日本机器人最新专利摘要选编
2014-02-14
一、【发明名称】机器人手及搬运装置
【专利编号】JP 2014-50940 A
【公开日期】2014 年3 月20 日
【申请人】丰田汽车株式会社
本发明提供一种能够在各种情况下抓握工件的机器人机械手。
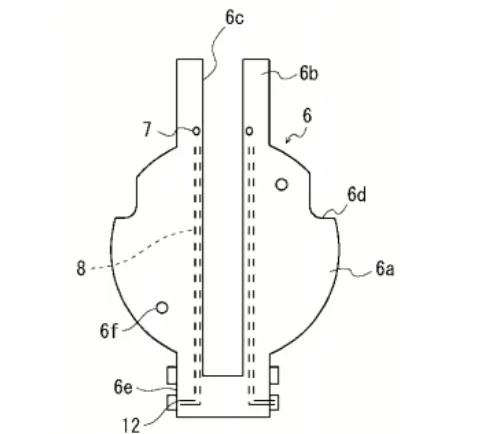
在半导体生产过程中,需要机器人机械手传送硅片,本发明采用真空吸附的方法,机器人机械手6 是吸附和保持工件的机械手,在机械手6 的一个主面上制作多个第1 吸气孔7 以及和7 连通的第1 真空通路8,在机械手6 的另外一个主面也制作有同样的结构。采取这样的机构,即使其中一个真空通路出现故障,另外一个通路也能将工件吸附保持住,防止工件从机械手上掉下来。
【选择附图】硅片传送装置概略图
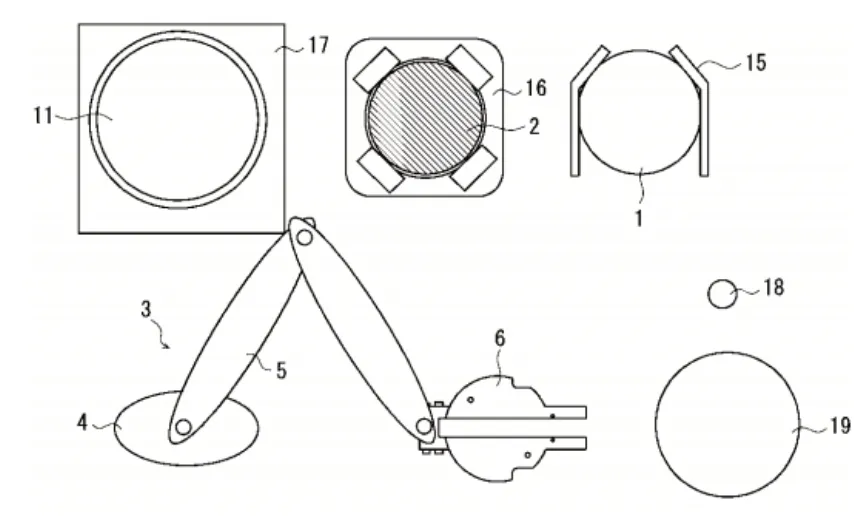
机器人机械手的正上方图
【图中符号说明】
1:硅片
2:光刻掩膜
3:传送装置
4:机座
5:机器人机械臂
6:机器人机械手
11:托盘
15:硅片盒
16:硅片盒
17:托盘架
18:旋转机构
19:工作台
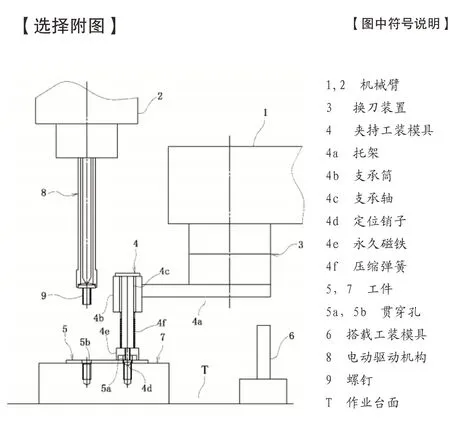
二、【发明名称】多关节机器人工件的定位与装卸方法
【专利编号】JP 2014-108496 A
【公开日期】2014 年6 月12 日
【申请人】川田工业株式会社
【摘要】本发明提供一种简单的工装模具和简单的动作控制方法,能够有效地对随机放置的工件进行定位。多关节机器人的机械手在拾取随机位置和随机姿势放置的工件时,需要事先确定工件定位的基准面,制作能够沿基准面轴线旋转夹持工件的夹持工装模具,以及规定位置尺寸、形状、姿态的搭载工装模具。在操作过程中,首先由夹持工装模具将工件夹持住,再将工件移动到搭载工装模具处定位,然后再移动到工作台面进行加工。
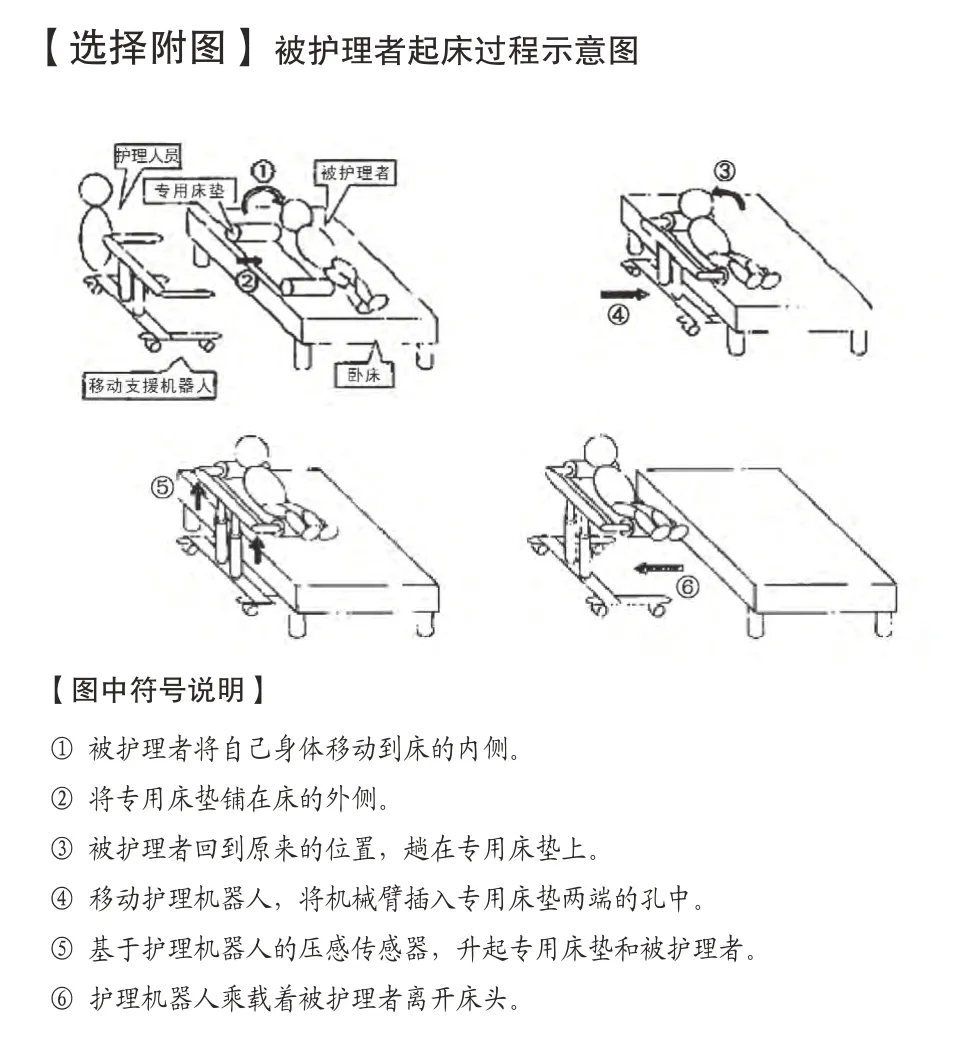
三、【发明名称】一种移动机器人护理方法
【专利编号】JP 2014-61035 A
【公开日期】2014 年4 月10 日
【申请人】日本马斯洛株式会社
【摘要】本发明提供一种简易而且能够减轻护理人员负担、特别是在移动被护理者时的护理方法和护理机器人。
本发明由移动机器人和专用床垫组成,专用床垫两端具有机器人机械臂能伸进去的机构,专用床垫铺设在被护理者床的一侧,被护理者需要起床时,转身趟在专用床垫上,机器人机械臂向前定位移动,将机械臂伸入专用床垫两端,将床垫升起并向后移动,移动到被护理者所需要到达的处所。
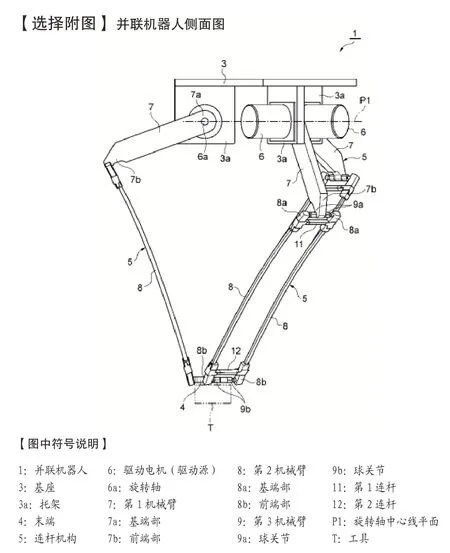
四、【发明名称】并联机器人
【专利编号】JP 2014-61558 A
【公开日期】2014 年4 月10 日
【申请人】伊西达株式会社
【摘要】并联机器人作为工业机器人,其基本结构是在基座和末端之间并行倒挂着三组连杆,通过这三组连杆机构的运动,能够相对基座调整末端的位置和姿态(位姿),使安装在末端的工具对作业对象施行加工。
本发明提供一种能够在箱内灵活操纵工具的并联机器人。并联机器人由以下各部件组成,基座3、能够装卸工具T 并且相对基座3 移动的末端4、挂在基座3 和末端4 之间至少有3组连杆机构5。各连杆机构5 具有安装在基座3 上的驱动电动机6、连接在驱动电动机6 上的第1 机械臂7、在第1 连接部上和第1 机械臂7 连接而且在第2 连接部上与末端4 连接的第2 机械臂8。第2 机械臂8 至少有从第2 连接部到第1 连接部的延伸部分。