H2/H∞混合控制器对异步电动机扰动研究
2014-02-11罗亚琴付铮铮姚均天
罗亚琴,付铮铮,姚均天,杨 宜
(中机国能电力工程有限公司,上海 200061)
H2/H∞混合控制器对异步电动机扰动研究
罗亚琴,付铮铮,姚均天,杨 宜
(中机国能电力工程有限公司,上海 200061)
研究异步电动机的控制,针对异步电动机模型的不确定性问题,首先将其线性化,然后将H2/H∞控制器应用于异步电动机的调速系统中,将异步电动机调速系统的性能要求转化为混合H2/H∞控制器的设计问题。提出将基于H2/H∞控制器参数的设计方法运用到异步电动机控制系统中,很好地保证了负载等外部因素扰动情况下的系统鲁棒稳定性,保证闭环系统具有的动态和稳定性能,很好的保证了异步电动机对扰动的稳定性。
H2/H∞控制器;电机传动;线性化;扰动控制
0 引言
随着经济的快速发展,异步电动机的传动控制已经广泛地应用于各行各业中,因此其运行也成为现代控制研究的热点之一。传统的控制方法包括PID等已经逐渐不能满足生产工艺对异步电动机控制系统精度的要求,为了提高系统的控制精度,增强系统的鲁棒性,研究人员将现代控制方法与已有的控制策略相结合,提出了异步电动机运行的多种控制方法[1]。
异步电动机结构较复杂,参数具有不确定性,它的控制对象是个不确定的对象模型,异步电动机在经济生产中具有非常重要的作用,因此保证它的安全及稳定的运行具有非常重要的意义,且在异步电动机控制器的设计过程中迫切需要解决它的不确定性问题。本文中将线性反馈化异步电机,鉴于H2/H∞控制算法对外部扰动和模型的不确定性具有较强的鲁棒性,将混合H2/H∞控制器运用到异步电动机控制系统中,对异步电动机进行转速控制,使输出转速在负载等扰动的情况下保持一致性。
1 异步电动机数学模型及其状态反馈线性化
考虑感应电机的五阶模型[2]:

限于篇幅,下面的模型推导及其符号说明见文献[3]。根据微分几何理论,引入下面非线性变换:

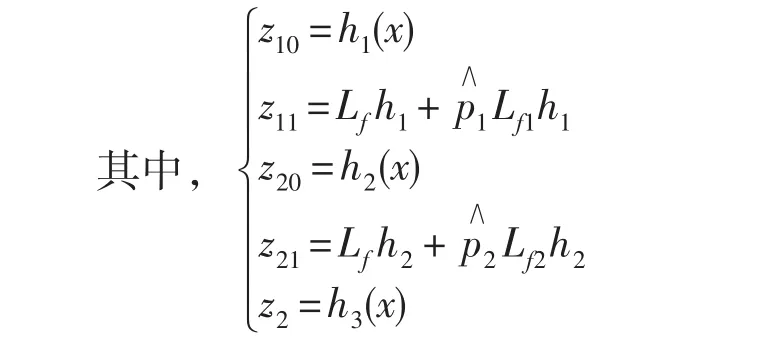

并反馈线性化得:

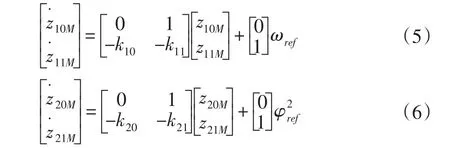
按照稳态情况下干扰项产生的误差为零原则,选择如下的参考模型:
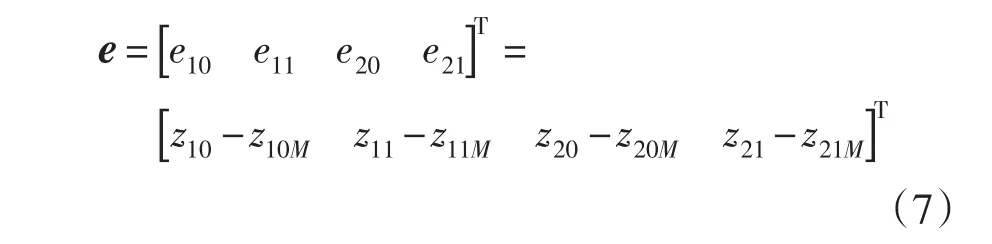
定义系统状态偏差如下:
则状态偏差微分方程如下:
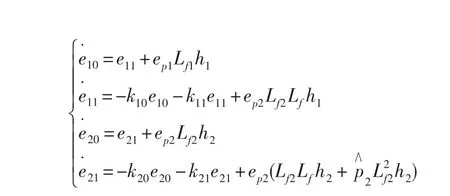
误差模型写成矩阵形式为

2 混合H2/H∞控制器的设计
考虑如下的线性系统

其中,x(t)∈Rn为状态;ω(t)∈Rm为扰动输入;u(t)∈Rq是控制输入;z2∈Rl,z∞∈Rp为系统被调输出;E∈Rn×n,A,B1,B2是系统适维常数矩阵,C1,C2,D1,D2为系统适维加权矩阵[4]。目前对于怎样选取系统的加权矩阵还没有完全成型的理论,主要是由研究应用者根据模型的结构进行选择,但一般主要是对角线元素对控制器影响较明显;同时C1,D1的选取对H2的性能影响比较明显,C2,D2的选取对H∞性能影响较大,加权阵的最优选取需多次尝试后选取。
对于如上式(9)所示的系统,可以表示为如图1的控制系统,其中K(s)表示系统控制对象,反馈系数为K(s)的控制器可以使得此闭环控制系统是渐进稳定的,而且从ω到z∞的闭环传递函数T∞(s)的H∞范数不超过给定上界γ0,用以确保此闭环控制系统对由ω进入系统的不确定性具有鲁棒性,且使得ω到Z2的闭环传递函数T2(s)的H2范数尽可能的小,使H2范数度量的系统性能能处于一个较好且稳定的水平,该控制器即为混合H2/H∞控制器。
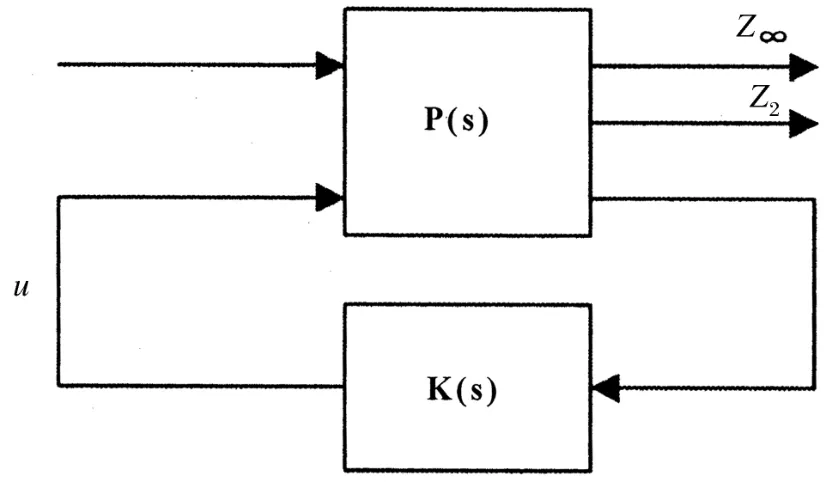
图1 混合H2/H∞控制系统
考虑上式(9),系统若存在X∈Rn×n,(X非奇异),L∈Rq×n,Y∈Rm×m,满足如下线性矩阵不等式(LMIs)
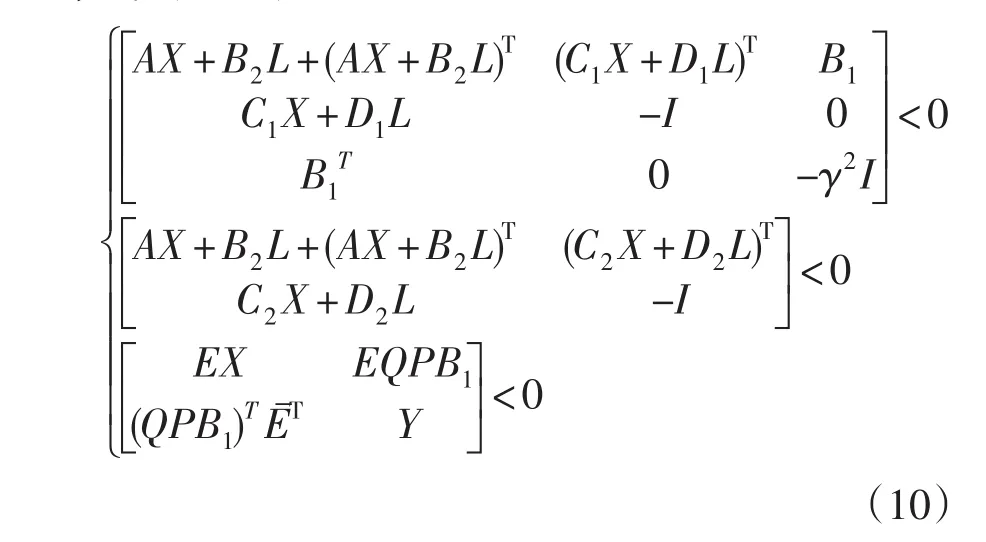
使(E,A+B2LX-1,B1,C2+D2LX-1)矩阵是严格真的且Trace(Y)为最小,则控制系统存在H2/H∞状态反馈控制器K(s);如果式(9)的最优解为(X∗,Y∗,L∗),则相应的混合H2/H∞控制器K为: K=L∗(X∗)-1
其中,非奇异矩阵P、Q为使(E,A+B2LX-1)具有如下分解形式的非奇异矩阵
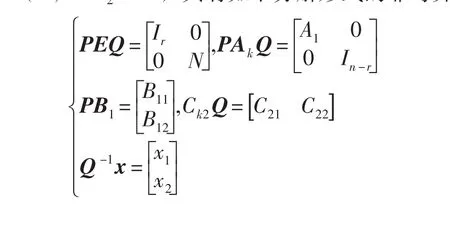
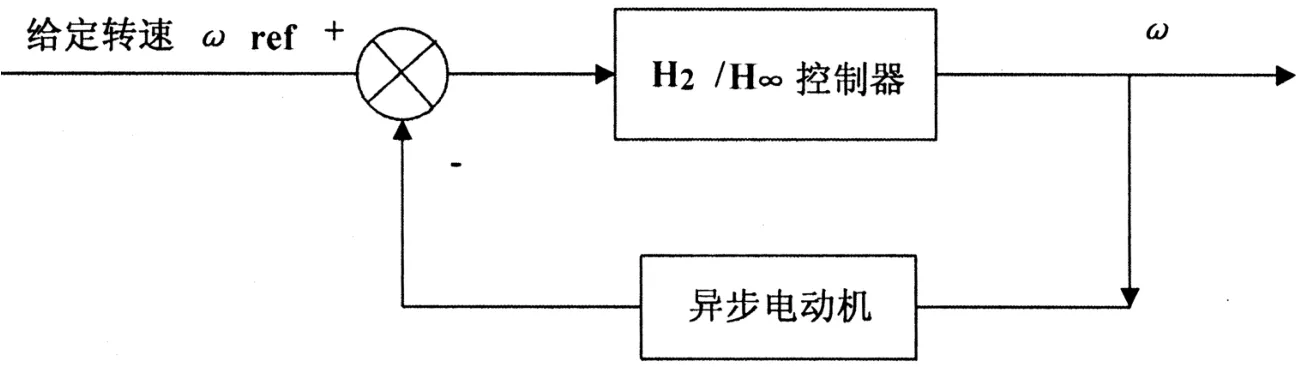
图2 混合H2/H∞控制控制策略结构图
其中,A1∈Rr×r,N∈R(n-r)×(n-r)是指数为h的幂零阵,且Nh-1≠0,Nh=0。
Matlab软件的LMI工具箱给求解混合H2/H∞控制器提供了msfsyn.m函数。对于被控对象式(8),可以得出系统混合H2/H∞控制器为

3 仿真验证
本文利用Matlab/Simulink软件搭建异步电动机的控制系统模型,对采用混合H2/H∞控制器的异步电机负载扰动和转子电阻变化电路模型进行仿真实验,并对结果进行分析和比较。
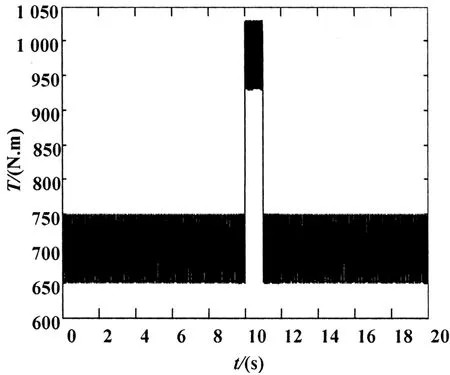
图3 异步电机负载变化
矢量控制异步电动机的参数如下:额定电压为380 V,额定功率为110 kW,额定频率为50 Hz,定子电阻和电感分别为0.035 2Ω和0.159 mH,转子电阻和电感分别0.033 5Ω和0.43 mH,互感为37.4 mH,转动惯量为2.98kg·m2,摩擦系数为0.1N·m·s,额定负载转矩TLN=730 N·m,极对数为2。
为了模拟异步电动机受负载干扰的情况,在仿真模型中设置负载转矩作扰动变化,比较在此种情况下异步电动机的转速变化情况。
图2是仿真模型的结构框图,将所设计的控制器应用于控制器中。
给定转速为120 rad/s,电机负载为730 N·m,变化情况如图3所示,比较给定转速和反馈转速之间的转速差,得到图4的变化曲线,从曲线可以看出,基于混合H2/H∞控制器具有较好的抗干扰能力,能保持系统的稳定性和同步性。
上述结果表明:系统在受负载扰动的情况下,异步电动机能够以较快的速度收敛,并且能稳定运行,具有较好的动态性能和鲁棒性。充分证明了混合H2/H∞控制控制策略的有效性。
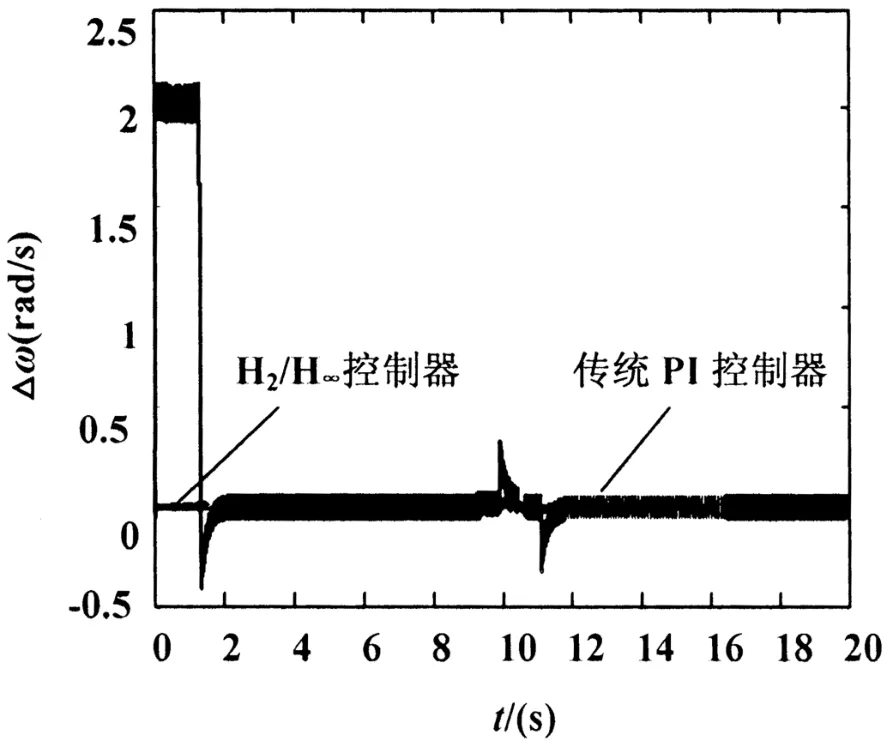
图4 转速变化情况
4 结论
本文在对异步电动机扰动控制进行了研究,通过对异步电动机线性化解耦,将H2与H∞控制技术结合,提出了一种基于H2/H∞控制器对异步电动机扰动控制的方法,并借助Matlab的LMI工具箱及Simulink仿真平台对异步电动机进行仿真控制。通过对负载扰动变化情况进行仿真比较,结果表明本文提出混合H2/H∞控制器具有很好的抗干扰性能,能以较快的速度响应系统的扰动,增强了控制系统的鲁棒性。
[1]吴其华,许邦荃.多电机同步传动控制系统分析[J].兵工自动化,2003(01):20-24.
[2] Riccardo Marino,Sergei Peresada and Paolo Valigi. Adaptive Input-Output Linearizing Control of Induction Motors[J].IEEE Transactions.Automatic Control,Vol.38,No.2,February 1993;DOI:10.1109/9.250510.
[3]孙东升.基于线性化反馈的异步电动机自适应解耦控制[J].电机与控制应用,2006,33(3):7-10.
[4]魏志达,黄曼磊,宋克明.混合H_2/H_∞励磁控制器在船舶同步发电机组并联中的应用[J].船电技术,2008,28(1):30-34.
[5]宋克明,黄曼磊,魏志达.船舶电站柴油发电机组H2/H∞综合控制器的研究[J].船电技术,2007,27(6):325-328.
[6]王进华.混合H2/H∞鲁棒控制器设计[J].控制理论与应用,2004,21(1):45-53.
[7]丁刚,王勋先,韩曾晋.感应电机的H_∞抗干扰控制[J].控制理论与应用,1998,16(4):483-486.
[8]杨志红,马广富,李传江.基于扩展LMI的多目标H2/H∞状态反馈控制综合[J].电机与控制学报,2004,8(4):333-337.
[9]罗亚琴.盾构机刀盘系统的同步驱动研究[D].大连:大连理工大学,2012.
Disturbance Research of H2/H∞Mixed Controller on the Asynchronous Motor
LUO Ya-qin,FU Zheng-zheng,YAO Jun-tian,YANG-Yi
(China Sinogy Electric Engineering Co.,Ltd,Shanghai200061,China)
The asynchronous motor control is studied in this paper.Because of uncertainty,the model of the asynchronous motor is linearized first,and then the mixed H2/H∞controller is used in the asynchronous motor speed adjusting system,and the performance requirements of the induction motor speed adjusting system transforms into the design problem of the mixed H2/H∞controller.The design method based on the H2/H∞controller is applied in the induction motor control system,and ensure the system robust stability,dynamic stability of the closed loop system,and ensure the stability of the induction motor's speed under load disturbance and other factors.
the H2/H∞controller;motor driving;linearization;disturbance Control
TP273
A
1009-9492(2014)09-0110-04
10.3969/j.issn.1009-9492.2014.09.030
罗亚琴,女,1986年生,江西人,硕士,助理工程师。研究领域:电机驱动控制。已发表论文2篇。 (编辑:向飞)
2014-03-12
