混合动力汽车发动机转矩突变过程动态协调控制*
2014-02-27罗禹贡李克强
赵 峰,罗禹贡,张 娜,李克强
(清华大学,汽车安全与节能国家重点实验室,北京 100084)
前言
汽车急加速时,加速踏板行程大幅度变化,为了满足动力性需求,混合气瞬间加浓,输出转速和转矩急剧变化,导致整车动态油耗的增加和排放的恶化[1]。对于多动力源的混合动力汽车,可利用电机动态响应速度快、转矩控制精确等优点对总需求转矩进行动态补偿,调节发动机转速和转矩的变化速率,使发动机转速和输出转矩尽可能平稳变化,降低急加速过程的动态油耗。
丰田PRIUS[2-3]通过特有的行星齿轮结构,利用发电机的调速作用和电动机的转矩补偿作用,成功地降低了加速过程中的动态油耗。文献[4]和文献[5]中分别开展了柴油机混合动力汽车加速工况优化控制研究,通过限制柴油机的转矩和转速,降低了柴油机加速过程中的动态油耗和排放,同时利用电机转矩补偿策略,保证了加速过程的动力性,但是两者的研究均停留在仿真阶段,缺乏进一步的实车道路验证。文献[6]在此基础上考虑了发动机转动惯量对动态油耗的影响,但同样没有进行实车道路验证。
本文中针对混合动力汽车急加速工况的发动机转矩突变过程,提出了一种基于转矩动态补偿的混合动力汽车发动机转矩突变过程动态协调控制方法。首先通过对发动机转矩变化速率的限制,避免了发动机转矩突变过程中动态油耗的增加。然后利用电机转矩动态响应速度快、控制精确等优点,进行转矩补偿,避免了整车动力性的下降。最后进行了实车试验,试验结果表明,该动态协调控制方法能够在保证整车动力性的前提下,改善混合动力汽车发动机转矩突变过程的燃油经济性。
1 研究对象
本文中的研究对象如图1所示。该混合动力汽车的驱动系统由发动机、主电机PM、副电机BSG、机械式自动变速器AMT和动力电池等主要部件组成。其中主电机PM被布置在AMT后端,用于驱动或者进行制动能量回收,副电机BSG被连接于发动机前端,用于给电池充电或者快速起动发动机。
2 发动机转矩突变过程动态协调控制
针对急加速等工况下发动机转矩突变时发动机动态油耗增加和排放恶化等问题,设计了如图2所示的混合动力汽车发动机转矩突变过程动态协调控制系统,包括驾驶员操作、能量管理策略、动态协调控制策略、部件执行系统和车辆系统。

其中,发动机转矩突变过程动协调控制策略包括进入退出控制算法、基于斜率限制的发动机转矩控制策略和基于动态补偿的电机转矩控制策略。进入退出控制算法用于判断是否进行动态协调。基于斜率限制的发动机转矩控制策略和基于动态补偿的电机转矩控制策略,通过协调控制发动机转矩和电机转矩,在保证整车动力性的前提下,有效减小发动机转矩突变过程的动态油耗。
2.1 进入退出控制算法
设计的进入退出控制算法如图3所示。
图中:Brks为制动信号;ShifC为换挡命令;α为加速踏板行程;c0为加速踏板行程变化率门限值;Ictl为协调控制命令;Ictl_last为上一时刻的协调控制命令;Telim为斜率限制后的发动机转矩;δ为转矩差门限值。
首先,对制动信号Brks、换挡命令ShifC和混合动力工作模式M进行判断。当制动信号Brks不为0、换挡命令ShifC不为0或者工作模式M不为1、2或7时,即驾驶员踩下制动踏板、自动变速器发生换挡或者混合动力系统不工作在发动机单独驱动、电动助力或传统车模式时,不进行动态协调控制;当同时满足驾驶员没有进行制动,自动变速器没有发生换挡,混合动力系统工作在发动机单独驱动、电动助力或传统车模式,且加速踏板行程变化率大于c0时,进入发动机转矩突变过程动态协调控制;进入动态协调控制后,直至加速踏板行程变化率小于等于c0,且经斜率限制的发动机转矩Telim与能量管理策略制定的发动机转矩Ter之差小于等于δ时,退出动态协调控制。
2.2 基于斜率限制的发动机转矩控制策略
混合动力汽车急加速时,可以充分利用混合动力系统的结构特点,控制发动机转速和输出转矩平稳变化,以达到降低加速过程动态油耗的目的。
本文中研究的混合动力汽车,在发动机参与工作的各种工作模式下,发动机转速和车速成固定比例关系,因此难以通过控制发动机转速来降低加速过程中的动态油耗。但是,可以充分利用位于AMT后端的主电机的动态响应特性,控制发动机输出转矩的变化速率,以达到降低加速过程中动态油耗的目的。
为了验证上述思想,在相同车辆状态、相同驾驶员输入的前提下,针对不同发动机转矩变化速率进行了实车试验,结果如图4所示。
由图可见,通过改变发动机输出转矩的变化速率,能够降低其动态油耗。
根据以上分析,设计了基于斜率限制的发动机转矩控制策略,其计算公式为
(1)
动态协调过程中,发动机转矩的变化速率控制在K以内,直至退出动态协调控制。未进入动态协调控制时,发动机仍然执行能量管理策略制定的发动机期望转矩,即
(2)
2.3 基于动态补偿的电机转矩控制策略
动态协调过程中,设计的发动机转矩控制策略对发动机转矩的变化率进行了限制,此时发动机实际输出转矩无法满足驾驶员需求。因此,须利用动态响应速度快、转矩控制精确的主电机,对发动机转矩受限部分进行动态补偿,保证动态协调过程中发动机输出转矩和电机输出转矩之和仍能满足驾驶员驱动总需求。
针对以上问题,设计了基于动态补偿的电机转矩控制策略,其计算公式为
(3)
动态协调过程中,主电机对驾驶员需求驱动总力矩Treq(k)和实际发动机转矩Teact(k)的差值进行动态补偿;未进入动态协调控制时,主电机仍然执行能量管理策略制定的期望电机转矩,即
(4)
3 实车验证
为了验证所提出的混合动力汽车发动机转矩突变过程动态协调控制方法的有效性,基于dSPACE开发了如图5所示的试验系统,对某款重度混合动力汽车进行试验。
基于上述测试系统,设计了如表1所示的试验工况。全部试验均在长春农安试车场完成。
为了便于对比有无动态协调控制的控制效果,要求测试工况具有重复性,因此试验过程中的加速踏板行程由试验人员通过dSPACE手动输入,输入的加速踏板行程如图6所示。无动态协调控制时的试验结果如图7所示。
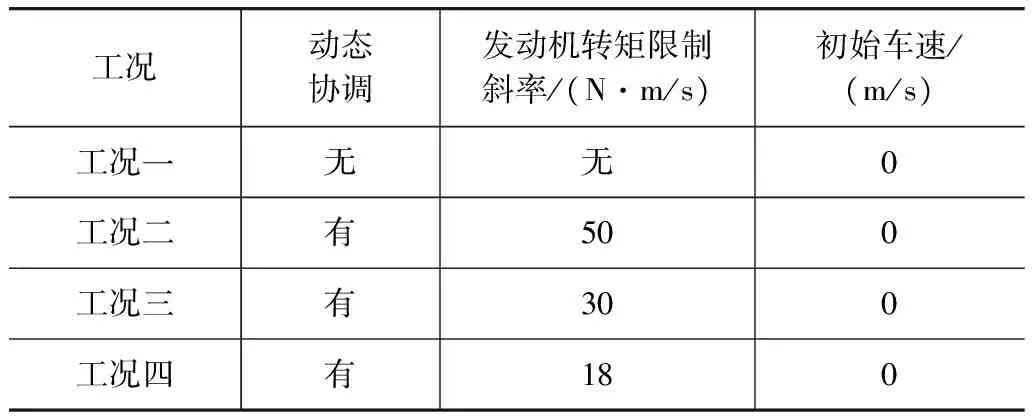
表1 试验工况
由图可见:23.4s时加速踏板行程开始迅速增大,发动机需求转矩从60瞬间增大至100N·m以上,由于该发动机的动态响应速度较慢,0.4s后发动机实际转矩达到目标值,此时车辆处于发动机单独驱动模式,主电机不参与工作;直至24.9s,换挡命令变为1,开始换挡,能量管理策略制定的需求发动机转矩减小、需求电机转矩增加;从23.4到24.9s为典型的急加速过程,统计该过程的平均加速度和平均瞬时油耗分别为0.6m/s2和4.13mL/s。
发动机转矩斜率限制为18N·m/s时的试验结果如图8所示。
由图可见:24.81s时加速踏板行程迅速增大,进入动态协调控制,发动机实际转矩跟随动态协调控制策略制定的发动机转矩命令以低于18N·m/s的速率缓慢上升,电机动态补偿发动机实际转矩与能量管理策略制定的发动机期望转矩之间的差值;29.59s时换挡命令从0变为1,开始换挡,为了避免与换挡过程动态协调控制策略发生冲突,退出本文中设计的发动机转矩突变过程动态协调控制;24.81到29.59s的平均加速度增大为0.7m/s2,平均油耗减小为2.43mL/s;相比于没有动态协调控制时,动态油耗减小41%,加速性能提高17%。
加速性能的提高是因为试验车辆所配发动机的动态响应特性较差,无动态协调控制时,急加速初期发动机无法快速响应发动机期望转矩的突然变化,0.4s后才达到目标值,如图7(c)所示;有动态协调控制后,发动机转矩命令平稳变化,发动机实际转矩能够很好地跟随命令值,如图8(c)所示,同时还利用电机对发动机实际转矩和期望转矩的差值进行了动态补偿。因此,进行动态协调控制后,不仅能够降低加速过程中的动态油耗,也能够改善整车的动力性。
为了进一步说明本文中提出的动态协调控制方法的控制效果,对表1中所设计的各种工况的试验结果进行了统计分析,具体如表2所示。
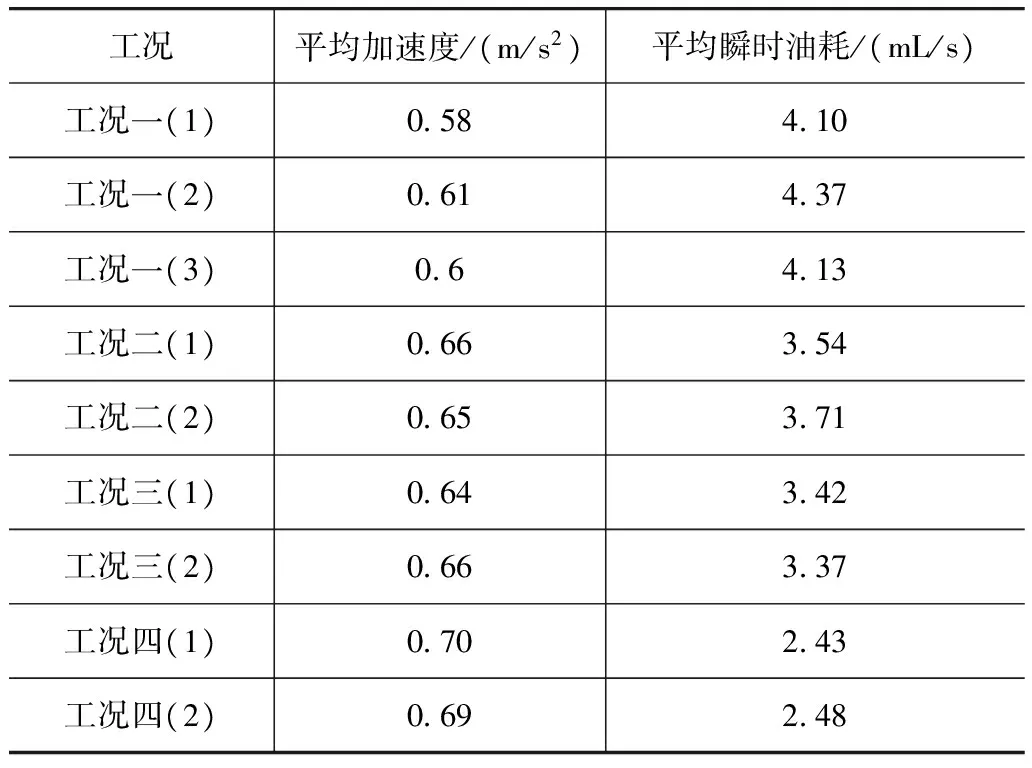
表2 试验结果统计
由表可见:无动态协调控制时平均加速度为0.597m/s2,平均瞬时油耗为4.2mL/s;发动机转矩限制斜率为50N·m/s时平均加速度为0.655m/s2,平均瞬时油耗为3.63mL/s;发动机转矩限制斜率为30N·m/s时平均加速度为0.65m/s2,平均瞬时油耗为3.4mL/s;发动机转矩限制斜率为18N·m/s时平均加速度为0.695m/s2,平均瞬时油耗为2.46mL/s。
因此,上述统计结果说明动态协调控制时随着发动机转矩限制斜率的下降,加速过程中的动态油耗呈下降趋势,加速度呈增大趋势。与无动态协调控制相比,提出的发动机转矩突变过程动态协调控制方法能够有效地降低加速过程中发动机的动态油耗,提高整车的动力性。
4 结论
本文中以某款重度混合动力汽车为研究对象,提出了一种基于转矩动态补偿的混合动力汽车发动机转矩突变过程动态协调控制方法。设计的基于斜率限制的发动机转矩控制策略避免了加速过程中动态油耗的增加。利用电机转矩动态响应速度快、控制精确的优点,设计了基于动态补偿的电机转矩控制策略,在有效降低动态油耗的同时保证了车辆的加速性能。实车试验结果表明,该动态协调控制方法能够同时改善混合动力汽车加速时的燃油经济性和动力性。
[1] 王存磊,殷承良,罗刚,等.ISG混合动力汽车起动及加速策略[J].内燃机学报,2012,30(1):79-85.
[2] Sasaki S, Takaoka T, Matsui H, et al. Toyota’s Newly Developed Electric-Gasoline Engine Hybrid Powertrain System[C]. EVS14:1-8.
[3] Michael Douba, Henry Ng, Robert Larsen. Characterization and Comparison of Two Hybrid Electric Vehicles(HEVs)-Honda Insight and Toyota Prius[C]. SAE Paper 2001-01-1335.
[4] 袁银男,王忠,梁磊,等.ISG混合动力汽车加速扭矩补偿策略与仿真[J].车用发动机,2009(1):27-30.
[5] 何建辉,何林.双离合器混合动力系统瞬态工况的仿真[J].中南大学学报,2011,42(1):73-79.
[6] 叶心,秦大同.胡明辉,等.ISG型中度混合动力轿车油门动态协调控制策略[J].重庆大学学报,2010,33(11):1-6.
