有腿机器人正在走来
2014-02-24刘焕松徐欣
刘焕松+徐欣
在伊拉克和阿富汗战争的推动下,无人作战系统得到迅猛发展,各国在无人作战系统的研制和采购上不惜大把投入资金。
当无人机广受关注之时,地面类似系统也赢得了阵阵喝彩。简易爆炸装置给部署在阿富汗的部队带来了最大威胁,这一事实使本来默默无闻的无人地面车辆走到了聚光灯下而引人瞩目。这些无人地面车辆每天从事“最危险”的任务,而且在执行任务时经常被损坏或丢失。如今无人地面车辆已不仅仅限于爆炸物处理,其任务范围正在扩大,开始承担起侦察甚至后勤任务。
但是,当前无人地面车辆面临的关键挑战是其还不能跟随士兵到任何要去的地方。尽管无人车具有一定的机动能力,但是其履带或轮式配置限制了它们的战斗使用。于是有腿机器人正在引起人们的关注。
有腿机器人有很多优势:非常适合崎岖的地形,能爬台阶、能越壕沟,能完成轮式和履带式机器人所不能完成的任务。
四足机器人:
班用步行保障系统
针对目前的无人车系统不能跟随士兵到想去的任何地方这一现状,美国海军陆战队与美国国防高级研究计划局合作,共同研制采用四足行进的“班用步行保障系统”,英文缩写为LS3。这一研究计划的目标是将机动能力与后勤能力整合在一个系统中,这个系统能够24小时不间断地将181kg的装备运送32km以上的距离,并且还能保障部队同步行动。

班用步行保障系统是在波士顿动力工程公司的“大狗”四足机器人基础上发展而来的。2012年12月,其在弗吉尼亚皮克特堡进行了试验,这是与美国海军陆战队作战试验室联合进行的为期两周的试验。该系统的4条腿上装有液压马达,马达上安装了监测关节位置和力度的传感器,而行走动作最终由操纵这些传感器的自带计算机控制。该系统可以在疏松、光滑和不平坦地面上奔跑并保持平衡,可以爬山,并且跌倒后还能自主爬起来。
试验期间,验证了系统的5种能力:执行语言指令、夜间行动、“传达”命令、探测环境、智能化脚的放置。
负责该系统的项目军官约瑟夫·希特指出,平台的稳固性和感知性是摆在系统面前的主要挑战,这不是个容易解决的问题。
机器人系统,不管是有腿的还是轮式或履带式的,要真正能在战场上使用,其对所部署环境的感知能力将是有效应用的一个关键因素。
“我们有了有腿的运载工具而且它能够记住它感觉到的地形的样子,所以,如果再遇到同样的地形它不必再花那么多时间去认识了,它已经记住了地形的特征。这是做得到的,但是难就难在地面环境可能太过复杂,比如有更多障碍物、更多可变的东西以及更多因素的相互影响,致使有腿系统会出现更多的故障类型,它们可能摔倒,载物可能掉下来,可能踢到障碍物,这些都在挑战我们的工作极限。”加拿大吉尔大学计算机科学系主任格雷戈里·杜德克教授如是说。他认为,“一个主要的挑战是提供系统在一定距离内的感知能力,不仅要知道机器人能否去某个地方,而且要知道能走多快。做出不同情况下的能力预测将是非常重要的”。
“非认知机器人是愚蠢的,因为它们会一次又一次地犯同样的错误,”荷兰代尔夫特理工大学机器人技术研究所彼得·琼克教授解释说,认知系统能学会认知,知道对象是什么及其属性。琼克教授说,认知是通过输入和输出之间的关联建立起来的,可通过提高机器人计算能力和增加存储器得以实现。“在过去10年或15年间我们确实没有这么巨大的存储能力,但现在我们已有G级的存储能力,因此我们能够将一切储存在一个对照表中并且运行。显然这与人类大脑的工作方式相似,而且范式是相同的”,琼克教授解释说。当然,增加存储器也可提高处理能力。
救灾机器人:演示功能应用
美国国防高级研究计划局在“机器人挑战赛”中率先推出了有现实应用能力的功能机器人,即救灾机器人。挑战赛中,机器人演示了感知能力、机动性和通用性多方面的功能,而且机器人要面对许多与人类有关的独特特性。
挑战性的任务包括:徒步越过碎石、清除门道堆积物、开门进入建筑物、爬上梯子然后穿过走道、用工具突破混凝土板、定位并关闭靠近泄漏管道的阀门、替换诸如水泵等部件。国防高级研究计划局没有公布有关机器人应该具备的自主水平的信息,但声称在开展比赛时以自主方式应对挑战和在任务层面控制机器人——例如派机器人自主开门而不是提供步进指令来具体引导。在挑战赛中,国防高级研究计划局还对通信链路质量进行调控,逐渐减弱通信信号,以评估机器人如何应对这种情况。
有腿机器人:技术尚待突破
国防高级研究计划局“机器人挑战赛”方案似乎指出了竞赛中机器人的类人结构形式,但并没有硬性规定要如此,虽然许多参赛队提供的系统的确采用了有腿类人设计。
机器人类人方案有两大关键优势:一是形式上适合于在为人类设计的环境中行动;二是人们更倾向于接受类人机器人。
来自卡内基梅隆大学国家机器人工程中心的一个团队发布了其机器人细节。卡内基梅隆大学的高智能移动平台采用人身大小机器人的形式,依靠其四肢的每个肢体上的橡胶履带移动。该高智能移动平台必要时也可以只用两肢上的履带来移动,例如当需要用其余肢体进行挑战性的作业时。
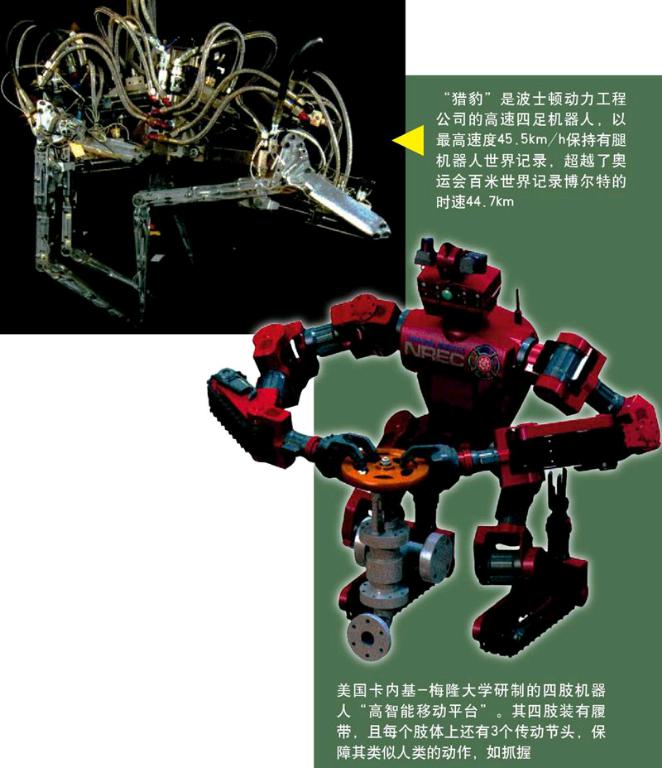

高智能移动平台的每个肢体终端各有1个操纵装置,可用来操纵物件,不影响履带运动。此外,它还有一大亮点,就是接近人类的力量和熟练程度。
高智能移动平台每个肢体上还有3个传动节头,保障其类似人类的动作,如抓握动作。其他重要特征包括采用多模式头部和联合传感器,为系统提供反馈信息,从而使机器人能够以安全的方式运动、处理物件和清除杂物。
波士顿动力工程公司发布了其高速四足机器人“猎豹”,据称,“猎豹”以最高速度45.5km/h保持有腿机器人世界记录,超越了奥运会百米世界记录博尔特的时速44.7km。
许多其他仿生系统已在研制中,其中包括从蟑螂和竹节虫得到灵感的设计。许多机器人还具有爬墙能力,并以其多腿结构提供超高级的机动性和稳定性。
尽管国防高级研究计划局机器人挑战赛的任务似乎偏好于类人机器人机动,但这会大大提高复杂程度、计算需求和功率消耗。
当前,电力需求可能给有腿系统提出了最大的工程设计挑战,有腿系统的复杂设计需要消耗很大的电力,而且现在的能源技术还不能满足这一需求。班用步行保障系统应对这种挑战采用了一种常规内燃机,但这并不适用所有系统,还需要电池技术的长足进步。
除电源外,有腿机器人的发展还面临着传感器、光探测技术的制约。
有腿机器人的发展还只是刚刚起步,我们将对这种新型机器人继续关注。endprint
