基于危险理论云决策的发动机状态检测技术研究*
2014-02-27孟庆华黄琴宝陈慧勤
孟庆华,黄琴宝,陈慧勤
(杭州电子科技大学机械工程学院,杭州 310018)
前言
发动机是车辆、船舶和其他动力机械的核心部件,当状态出现异常时若没有及时发现而进行检修,轻则造成发动机本身零部件的破坏,重则造成重大的交通事故和人员伤亡事故,有时还会对环境产生不利影响。因此,开展发动机状态检测技术研究具有重要的现实意义。
目前发动机故障诊断主要采用以下3种方法:(1)基于物理模型的方法[1],如卡尔曼滤波算法;(2)基于数据的方法[2-3],如人工神经网络、模糊逻辑、粗糙集和决策树等;(3)基于知识的方法。基于模型的方法需要有具体发动机型号的准确部件特性,物理模型的精度决定了诊断的准确度,然而由于发动机安装制造公差和建模误差使基于模型的故障诊断产生的误诊和漏诊比较多。基于数据的方法以发动机测量数据作为部件故障诊断的依据,但测量精度和各种算法的缺陷都会对诊断精度影响很大。基于知识的方法则过于依赖以往的专家经验和各种先验知识,对各种具体的工作状况和新类型的故障不能作出准确诊断。
目前,出现了以各种智能算法为基础的信息融合[4],这些智能融合算法主要集中在以基于数据的方法进行诊断的基础上提出的,如各种不同类型的神经网络之间的融合,神经网络与模糊算法的融合,以及粗糙集与神经网络融合等。这类融合能在一定程度上解决单一智能算法存在的缺陷,但没有考虑到不同发动机的物理特性,片面地从数据出发,当发动机的部件特性发生轻微变化或出现新的故障类型时,就会严重影响部件故障诊断的精度[5]。
文献[6]和文献[7]中将危险理论应用于计算机受侵检测。文献[8]中提出了将危险理论用于web挖掘的模型。文献[9]中将危险理论用于MANETs中,提高了分类识别率和响应速度。根据现有检索到的国外文献资料来看,国外学者的研究方向主要是研究危险理论在预防计算机网络受侵方面的应用。目前国内也有少量学者从事危险理论方面的研究,研究方向和国外学者研究的方向基本一致,大部分集中在计算机受侵检测方面[10]。
本文中根据免疫危险理论,并结合云模型[11-12],给出了一种基于危险理论-云决策的状态检测算法,将其应用到汽车发动机状态检测诊断中。使用发动机故障模拟试验台,模拟出发动机在运行时常见的几种不同故障,并借助各种传感器收集相应工况下的故障信号和正常信号。对采集到的振动信号进行消噪和特征提取后,建立发动机正常信号数据库、记忆危险信号数据库和成熟危险信号数据库。通过实际检测发动机状态验证了该诊断技术的有效性。
1 汽车发动机状态检测试验台系统构建
采用自行设计的发动机故障模拟试验台用于模拟不同发动机的工作状况和故障类型。硬件系统通过四合一信号调理器采集发动机振动和噪声信号,将采集到的信号输入到高精度数据采集仪,通过配套的数据采集软件将采集的信号实时显示并储存在计算机中,供诊断算法使用。发动机状态诊断系统的硬件系统如图1所示。
2 危险理论识别模型构建
危险理论识别模型源于危险理论中提出的人体免疫反应不是针对外部物质,而是对危险信号做出反应。将危险理论引入到状态检测中后,故障被视为危险的状态行为。在危险理论识别模型中,首先要解决的问题是危险信号的定义,从而能够对动态系统的行为发出警报。
2.1 危险信号的定义
为了实现故障的检测,首先要选择能够被检测的动态系统的输入数据。根据危险模型,在故障诊断中,将危险理论引入后,对于危险信号和安全信号做出如下定义。
(1) 定义偏差信号为安全信号 偏差是指模型的期望输出数据和系统实际输出数据之间的差别。该偏差信号作为安全信号使用,可以指示出系统的实际运行状态与某种安全状态的差距。在这种情况下,该方法必须要有正常数据以便采用传统建模技术建立一个动态模型。模仿原来的动态系统建立的模型产生的信号可以认为是系统产生的信号。偏差信号的定义见图2。
(2) 使用已知的故障状态作为危险信号 通过试验的方法能够获取系统运行中出现的一些故障状态,可以将这些获取的故障状态进行处理后作为危险信号使用。
图3为引入危险模型后安全信号和危险信号的定义。
2.2 初级检测模块
采用小波包技术提取数据的特征。利用小波包算法计算信号s(n)在各层上的系数,具体选择最优小波包基的算法实现步骤如下[7]。
(1) 对信号按选定的母小波和级数进行小波包分解。
(2) 从最下层开始,把每个节点都做上标志,而对其他各层节点不做标记。
(3) 每一层共有2j个节点,从左至右每两个节点构成一组,由下往上进行相邻两层的下一层每组的两个节点之和与上一层对应节点的阈值比较。
(4) 若下一层的两个节点的评价函数值之和大于等于上一层对应节点的评价函数值,则对上一层的该节点做标记,而去掉下一层的该两个节点(当“下一层”处于中间某层时,还要去掉由该两个节点分解所得到的所有的子节点)的标记,否则以下一层该两个节点的评价函数值之和取代上一层的该节点的评价函数值,但对标记不做处理。
自下而上对相邻两层按上述过程逐层进行比较,直至对所有层均处理完毕。被做上标记的所有的节点对应的小波包函数即是搜索到的最优小波包基。
(5) 求各频段的小波包分解系数序列的能量。第dN,j个频段的能量Ej为
(1)
式中q为序列dN,j,k中分量的个数。
(6) 向量的构成。按尺度顺序,以分解后各层高频小波分解系数序列的能量为元素组成特征向量,即E=[E1,E2,…,El]。对此能量序列做归一化处理,使序列的和为1,处理后的序列记为Pj,则
(2)
式中l为小波包分解后的层数。
利用得到的特征向量与初级检测模块中的各检测器进行匹配,发生匹配的检测器将检测数据特征传递给APC决策模块并发出初级检测信号。匹配程度值μ为
(3)
式中:P为检测数据特征向量;D为检测器集中的检测器;r为检测器覆盖区域的半径;‖‖表示欧式距离。
当μ达到阈值时即可认为发生匹配,从而刺激系统发出初级检测信号。
2.3 APC检测模块
APC决策模块将初级检测结果进行数据融合,得到能够充分表达检测数据完整特征的特征向量。APC决策模块调用模块中带有的记忆危险信号数据库和检测数据的特征向量进行亲和度计算,若得到的亲和度小于等于设定的亲和度则发生匹配,APC模块发出最终检测信号,刺激自适应响应模块发出报警响应。
亲和力的计算公式如下:
Ai=1/(1+ti)
(4)
(5)
式中:Ai为抗原和抗体之间的亲和力,其值在0和1之间,Ai=1时表示抗体与抗原理想结合,得到最优解;ti为抗原和抗体i的结合强度;Yij为自体集合S中的第i个自体上的第j个DNA分子;Xj为新采集到的自体上的第j个DNA分子;m为组成每个自体的DNA分子数。
2.4 自适应响应模块
自适应响应模块接收APC模块发出的最终检测信号后发出危险信号,确认危险状态的存在,同时对发生匹配的特征向量进行克隆变异。克隆变异遵循进化论中优胜劣汰的原则,只有匹配程度高的特征向量才进行克隆变异。将抗原与抗体间的欧式距离作为衡量两者之间匹配程度的一个指标。将抗原中的每个DNA分子分别与抗体中的每个DNA分子相匹配,对任意抗原Xi和任意抗体Yj,两者之间的欧式距离为
(6)
式中:t为一个抗原或抗体中包含的DNA分子数量;Xit为Xi抗原中的第t个DNA分子;Yjt为Yj抗体中的第t个DNA分子。
定义α=1-d(i,j)为抗体Yj受到来自抗原Xi的激励。抗体受抗原激励的阈值为
(7)
式中:n为抗原总数;k为抗体总数。即当抗体Yj所受到的来自抗原的刺激满足α>p时,免疫系统被激活,抗体开始克隆变异。
每个抗体对应的克隆数量为
(8)
(9)
式中:ps为抗体总数;b为使用最佳抗体进行克隆产生的抗体最大值;r为被选中进行克隆的抗体级别。
则由于抗原Xi的入侵引起的Yj的克隆所生成的抗体为
(10)
3 云决策模型构建
云的数字特征用期望值Ex、熵En和超熵He3个数值来表示,它把模糊性和随机性完全集成到一起,构成定性和定量相互间的映射。
(1) 期望值Ex是概念在论域中的中心值,是最能代表这个定性概念的值,通常是云质心对应的x值。
(2) 熵En是定性概念模糊度的度量,反映了在论域中可被这个概念所接受的数值范围,体现了定性概念亦此亦彼性的裕度。熵越大,概念所接受的数值范围也越大,概念越模糊。
(3) 超熵He是熵的熵,反映了云滴的离散程度。超熵越大,云滴离散度越大,隶属度的随机性越大,云“厚度”也越大。
本文中提出的算法采用逆向云发生器从真实训练数据中由危险模型生成的特征向量得到云的数字特征,形成实际判断规则,实现建模。数据建模首先根据故障种类从训练数据中提取反映故障类型的特征向量,利用逆向云发生器计算提取属性的数字特征,从而完成建模过程,具体算法步骤如下。
输入:N个云滴的定量值及每个云滴代表概念的确定度(x,y)。

算法:
结合前面给出的危险理论识别模型,以抗原X和检测器集合以及设置的Ex、En和He值作为输入,以X是自体还是非自体作为输出,编写的云决策算法如下。
(1) 获取待识别的抗原。
(2) 对于检测器集合中的每个检测器,进行如下步骤的循环:
(a) 采用R-邻域位匹配算法计算出检测器和待识别抗原的R-邻域位匹配数,同时根据匹配数的大小将检测器从大到小排序;
(b) 计算出检测器和待检测抗原的亲和度;
(c) 取前n个检测器并形成n个云滴;
(d) 根据这n个云滴得到待检测抗原对检测器集合的期望值Ex、熵En和超熵He;
整个状态检测算法流程图如图4所示。
4 试验验证
在丰田LS400轿车的IUZ-FE发动机故障模拟实验台上模拟了如下发动机故障:
(1) 设置空气流量计传感器故障,使发动机怠速不稳,排气管冒黑烟,加速不良;
(2) 设置水温传感器故障,使发动机在怠速时怠速不稳;
(3) 设置2、8缸喷嘴不工作,发生缺缸现象;
(4) 电控单元ECU控制喷油器电磁阀打开时间的电脉冲异常,导致喷入到气缸中的燃油雾化不良。
使用智能信号采集仪和信号处理软件分别对4种故障对应的振动信号进行采集,将信号输入到本文中所建立的状态检测算法中。分别采集70组数据,前30组作为训练样本,后40组数据作为待检测样本。通过算法的分析得到的4种不同状态下的特征参数,如表1所示。检测结果如表2所示。
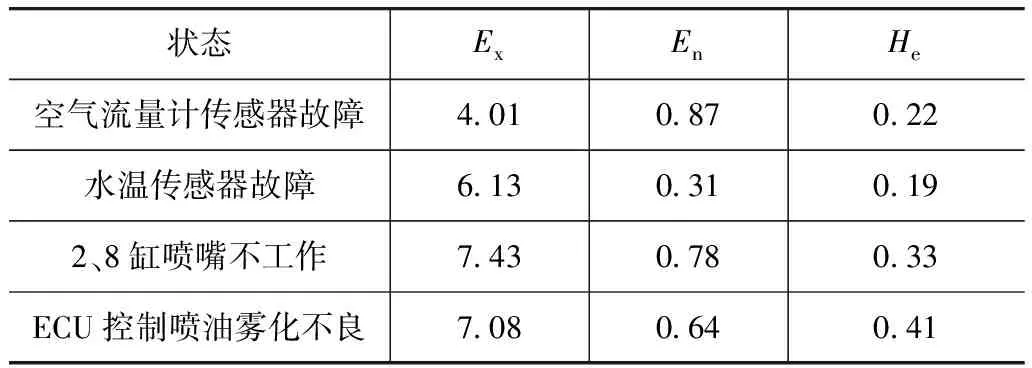
表1 算法中获取的4种故障状态下的特征参数
为了对比本文中所提出的方法的优势,采用当前比较流行的神经网络检测方法与之进行对比。由于径向基函数网络(RBF)无论在逼进能力、分类能力和学习速度等方面均优于BP网络,故在此使用RBF网络[13]。设计一个具有8个输入节点、1个含有401个神经元的隐含层、1个线性输出层的RBF网络,其结构如图5所示。
采用与本文中算法使用完全相同的训练样本和待检测样本,RBF网络检测结果如表3所示。

表2 基于危险理论云决策的检测结果
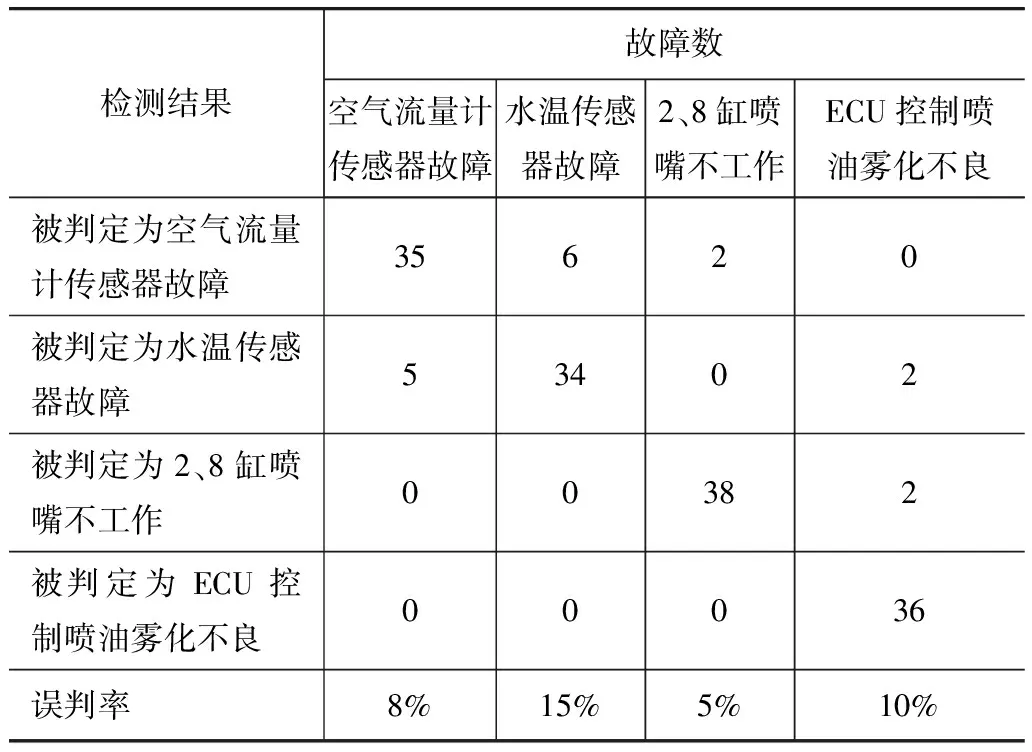
表3 RBF网络检测方法检测结果数据
从表2与表3的对比可以看出,本文中所提的方法在检测准确度上优于RBF算法,特别是在水温传感器故障检测方面有明显的优势。
5 结论
(1) 根据危险理论构建了危险信号识别模型,并给出了危险信号和安全信号的定义。
(2) 根据云模型构建了云决策模型,用于进一步识别危险理论识别模型中的不确定性信号。
(3) 利用丰田LS400轿车的IUZ-FE发动机故障模拟实验台模拟了4种发动机故障,采用本文中给出的算法进行了检测,误判率不大于2.5%,验证了本算法的有效性。
[1] Lu Feng, Huang Jinquan. Application of Intelligent Compensation to Engine Health Management System[C]. Proceedings of Computing, Communication, Control and Management. Florida, USA:IEEE Computer Society,2008.
[2] 黄向华,丁毅.基于几何模式识别的发动机传感器故障诊断[J].航空学报,2006,27(6):10182-10221.
[3] 陈恬,孙健国.粗糙集与神经网络在航空发动机气路故障诊断中的应用[J].航空动力学报,2006,21(1):2072-2121.
[4] Feng Z G, Shida K, Wang Q. Sensor Fault Detection and Data Recovery Based on LS2SVM Predictor[J]. Chinese Journal of Scientific Instrument,2007,28(2).
[5] Brot herton T, Grabill P, Wroblewski D, et al. A Test Bed for Data Fusion for Diagnostics and Prognostics[C]. Proceedings of the 2002 IEEE Aerospace Conference. Big Sky MT:IEEE,2002.
[6] Aickelin Uwe, Greensmith Julie. Sensing Danger:Innate Immunology for Intrusion Detection[J]. Information Security Technical Report,2007,12(4):218-227.
[7] Greensmith Julie, Feyereisl Jan, Aickelin Uwe. The DCA:Some Comparison a Comparative Study Between Two Biologically Inspired Algorithms[J]. Evolutionary Intelligence,2008,1(2):85-112.
[8] Secker A, Freitas A, Timmis J. A Danger Theory Inspired Approach to Web Mining[C]. Proc. of International Conference on Artificial Immune Systems. Springer,2003:156-167.
[9] Hoffman Katherine, Ondi Attila, Ford Richard. Danger Theory and Collaborative Filtering in MANETs[J]. Journal in Computer Virology,2009,5(4):345-355.
[10] Zhang Junmin, Liang Yiwen. A Double Layers Detection for DoS Based on the Danger Theory[C]. International Conference on Computer Modeling and Simulation,2009:147-151.
[11] 李德毅,刘常昱.论正态云模型的普适性[J].中国工程科学,2004,6(8):28-34.
[12] 刘禹,李德毅,张光卫,等.云模型雾化特性及在进化算法中的应用[J].电子学报,2009,37(8):1651-1658.
[13] 孟庆华,赵文礼,樊志华,等.基于改进型阴性选择算法的车辆故障检测方法研究[J].兵工学报,2009,30(12):1722-1727.
