基于视觉序列图像分析的药室参数测量
2014-02-23王会峰王晓艳王炳健关丽敏汪贵平
王会峰,王晓艳,王炳健,关丽敏,汪贵平
(1. 长安大学 电子与控制工程学院,陕西 西安710064;2. 西安电子科技大学 物理与光电工程学院,陕西 西安710071)
0 引言
药室是放置药筒、紧塞具和发射药并保证发射药燃烧的空间。药室容积等火炮静态参数指标直接影响装填密度、膛压和初速值,进而影响射程、弹道轨迹、弹着点轨迹、弹丸着点的精度和发射安全性[1-2]。因此,有必要对药室参数进行及时检测。目前国内的药室参数测量方法主要有注水法、音频检测法[3-5]及激光光源投射法[6-10]等,但这些方法都存在着操作复杂、效率低、精度不高或参数单一等缺点,不能满足现代靶场对药室高效、高精度自动化检测的需求。
本文提出了一种以视觉读数和精密机械定位为核心的交叉直径间接式药室参数高精度测量方法。这种基于图像的测量与其他测量技术相比有如下4 个方面的优点:一是非接触性;二是精度高;三是直观且信息量大;四是自动化程度高和操作方便。
1 药室结构特点和视觉读数测量系统
1.1 药室结构特点
药室为多段锥体结构,如图1 所示,包括多个圆锥体部分和一个过渡圆锥体部分等。随着炮弹发射数目的增多,药室直径和锥体都会发生变化,过渡锥体的位置会往身管方向延伸,使药室的容积增大。由于其形状不规则,因此药室的直径、长度、容积、锥度、拐点等是需要测量的静态参数。

图1 药室截面示意图Fig.1 Schematic diagram of chamber section
1.2 视觉读数药室测量系统组成
系统主要由上位机、进深精密驱动及控制机构、测量头(含弹性三爪定中装置、CCD 像机、成像标尺靶、场景照明系统)和管尾辅助装置等部分组成。功能框图如图2 所示。进深精密驱动控制器推动测量头按照上位机的指令沿药室轴线以相应的步长前进,在药室内壁的作用下双直径弹性测量触头发生相对位移。上位机通过CCD 像机采集其图像信息,对获取的图像等信息进行处理得到直径测量结果,并结合进深,获取其他测量结果,最终以字符、图形等形式显示在界面上。

图2 药室参数测量系统功能框图Fig.2 Block diagram of measuring system functions
测量头是直径视觉读数的核心部件,其中的成像标尺靶为两对十字交叉的精密刻划标尺,它可将药室直径的微小变化量通过机械传递转换为标尺图像的相对运动,从而获取准确的直径信息。为了得到准确的直径值,测量头的定中精度是关键。测量头定中装置是一种稳定三爪弹性定中机构。经测试发现该结构定中误差小于10 μm,对双标尺测量爪的直径测量误差影响甚微。
药室测量系统原理如图3 所示。测量开始时,测量头在进深驱动机构的驱动下沿轴线带动两对交叉的测量触头首先进入高精度标定环,并在标定环中进行测量以获得基准尺寸,然后从药室的底缘端面进入药室内部并开始步进测量。高精度进深机构上的光栅尺记录进深距离Li,上位机通过CCD 像机采集标尺靶图像序列,以获得若干组直径数据,再结合高精度进深数据,根据药室各静态参数的定义,获得相应的药室静态参数。

图3 药室测量系统原理结构示意图Fig.3 Principle structural diagram of measuring system
2 药室静态参数测量与获取
2.1 药室直径和进深的测量
高精度的直径是其他参数获取的基础,也是通过视觉读数直接得到的一个参数。每个截面直径数据分两组,其最终值由两个方向的平均值得到,以消除误差。每组均由基准直径和相对直径获得,则各个截面的当前直径为

式中:Di为第i 个截面的当前直径;Db为基准直径;ΔDi为第i 截面当前直径相对定标环直径的变化量,此处ΔDi可表示为

式中:ΔDih、ΔDiv为第i 个截面的交叉直径变化量。
进深是以后端面为起始的沿轴向的深度,它的起始和终止值之差可以代表药室长度。由于进深精度可以由光栅保证,其误差小于10 μm. 进深采用变长步进方式,每一步用Li来表示。
2.2 药室容积获取
容积可以根据每一步的进深和直径测量结果计算求得。首先根据各个测量截面的直径和进深,计算出第i 个锥台体积为

式中:Li为第i 个锥台长度;Di为第i 个锥台上端直径;Di+1为第i 个锥台的下端直径。则药室容积V为

理论上,N 值越大,精度也越高,但测量时间就越长,因此在满足容积精度的前提下选较大步长可以提高测量效率。在系统中依据直径的变化自动调整步长,实现等精度测量。
2.3 拐点与锥度的计算
由于炮弹多次发射使内壁磨损拐点准确位置和锥度准确值已难以通过实测得到。
采用残差剔除直线多次拟合的方法[11]找到各锥段内壁的拟合直线(如图4 所示),求取相邻锥段拟合直线的交点坐标(直线Li和Li+1),就可得到各拐点的轴向位置,同时可根据所拟合的直线计算锥度值。图4 中di代表实测的直径;Li和Li+1表示拟合的各锥段内壁直线;Ci表示第i 个拐点的轴向位置坐标(限于篇幅,详细计算公式不赘述)。

图4 拐点及锥度计算Fig.4 Calculations of inflexion and taper angle
可见药室参数测量中变化的内径和进深测量是关键,其他的参数精度都依赖于这两个参数的测量[12],其中进深精度可由高精度光栅保证,所以快速准确获取高精度的直径值是测量的重心。
3 双直径药室视觉读数靶设计
根据药室的结构特点,考虑到药室内部的特殊环境和结构,设计了药室参数测量的交叉双直径读数测量头,其结构如图5 所示。

图5 测量头变直径视觉读数部Fig.5 Double diameter reading head for chamber parameter measurement
测量头本体前后两端是弹性三爪定中装置,它能够保证测量头在药室内部不同直径处都保持高精度定中。在测量头本体中间部位安装两对交叉的测量爪,测量爪内部弹簧可以保证测量爪的触头紧贴药室内壁,在测量爪的另一端固定一个精密刻画的标尺。当驱动装置驱动测量头沿着轴向在药室内部移动时,触头在管内壁的作用下运动,进而带动两对测量标尺也相对运动。两对测量标尺靶的图像通过CCD 像机拍摄。图6 是现场拍摄到的一幅测量标尺靶图像,其刻线之间的实际间距是1 mm.

图6 药室标尺靶面图像Fig.6 Scale target plane image of chamber
由图6 可见,由于成像环境的特殊性,所得到供测量的图像质量并非很高,因此从各标尺中准确地提取刻线的位置是先要解决的关键问题。另外,如何从一对标尺的相对运动的多幅图像中得到准确的直径是测量的另一个难题。
4 靶面图像标尺准确定位算法
图像处理的最终目标是得到内腔的直径参数,而获得直径参数的第一步是要从标尺靶面图像中提取各标尺刻线的准确位置。为了能够提取图像中标尺的准确位置,对图像的去噪、增强、畸变校正等预处理必不可少。本文主要研究标尺图像准确定位算法。
在图像测量系统中,测量精度在很大程度上取决于用于测量的CCD 的像素分辨率和测量分辨率两个因素的制约[13],根据

式中:Δh、Δv 表示CCD 水平与垂直方向上的像素尺寸;f 代表CCD 采样率;k 代表光学放大倍数;nx代表CCD 水平有效像素数;tx代表电视正程时间。可见,在光学参数既定的条件下提高CCD 的像素分辨率是改善系统测量精度最直接的方法。
由于每个标尺是间隔1 mm 的均匀刻线,摄像机的像平面和标尺靶的靶面平行,因此均匀间隔的平行线成像后仍然是一组平行直线。采用平行直线拟合法进行平行直线的拟合,不仅可求出一个标尺中每一条直线的准确位置,而且可求解标尺中各刻线之间的准确值。设参与拟合的特征直线方程为

式中:θ 为直线与极轴夹角;d1,d2,…,dm代表极径。
利用最小二乘法,构造目标函数

式中:m 为参与拟合的直线条数;每条直线参与拟合的点数为n1,n2…,nm;p1,p2,…,pm为各条直线的点集。
记:

令:


求出dj,进而可求得各条拟合直线的方程。
对图5 中上半平面的水平标尺进行平行直线拟合,得到各平行直线的参数如下:sin θ= -1 ;cos θ⋍0;d1=341.653 6;d2=434.879 8. 拟合后如图7 所示,可见,经平行线拟合可准确地得到标尺上各条直线的方程,同时可获得亚像素级的直线参数。

图7 标尺平行直线拟合Fig.7 Parallel line fitting of the scales
5 序列图像处理的靶标读数法
完成标尺的准确定位后,还需要从动态靶面图像中读取测量爪移动的相对位移。为了能够准确读取标尺移动的相对位移,利用测量中的序列图像设计了一种相对位移读数法。
5.1 标尺读取区域的选取
为了能快速准确读数,首先在水平和垂直方向上以靶面中线为中心各取一个区域,在该区域内至少出现两条刻线,最多出现3 条刻线。图8 给出了水平方向标尺的区域框。由于刻线成像后间距约占93 个像素,因此在水平方向上取的区域范围是100 个像素(图8 中的两个白色框为读取数据的图像区域),这样选取读数区域必须要求相邻两帧图像靶面标尺移动的范围内至少有一条刻线不会移出读数区域,也就是标尺移动的范围不超过93 个像素,要求两个标尺的径向位移都小于1 mm. 竖直方向选取方法类似。

图8 水平方向刻线区域Fig.8 Scribed line area in horizonal direction
5.2 基于序列图像的数据读取
以水平方向为例,要通过序列图像判断标尺移动的方向和移过的位移量。当读数区域仅有两条刻线出现时,在该区域内至少出现两条直线。前后两帧标尺图像可分为以下3 种情况:
1)当区域的中心线始终在两条标尺线之间时(标尺移动中不跨越区域中心线),如图9 所示,可以分别求取前后两帧图像中心线到两个标尺的距离,则标尺移动的位移li可以表示为

为提高精度,取li和的绝对值平均值,在(12)式中如果规定正向测量li>0 或<0 表示标尺左移,li<0 或>0 则表示标尺右移,若li=0 或=0 表示标尺不动。
2)当区域的中心线不是始终在两条标尺线之间时(标尺移动跨越区域中心线),如图10 所示。
由于标尺左右移动在选择测量参数时既定,首先判断两帧图像中区域内直线的位置,仍然计算(12)式中的li或,这时相邻两帧图像中线左边标尺li<0,而既定的标尺是左移动的,说明标尺跨中心线。计算标尺左移的位移公式如下:

图9 标尺位移示意图Fig.9 Schematic diagram of scale displacement

图10 标尺跨越中心线Fig.10 Scale over the central line

或

同样取li和l'i绝对值的平均。
3)当移动始末中心线和标尺重合时,如图11所示,可以把与中心线重合的标尺作为计算标尺,上述公式仍然适用。
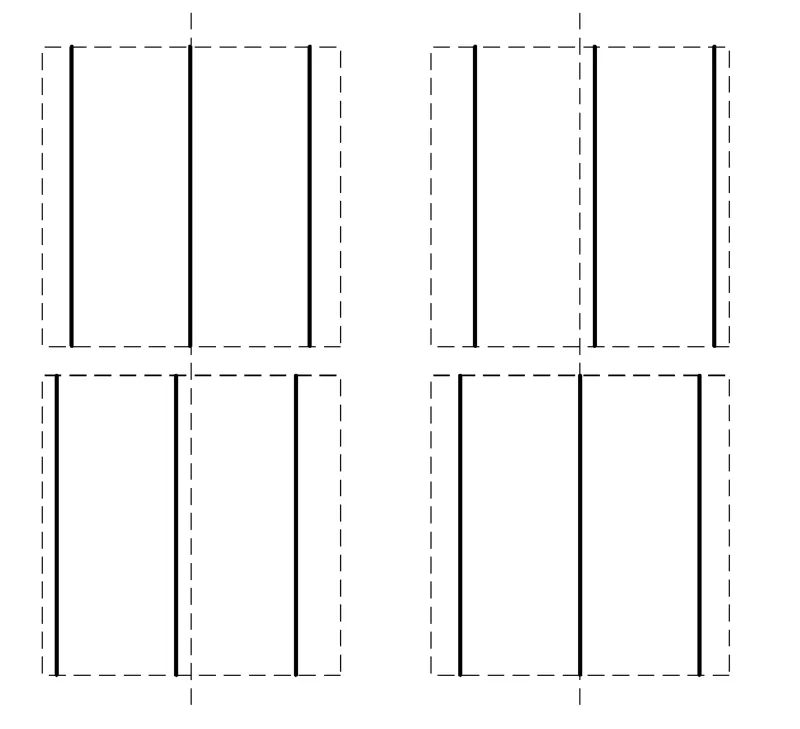
图11 标尺与中心线重合Fig.11 Coincidence of scale with central line
6 实验结果
用设计的样机(见图12)用高精度光栅尺作为标定基准对测爪进行测试。图13 是高精度光栅触头和测爪移动30 mm 过程测爪的相对误差曲线图。
由图13 可见,测量过程中各测爪的测量误差绝对值小于5 μm,满足系统的测量精度要求。
用样机来实测某型火炮药室,上位机软件用VC++6.0实现,测量过程中在主界面绘制直径随进深的变化曲线,如图14 所示。

图12 药室参数测量系统Fig.12 Measuring system for chamber parameters

图13 测爪的相对误差Fig.13 The relative error of measurement claw
由于进深由光栅测量,精度较高,而直径测量通过标尺刻线的拟合可达到亚像素级。结合第4 节,其理论测量误差小于2 μm,实际测量能保证在10 μm 以内。参照文献[2]容积计算误差传递规律和文献[14]插值法,其容积测量误差在2‰以内。表1 给出了各种测量方法主要参数的误差。

图14 某火炮药室参数测量系统主界面Fig.14 Home screen of chamber paraments measuring system

表1 测量参数误差比较Tab.1 Comparison of measurement parameter errors
7 结论
通过对药室测量的研究,提出了一种基于视觉读数标尺靶的测量方法,分析了基于序列图像处理和平行直线拟合的高精度数据读取,并通过实测验证了系统的测量精度。该系统将图像处理和标尺靶设计结合起来,准确而方便地获取了系统的测量值,对同类系统乃至其他系统有一定的参考价值和应用前景。
References)
[1]张淑娴.变锥度管道静态参数光电测量技术研究[D]. 西安:西安电子科技大学,2010:1 -50.ZHANG Shu-xian. Study on photoelectronic image measuring technology for static parameters of variable taper tube[D]. Xi’an:Xidian University,2010:1 -50.(in Chinese)
[2]韩宝君,卢泉,王会峰,等.基于交叉光栅的容积测量方法及误差分析[J].兵工学报,2010,31(4):499 -504.HAN Bao-jun,LU Quan,WANG Hui-feng,et al. Volume measurement error analysis and method based on crossing dual gratings[J].Acta Armamentarii,2010,31(4):499 -504.(in Chinese)
[3]郑浩,刘思海,乔琚瑶.一种改进的弹体药室容积音频检测仪[J].仪器仪表学报,2006,27(6):238 -240.ZHENG Hao,LIU Si-hai,QIAO Ju-yao. Modified sonic tester for bomb chamber volume[J]. Chinese Journal of Scientific Instrument,2006,27(6):238 -240.(in Chinese)
[4]柏逢明. 音频检测技术[M]. 北京:中国科学技术出版社,2005:1 -30.BAI Feng-min. Audio detection technology[M].Beijing:Chinese Science and Technology Press,2005:1 -30.(in Chinese)
[5]柏逢明,潘毓学,马莉.音频检测弹体药室容积的研究[J].兵工学报,1998,19(2):167 -170.BAI Feng-ming,PAN Yu-xue,MA Li. Study in sonic testing for bomb chamber volume[J]. Acta Armamentarii,1998,19(2):167 -170.(in Chinese)
[6]张文伟,张延忻.基于环形光切图像法的管内壁激光测量系统[J].计量学报,2001,22 (4):284 -287.ZHANG Wen-wei,ZHANG Yan-xin. Laser measuring system for the Iinner wall of a pipe based on ring optical cutting image method[J].Acta Metrologica,2001,22(4):284 -287.(in Chinese)
[7]Zhang W W,Zhuang B H. Non-contact laser inspection for the inner wall surface of a pipe[J]. Measment Science and Technology,1998(9):1380 -1387.
[8]王坚,单长胜. 一种药室参数测量新方法[J].测试技术学报,2006,20(1):27 -40.WANG Jian,SHAN Chang-sheng. A new measurement method of chamber parameters[J]. Journal of Test and Measurement Technology,2006,20(1):27 -40.(in Chinese)
[9]郑军,徐春广,荆佩忠,等.基于环形激光的深孔内膛形貌检测系统研究[J]. 光电工程,2004,31(1).32 -35.ZHENG Jun,XU Chun-guang,JING Pei-zhong,et al. A study on a detection system based on ring laser used for inner wall of deep hole[J]. Opto-electronic Engineering,2004,31(1):32 -35.(in Chinese)
[10]王坚,任现君,苏建刚. 基于激光投影法的火炮身管内膛此疵病深度测量[J].中国测试技术,2004,30(5):16 -18.WANG Jian,REN Xian-jun,SU Jian-gang. Measurement for the flaws in the inner wall of a artillery pipe based on laser projection method[J].China Measurement Technology,2004,30(5):16 -18.(in Chinese)
[11]王会峰,牛建军,刘上乾,等. 一种成像测量靶面同心圆的自适应检测算法[J].光子学报,2008,37(10):2095 -2098.WANG Hui-feng,NIU Jian-jun,LIU Shang-qian,et al. A new concentric circles adaptive high accuracy detection algorithms in measurement based on image[J]. Acta Photonca Sinica,2008,37(10):2095 -2098. (in Chinese)
[12]冯忠伟,徐春广,肖定国,等. 基于环形结构光的药室容积测量技术[J].仪器仪表学报,2009,30(6):1169 -1174.FENG Zhong-wei,XU Chun-guang,XIAO Ding-guo,et al. Volume measurement for powder based on ring structured light[J].Chinese Journal Scientific Instrument,2009,30(6):1169 -1174.(in Chinese)
[13]冷何英,戴俊钊.实用亚像元定位方法研究[J]. 红外与激光工程,2000,29(2).15 -18.LENG He-ying,DAI Jun-zhao. Applied arithmetic research of sub-pixel orientation[J]. Infrared and Laser Engineering,2000,29(2):15 -18. (in Chinese)
[14]王会峰,刘上乾,汪大宝,等. 三次样条插值在变径内腔重建中的应用[J].中北大学学报:自然科学版,2010,31(1).65 -70.WANG Hui-feng,LIU Shang-qian,WANG Da-bao,et al. Application of cubic spine interpolation to variable-diameter lumen surface reconstruction[J]. Journal of North University of China:Natural Science Editon,2010,31(1):65 -70. (in Chinese)