别为车身垂向加速度、轮胎动载荷的时域波形图。可以看出,加入能量管理单元的主动控制效果要比未加入能量管理单元的主动控制效果稍差,但两者较被动悬架都有明显改善。从时域响应得出的加与未加能量管理的主动悬架性能指标的均方根值相对被动悬架的降幅见表5。可以看出,加入能量管理单元前后的主动悬架车身垂向加速度均方根值比被动悬架分别降低了60.4%和52.1%;加入能量管理单元前后的主动悬架轮胎动载荷均方根值比被动悬架分别降低了36.2%和32.2%。

表5 时域均方根值
从上述分析可以得出结论:相对于被动悬架,基于本文设计的LQR控制器的直线电机式主动悬架能够明显降低车身垂向加速度和轮胎动载荷的幅值,在保证汽车操纵稳定性的前提下,提高了汽车行驶的平顺性。同时看出,能量管理单元对改善汽车性能有一定影响。产生这种现象的原因是,在一定情况下能量管理单元限制了主动悬架的主动控制力,所以控制效果有所降低。
下面对直线电机式主动悬架的能量回收性能进行仿真分析。路面输入仍然为C级路面,并将仿真时间延长至30s。
定义系统能量净消耗为系统消耗能量与系统回收能量的差值。图5为加入能量管理单元前后系统能量净消耗的对比图,可以看出在30s仿真时间内,加入能量管理单元后,能量净消耗减少了60%。
定义系统能量回收比例为系统回收能量与系统消耗能量的比值。图6为加入能量管理单元前后系统能量回收比例的对比图。由图可见,在整个仿真时间内,加入能量管理单元后,系统能量回收比例明显提高,但其随时间的变化趋势基本不变。在前5s的仿真时间内,加入能量管理单元前后的系统能量回收比例都有一定波动。这是由于在仿真初期,实际消耗瞬态功率Er比较小,导致其积分值即消耗能量值也比较小,并且在计算能量回收比例时,能量消耗值是作为分母,所以在进行除法运算时,结果会产生较大的波动。随着仿真时间的增加,消耗能量越来越大,得到的仿真结果也趋于稳定。5s后能量回收比例先有一定提升然后再慢慢地下降,但均在一个很小的比例范围内,而在15s以后,系统的能量回收比例相对达到了一定的稳定值,分别为28%和40%。
从上述分析可以得出结论,能量管理单元对系统节能有积极作用,它可以大幅提高能量回收比例。虽然在前段仿真时间内,系统能量回收比例有一定的波动,但很快都达到了一个稳定的波动范围并最终达到了一个相对稳定的值。
表6为汽车在C级路面下,以不同车速行驶时的稳态能量回收比例仿真结果。
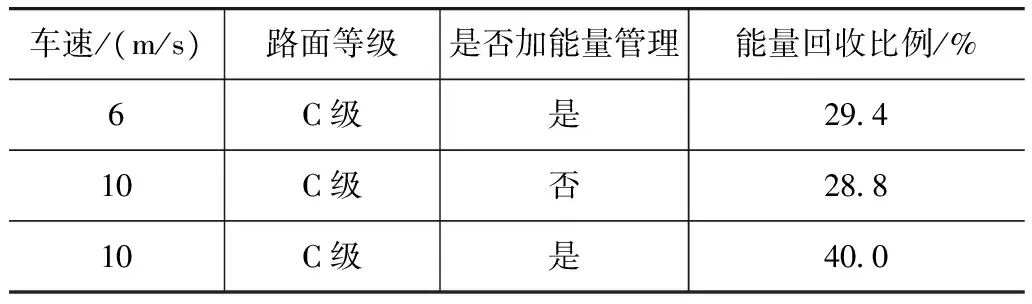
表6 不同车速车辆仿真结果
当系统能量回收比例同时达到30%左右时,未加入能量管理单元的汽车需要10m/s的速度,而加入能量管理单元的系统只需要6m/s的速度,可见能量管理单元扩大了系统能量回收的有效车速范围,即以较低车速行驶时,能量回收比例也较高。
当汽车以一定车速u(m/s)驶过空间频率n(m-1)的路面不平度时输入的时间频率f(s-1)是n与u的乘积[18],即
f=un
(19)
由式(19)可以看出,当路面输入空间频率n一定时,路面输入时间频率f与车速u成正比。所以从另一个角度也可以说,能量管理单元可以扩大系统能量回收的有效频率范围。
图7为在有无能量管理时能量消耗和回收的对比,从图中可以看出,整个仿真时间内,加入能量管理单元后,能量消耗减少了一半,进一步说明了能量管理单元对系统节能有很重要的作用。而加入能量管理单元前后系统回收的能量变化不大,在一定程度上提高了系统的能量回收比例。
为进一步说明能量管理单元对系统能量回收有效频率范围的影响,采用幅值为0.1m、频率范围为0.1~10Hz的正弦波为路面输入,继续对系统进行仿真,结果见表7。
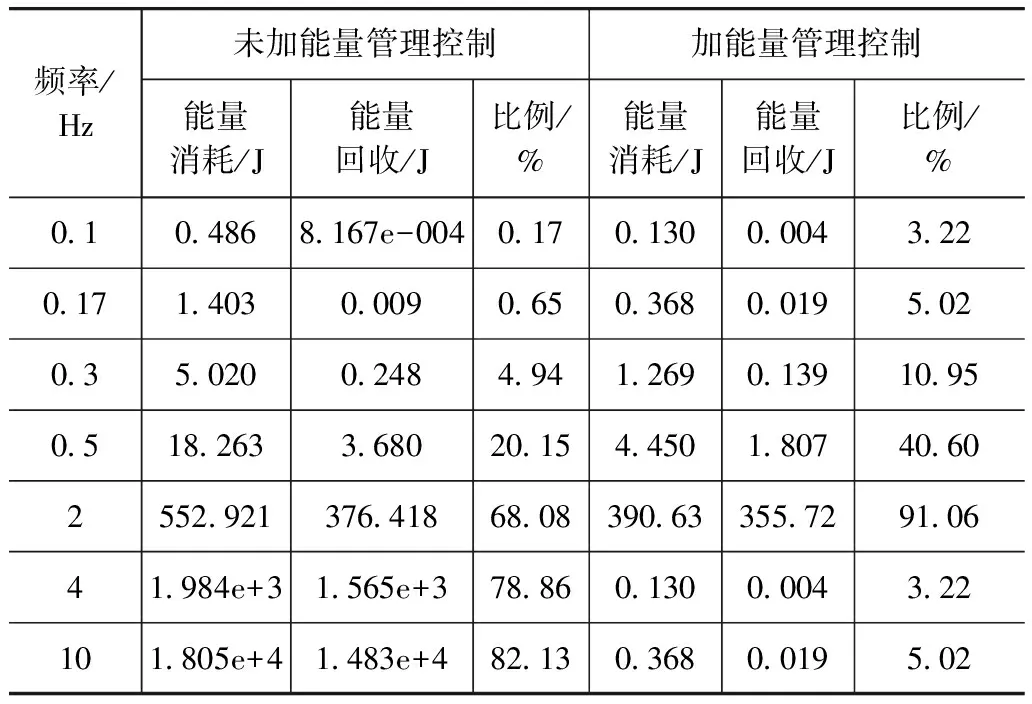
表7 各频率正弦输入下电机的能量消耗和回收
由表7可知,当系统输入为各个频率的正弦路面时,随着输入频率的升高,系统消耗和回收的能量都在增加,但加入能量管理单元的能量回收比例一直高于未加能量管理单元的能量回收比例;加入能量管理单元的系统,当正弦输入频率增加到2Hz时,能量回收比例达到90%以上,当频率继续增加时,能量回收比例值一直维持在92%左右;当系统能量回收比例同时达到5%左右时,未加入能量管理单元的系统需要0.3Hz以上的正弦激励,而加入能量管理单元的系统只需要0.168Hz的正弦激励,显然能量管理单元扩大了能量回收的有效频率范围。以上对随机路面和正弦激励路面的仿真结果,充分证明了能量管理单元不仅可以提高系统能量回收的比例,还可以扩大系统能量回收的有效频率范围。
从图2能量回收控制原理图可以看出,能量管理单元加在电源放电支路上,当电源储存的能量不足时,系统就会限制电机的实际输出力,从而导致系统能量消耗减少,而能量管理单元对电源充电支路影响较小,并且在加入能量管理单元前后的车身振动情况变化相对较小,则系统回收的能量幅值变化较小,尤其在低频正弦输入时,系统可以回收的能量较少,在加入能量管理单元前后的系统回收能量幅值变化更小。所以在系统能量消耗大大降低的前提下,系统回收能量幅值变化甚微,从而系统的能量回收比例得到了大幅提高。
4 结论
(1) 直线电机式主动悬架可以很好地改善轮边驱动电动汽车的行驶平顺性和操纵稳定性,汽车整体性能都能得到提高。
(2) 所设计的能量管理单元不仅可以提高直线电机式主动悬架系统的能量回收比例,还可以扩大系统能量回收的有效频率范围,系统能量回收性能得到提高。在加入能量管理单元的系统中,当输入频率低于0.168Hz时,系统能量回收比例较低,系统可以通过加入高通滤波器只对0.168Hz以上的有效频率进行能量回收,提高能量回收性能。
(3) 直线电机式主动悬架可以进行能量回收,实现汽车减少能耗和提高能量利用率的目的,同时降低成本,拥有广泛的应用前景。
[1] 宁国宝,万钢.轮边驱动系统对车辆垂向性能影响的研究现状[J].汽车技术,2007(3):21-25.
[2] 存良,宁国宝.轮边驱动电动车大质量电动轮垂向振动负效应主动控制[J].中国机械工程学报,2006,4(1):31-34.
[3] Wang Jiabin, Wang Weiya, Atallah Kais. A Linear Permanent-magnet Motor for Active Vehicle Suspension[J]. IEEE Ttansactions on Vehicular Technolog,2011,60(1):55-63.
[4] 喻凡,曹民,郑雪春.能量回馈式车辆主动悬架的可行性研究[J].振动与冲,2005,24(4):27-30.
[5] 欧阳冬,张克跃,张继业,等.车辆能量回馈式主动悬架系统研究[J].振动与冲击,2008,27(8):88-92.
[6] 于长淼,王伟华,王庆年.电磁馈能式悬架方案设计与节能分析[J].汽车技术,2010(2):21-25.
[7] Zuo L, Zhang P S. Energy Harvesting, Ride Comfort and Road Handling of Regenerative Vehicle Suspensions[C]. ASME 2011 Dynamic Systems and Control Conference,2011.
[8] Nakano K, Suda Y, Nakadai S. Self-powered Active Vibration Control Using Regenerated Vibration Energy[J]. Journal of Robotics and Mechatronics,1999(11):310-314.
[9] Suda Y, Nakadai S, Nakano K. Study on the Self-powered Active Vibration Control[C]. Proceedings of the 4th International Conference on Motion and Vibration Control(MOVIC), Zurich, Switzerland:1998:91-96.
[10] Suda Y, Nakadai S, Nakano K. Hybrid Suspension System with Skyhook Control and Energy Regeneration(Development of Self-powered Active Suspension)[J]. Vehicle System Dynamics,1998,29(1):619-634.
[11] Nakano K, Suda Y, Nakadai S, et al. Self-powered Active Control Applied to a Truck Cab Suspension[J]. JSAE,1999,20:511-516.
[12] Nakano K, Suda Y, Nakadai S. Self-powered Active Vibration Control Using a Single Electric Actuator[J]. Sound Vibrat,2003,60(2):213-235.
[13] Kawamoto Y, Suda Y, Inoue H, et al. Modeling of Electromagnetic Damper for Automobile Suspension[J]. Journal of System Design and Dynamics,2007(1):524-535.
[14] 喻凡,张勇超.馈能型车辆主动悬架技术[J].农业机械学报,2010,41(1):1-6.
[15] 叶岳云.直线电机原理与应用[M].北京:机械工业出版社,2002.
[16] 郭庆鼎.直线交流伺服系统的精密控制技术[M].北京:机械工业出版社,2000.
[17] Singal K. Rajamani R. Simulation Study of a Novel Self-Powered Active Suspension System for Automobiles[C]. American Control Conference, June 29 -July 01,2011.
[18] 余志生.汽车理论[M].北京:机械工业出版社,2006.
