一种快速优化高清红外缺陷图的方法
2014-02-08上海太阳能工程技术研究中心有限公司肖颖婕祁永庆
上海太阳能工程技术研究中心有限公司 肖颖婕 祁永庆
一种快速优化高清红外缺陷图的方法
上海太阳能工程技术研究中心有限公司 肖颖婕 祁永庆
太阳电池组件在生产过程中需要对组件中的电池片进行红外缺陷检测,挑选出有重大缺陷的不合格组件,以保证组件的生产质量。利用高分辨率面阵扫描相机采集组件的红外缺陷图像,并通过对现有图像的对比度拉伸算法的改进,更快速地获得关于组件的高清红外缺陷图像。该方法相比于现有的一些组件红外缺陷检测设备,速度更快,图像更清晰,大大提高了组件的生产效率。
太阳电池组件红外检测图像处理
0引言
近年来,太阳能作为一种清洁能源得到了飞速发展,作为太阳能发电的主要载体,硅太阳电池组件的产量迅速增长。太阳电池组件的生产需要相当多的工序,而检测是其中必不可少的一道工序。随着全球光伏产业的快速发展,对组件检测速度提出了更高的要求。目前,绝大多数的组件生产厂家采用的组件红外缺陷检测设备的检测速度约为9秒~10秒,检测时间较长,而且图像分辨率越高的设备,检测速度越慢,使得高质量图像与高速检测形成了一个矛盾,组件的生产速度也将受到一定影响。因此,需要寻求一个在获得高清图像的同时,又能保证检测速度的方法。本文便是在这种情况下提出了一种快速优化高清红外缺陷图的方法,令检测速度大大加快,且图像对比明显,缺陷清晰可见。
1红外缺陷检测原理
1.1检测原理
利用半导体的电致发光原理[1]来实现对硅太阳电池片的缺陷检测。在给太阳电池注入正向电流的条件下,太阳电池发射出特征光谱的光,利用特定的感光元件,可记录太阳电池方阵中存在的黑片、碎片、断栅和裂纹等缺陷[2]。
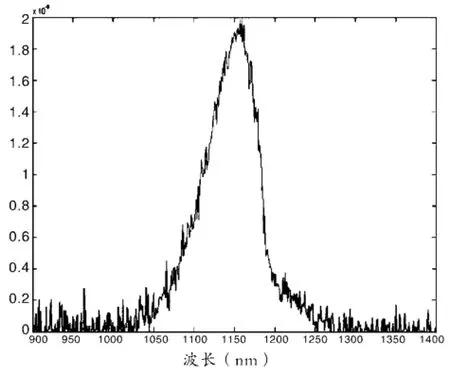
图1硅太阳电池量子跃迁光谱图
由图1可以看出,量子跃迁发出的光大部分分布在1150nm(纳米)附近,也就是近红外光,故可用红外摄像机来捕获其特征。因为缺陷存在处的发光强度有异于正常表面,检测时可根据不同的电池类型设置电源控制模块,给电池供电;使用红外装置检测出电池或组件表面的发光强度,最终获得组件内部结构的红外图像。
1.2硬件构成
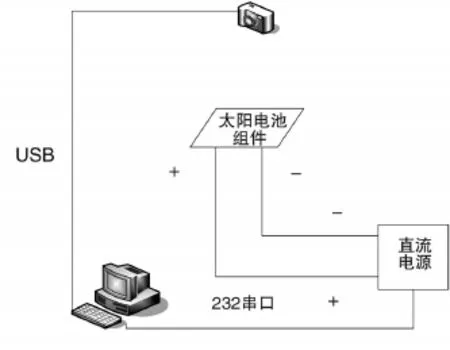
图2红外缺陷检测的硬件结构
系统硬件如图2所示。系统由红外相机、计算机、直流电源、太阳电池组件组成。根据半导体的电致发光机理,当对太阳电池组件施加直流电源时,组件会产生近似红外波长的光,红外相机捕获组件图像,通过USB(通用串行总线)接口或以太网口将图像送入计算机进行图像处理,最后检测出太阳电池组件的缺陷,同时计算机还用来控制相机的曝光时间以及直流电源的大小。
2快速优化高清红外缺陷图的方法
要获得高清的红外缺陷图像,除了更换高分辨率的相机之外,还可以对图像进行适当的处理。因为获得的原始图像本身可能存在过亮或过暗的情形,并且由于电池片的激发光强度并不是很强,所以得到的图像可能出现对比度过低,缺陷不清晰等情况,此时就需要对图像进行处理,使得缺陷与良好区域有明显差别[3]。因此对原始图像进行对比度等处理是很有必要的,并且处理的速度对于整个检测速度而言也是非常重要的。
在检测中,我们首先采集太阳电池组件红外缺陷的原始图像,并对原始图像进行预处理,包括去噪、滤波等,然后根据图像画出相应的直方图[4]。在得到图像的直方图后,仔细分析直方图的特征与图像的特征,根据直方图给出图像拉伸的参考范围。除此之外,需要寻找一个合适的对比度拉伸函数,本文中使用的是幂函数作为拉伸的基本函数[5],如图3所示,为幂函数的各种可用映射。

图3幂函数的各种可用映射
从图3可知,图3(a)和图3(c)的映射分别适用于图像偏暗和图像偏亮的情况。由于图像的亮暗除了与曝光时间有关之外,也受到相机增益的影响,增益越大,图像越亮,但是图像的噪声也会增多;反之,增益越小,图像越暗,但是图像的噪声也会减少,而原始图像的好坏直接影响到图像处理的结果。因此,在曝光时间已定的情况下需要采集噪声较少的、增益适当的图像作为原始图像。
图4所示,即为太阳电池组件红外缺陷的原始图像,经过去噪、滤波等预处理后画出其直方图,如图5所示。分析直方图可以发现,直方图中的两个波峰分别对应图像背景以及电池片区域,因此可以尝试以这两个波峰的峰值作为图像拉伸的参考范围,假设前一个波峰的值为low,后一个波峰的值为high,则原始图像的灰度拉伸范围为(low,high)。假设图像处理后的灰度范围为(buttom,top),于是建立一个幂函数:

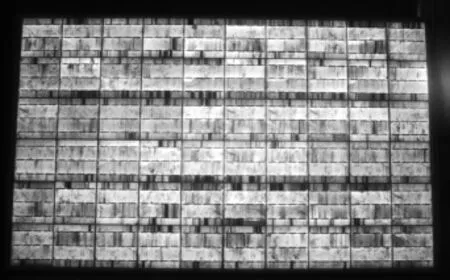
图4太阳电池组件红外缺陷原始图像
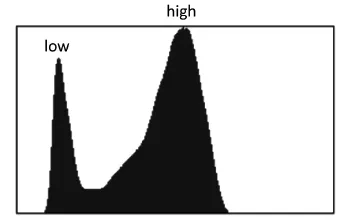
图5经预处理后的原始图像直方图
式中,X、Y分别为原始图像拉伸前后某一个像素点的灰度值,α为指数,由于最适当的原始图像本身略偏暗,根据幂函数的各种映射可知指数的范围在0<α<1较为合适。图6所示,为不同α值时的拉伸效果,可以看到,当α=0.8时的图像效果最好,α=0.7时图像仍嫌偏暗,而α=0.9时图像又稍嫌过亮了。
由此可见,当时本文所述的对比度拉伸函数效果最好。当然,图像处理的速度除了算法是一个关键之外,编程所用的方法也是非常重要的。
一般来说,图像编程所用的方法有三种:一是像素法,即对采集的图像逐点读取每个像素的灰度值,进行拉伸运算后再重新赋值;二是内存法,即将采集的图像转换为数组形式,通过内存进行拉伸运算后再重新转为图像;三是指针法,即将采集的图像通过指针方式直接对图像数据进行处理。这三种方法中,针对同样的运算处理,指针法的速度最快,对于分辨率越高的图像,该优势也越明显。因此,本文的图像处理编程使用的是指针法,以尽量节省图像处理过程的运算时间。
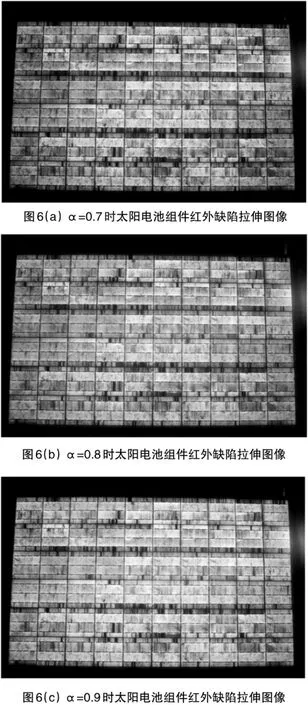
图6通过对比度函数拉伸后的太阳电池组件红外缺陷图像
3总结
综上所述,快速优化高清红外缺陷图像的方法,可以利用直流电源及相机构成视觉成像系统,获得关于组件表面的具有较大分辨率的原始图像,通过图像的直方图分析图像特征,并采用幂函数作为对比度拉伸函数对原始图像进行图像处理,令原本亮度不佳、对比度不够清晰的原始图像呈现出亮暗分明、缺陷明显的图像。整个过程,千万像素的分辨率,包括图像采集的时间在内,只需7-8秒,比现在的方法提速约2秒左右,在获得高清图像的同时,又保证了检测速度。对于太阳电池组件生产商而言,清晰的图像能够提高检测的准确性,而每块组件节约2秒的检测速度,将会大大提高企业的生产效率。
[1]刘恩科,朱秉升,罗晋生.半导体物理学[M].北京国防工业出版社,2006,273-278
[2]丁叶飞,李红波,张滢清,薛永胜,刘小宇,陈鸣波.硅太阳电池组件工艺缺陷的红外检测技术.太阳能技术与产品,2010(2)
[3]Fu Zhuang,Zhao Yanzheng,Liu Yang,et al.Solar Cell Crack Inspection by Image Processing [R].2004 International Conference on the Business of Electronic Product Reliablility and Liability:77-80
[4]何东健.数字图像处理(第二版).西安电子科技大学出版社,2009.07(10)
[5]Rafael C.Gonzalez,R ichard E.W oods,Stevev L.Eddins.冈萨雷斯数字图像处理(MATLAB版).电子工业出版社,2007.10(5)
A Fast Optim ized Method for High-Resolution Infrared Defect Image
Xiao ying jie,Qi yong qing
Assemb ly solar cells in so lar modules require infrared defect inspection in the p roduc tion p rocess to pick out the failed modules which has significant deficiencies,in order to ensure the quality of modules.Using high-resolution area scan cam era to cap ture in frared component defec t im age and by imp roving the contrast stretching algorithm of the existing image,we could obtain the high-reso lution infrared defect image of module much more quickly and c learer.This method has faster speed,obtains c learer im ages,and greatly imp roves the efficiency of modules p roduction compared to some o f the existing in frared de fec t detec tion equipm ent o f m odu le.
So lar m odu le,In frared detec tion,Im age p rocessing
项目】
1)上海市科委科研计划项目,课题编号:12dz1201300,项目名称:光伏并网发电系统检测及低反射高效率光伏组件关键技术研究与示范。
2)863计划项目,课题编号:2011AA050503,项目名称:MW级柔性薄膜硅太阳电池产业化关键技术研究。
肖颖婕,硕士,软件工程师,主要研究方向为软件编写与数字图像处理。祁永庆,博士,高级工程师,主要研究方向为太阳能装备与控制工程。
