电机控制系统主电路及驱动电路的设计
2014-02-20阴丽华曾显恒
阴丽华,曾显恒
(河南职业技术学院,河南 郑州 450000)
电机控制系统主电路及驱动电路的设计
阴丽华,曾显恒
(河南职业技术学院,河南 郑州 450000)
本文中选用的无刷直流电动机的电机本体采用星形连接的三相对称绕组,同时功率器件组成的逆变器为桥式电路。文章主要叙述了控制系统的硬件电路设计过程。以EasyARM2100开发板为核心的控制单元,主电路及驱动单元行了阐述,并对硬件设计也作出了相应的解释。
主电路;功率器件;驱动电路;驱动板
CLC NO.: U463.6 Document Code: A Article ID: 1671-7988(2014)10-79-03
前言
对于控制系统的主电源来说,本系统采用的是直流供电,在实际应用中的电动汽车使用的也是直流供电。本系统的直流电源为300V,可以串联蓄电池获得,也可以经过交流电进行整流获得。系统主电路如图1所示。
1、功率器件的选取
由于无刷直流电机PWM调速时要求较高的开关频率,因此,对开关元件的驱动电路提出了如下要求:改善开关元件的开关特性,减少开关时间;减少驱动功率,提高驱动效率;对开关元件的过流提供快速、可靠的保护。
随着电力电子器件的发展,快速关断器件如门极可关断晶体管GTO、功率双极型晶体管GTR、金属氧化硅晶体管MOSFET和绝缘栅双极晶体管IGBT等相继开发成功。其中IGBT是集MOSEFT和GTR优点于一身。即具有少子器件GTR的通态压降低、耐压高、可承受大电流等优点。又兼有多子器件MOSFET的开关速度快、热稳定好、无二次击穿、输入阻抗高、驱动微功耗的长处。因此倍受青睐。尤其是在电机控制、中频和开关电源以及要求快速、低损耗的领域发展迅速。在大功率全桥变换中。IGBT作为功率开关元器件是非常适合的。
IGBT是一压控器件。它所需的驱动电流与驱动功率非常小,可直接与模拟或数字功能块相接,不需加任何附加接口电路而且转换功率也大大提高。IGBT的导通与关断是由栅极电压UGE来控制的。当UGE大于开启电压UGE时。IGBT
导通。当栅极和发射极间施加反向或不加信号时,使得IGBT关断。
本研究选用FS400R12KF4为驱动器件,FS400R12KF4基本参数:400A/1200V/6U。图2为功率器件。
2、IGBT驱动电路工作原理
本系统采用了EXB系列中的EXB841驱动模块。图3为驱动模块的外形图。EXB841是日本富士公司提供的300A/1200V高速型IGBT专用驱动模块。其最高工作频率为40kHz:单20V电源供电,内部自己产生-5V的反偏电压:具有过流保护和软关断功能。
从图4和图5看出,EXB841主要由放大、过流保护、5V基准电压和输出等部分组成。其中放大部分由TLP550、V2、V4、V5和R1、C1、R2,、R9组成,TLP550起信号输入和隔离作用,V2是中间级,V4和V5组成推挽输出;短路过流保护部分由V1、V3、V6、VZ1和C2、R3、R4、R5、R6、C3、R7、R8、C4等组成,实现过流检测和延时保护功能。EXB841的6脚通过快速恢复二极管接至IGBT的C极,检测IGBT的集射之间的通态电压降的高低来判断IGBT的过流情况加以保护;5V电压基准部分由R10、VZ2、C5组成,为IGBT驱动提供-5V反偏压。表1为EXB841的各端子。
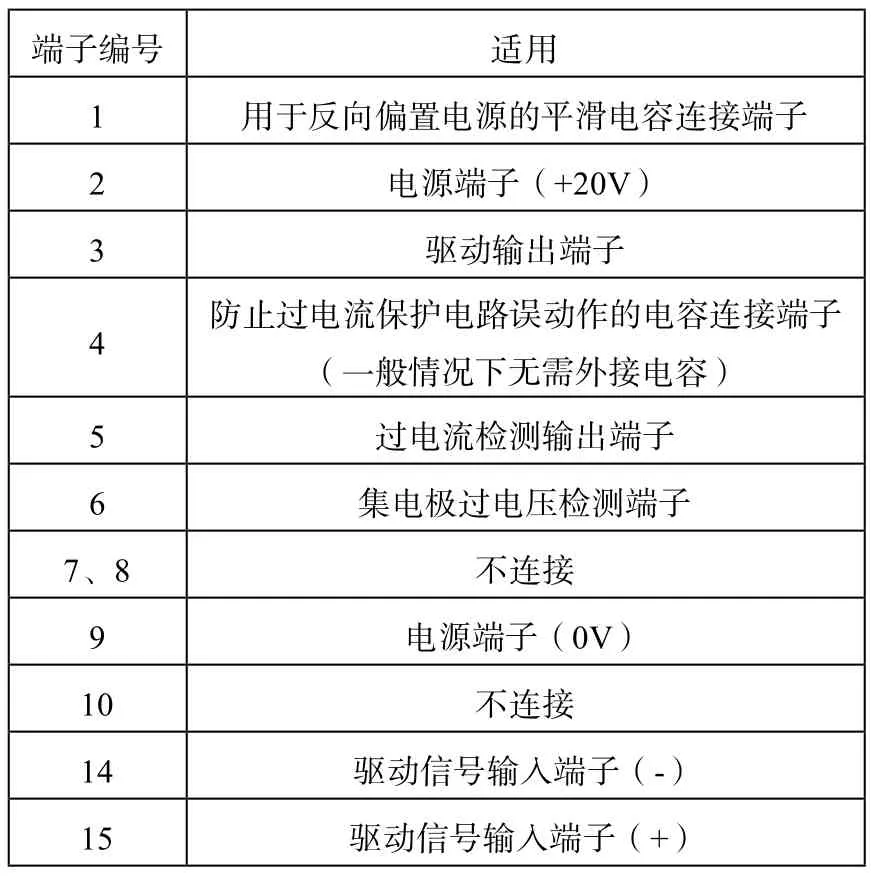
表1 EXB841端子
(1)正常开通过程
当控制电路使EXB841输人端14和15脚有10mA的电流流过时,光耦TLP550导通,A点电位迅速下降至0V,使V1、V2截止;V2截止使D点电位上升至20V,V4导通V5截止,EXB841通过V4及栅极电阻R,向IGBT提供电流使之迅速导通,IGBT的VCE下降至3V,与此同时,EXB841的V1截止使+20V电源通过R3向电容C2充电,使B点电位上升,它们由零上升到13V的时间为2.54sμ,由于IGBT约1sμ后已导通,VCE下降至3V左右,从而使EXB841的6脚电位特制在8V左右,因此B点和C点电位不会充至13V,而是充至8V,稳压管VZ1的稳压值为13V,IGBT正常开通时不会被击穿,V3不通,E点电位仍为20V,二极管VD6截止,不影响V4,V5的正常工作。
(2)正常关断过程
控制电路使EXB841输人端14,15脚无电流流过,光耦TLP550不通,A点电位上升使V1,V2导通;V2导通使V4截止,V5导通,IGBT栅极电荷通过V5迅速放电,使EXB841
的1脚电位迅速下降至0V,使IGBT可靠关断,VCE迅速上升,使EXB841的6脚“悬空”。与此同时V1导通,C2通过V1更快放电,将B点和C点电位箱制在0V,使VZ1仍不通,后续电路不会动作,IGBT正常关断。
(3)过流保护
设IGBT正常导通,则EXB841中V1和V2截止,V4导通,V5截止,B点和C点电位稳定在8V左右,VZ1不被击穿,V3不通,E点电位保持在20V,二极管VD6截止。若此时发生短路,IGBT承受大电流而退饱和,VCE上升很多,二极管VD7截止,EXB841的6脚“悬空”,B点和C点电位由8V上升,当上升至13V时,VZl被击穿,V3导通,C4通过R7和V3放电,E点电位逐渐下降,二极管VD6导通使D点电位也逐渐下降,从而使EXB841的3脚电位也逐步下降,慢慢关断IGBT。
3、驱动电路驱动板的设计
3.1 驱动板的电源电路
驱动模块使用的供电电压为20伏,而驱动板的供电为24伏,内部需要加设电源电路,以此来稳定驱动模块的供电电压。首先,由接口提供24伏的直流电压,经过电容滤波,再使用芯片7818将电压降至18伏,因为三个二极管D29、D30、D31和电容的作用,电压被稳定为20.1伏左右。以此为驱动板内的各驱动模块供电。图6所示。
3.2 驱动模块的驱动电路
驱动电路的设计如图7。
驱动电路的内部原理前面已经叙述过了,在这里就不再重复,需要说明的有以下几点:
①驱动板内共有驱动这样的驱动应用电路6个,分别用来驱动功率器件内的6个IGBT;
②驱动信号来自处理器芯片的PWM引脚或I/O引脚;
③本电路中IGBT栅极进行了保护设计,D11和D12两个反向连接的稳压管可以保证VGE在-5V—+15V之间;
④驱动芯片EXB841的6脚(集电极电压监测端)输出串接一个稳压管和二极管接到IGBT集电极。集电极电压监测端的主要作用是进行前面我们所讲的过电流保护的。
[1]PHILIPS公司.LPC2114/2124/2212/2214UserManual[N].PHILIPS公司,2004:80-89.
[2]王田苗.嵌入式系统设计与实例开发-基于ARM微处理器与uC/OS-II实时操作系统[M].北京:清华大学出版社,2003:154-168.
[3]田泽.嵌入式系统开发与应用[M].北京:北京航空航天大学出版社,2005:150-190.
[4]王晓明,王玲.电动机的DSP控制[M].北京:北京航空航天大学出版社,2004:13-24.
[5]杨兴瑶.电动机调速的原理及系统[M].北京:水利电力出版社,1995:52-78.
[6]周立功等.ARM嵌入式实验教程(一)[M].北京:北京航空航天大学出版社,2005:105-140.
Design motor control system of the main circuit and driver circuit
Yin Lihua, Zeng Xianheng
(Henan Vocational and Technical College, Henan Zhengzhou 450000)
Motor body chosen in this article brushless DC motor using three phase windings star connected while power device is composed of an inverter bridge circuit. The article describes the control system hardware circuit design process. In EasyARM2100 development board for the core of the control unit, the main circuit and the drive unit line described, and hardware design also made corresponding explanation.
The main circuit; Power Device; Drive circuit; Driver Board
U463.6
A
1671-7988(2014)10-79-03
阴丽华,就职于河南职业技术学院,研究方向车辆工程。