车载激光扫描测量系统外标定方法的研究和实现
2014-02-08汪帆何文峰林昀
汪帆,何文峰,林昀
(宁波市测绘设计研究院,浙江宁波 315042)
1 引言
移动测量系统(Mobile Mapping System,MMS)是20世纪90年代兴起的一种快速、高效、无地面控制的测绘技术,自20世纪90年代以来,尤其是进入21世纪后,移动测量技术发展的如火如荼,众多的移动测量系统被集成出来。对移动测量系统进行外标定是获取高精度点云至关重要的一步[1]。
车载激光扫描仪的外标定主要有3个关键步骤:①建立标定控制场,获取标定控制点在WGS84坐标系下的坐标;②对标定控制场进行激光扫描,获取标定控制点在扫描仪坐标系下的坐标;③进行坐标转换,解算外标定参数[2]。在车载激光扫描仪的外标定中,如何获得标定控制点在激光扫描仪坐标系下的坐标,一直是车载激光扫描仪外标定的重点和难点。
2 车载激光雷达标定原理
激光扫描仪的外标定的主要工作在于寻找“同名点”以及求定同名点所在坐标系统之间的转换参数,即首先寻找同一地物点在大地坐标系中的坐标以及在激光扫描仪坐标系下的坐标,然后采用合适的坐标转换模型得到两个坐标系的转换参数,地物点在大地坐标系中的坐标可通过传统测量方法如全站仪、GPS等方式获得,地物点在扫描仪坐标系中的坐标需在激光扫描仪的原始扫描数据中提取,其难点在标定控制点在激光扫描仪坐标系下坐标的提取。
综上所述,车载激光扫描仪的标定可分为3个部分:
(1)建立标定场,选定标定控制点并测量各标定控制点的WGS84坐标;
(2)使用车载激光扫描系统对标定控制场进行扫描,获取激光扫描数据以及POS数据,对数据进行后处理,获得标定场中标定控制点在激光扫描仪坐标系下的坐标。
(3)选定坐标转换参数求解模型,使用标定控制点在激光扫描仪坐标系以及WGS84坐标系两个坐标系下的坐标,解算激光扫描仪坐标系到惯导坐标系的转换参数。
2.1 建立标定场
选择建筑规模适宜、GPS信号良好且较为空旷的区域为描仪外标定标定控制场,对建筑物进行拍摄,作为内业选定标定控制点的可视依据。选择天气晴朗、GPS信号良好、且标定场人流量少的时间获取标定场点云数据。
2.2 测定标定控制点
根据选定标定控制点时拍摄的相片和扫描获取的点云数据,选择明显特征碎部点,并在点云中获取标定控制点在扫描仪坐标下的坐标。在标定场布设足够的一级导线点,利用高精度全站仪(如TM30)获取标定控制点的WGS84坐标。
2.3 标定参数求解
假设在KL时刻,激光扫描仪测量得到激光点XL,对于激光扫描仪坐标系下任一点XL,其对应地面点的WGS-84坐标为:

由于激光扫描仪与惯导坐标系的相对关系是固定的,而且惯导坐标系与GPS天线之间的相对关系可以通过传统测量方式测量得到,XOW、RWL为:

式中,XINS为激光扫描仪扫描XL点瞬间惯导坐标系原点在WGS-84坐标系中的坐标向量,aINSL为激光扫描仪坐标系原点在惯导坐标系中的平移向量,RINSL是由于激光扫描仪坐标系与惯导坐标系之间存在欧拉角而需要的由激光扫描仪坐标系转换到惯导坐标系所需要的转换矩阵,是由惯导坐标系到WGS-84坐标系之间的转换参数,可由POS系统得到。车载系统中地物点的直接地位方程为:


其中,(h,p,r)是GPS/INS联合解算的地理坐标系下车体的航偏角、俯仰角以及翻滚角。
车载激光扫描系统的激光扫描仪外标定的任务就是解算出aINSL以及RINSL。
3 车载激光雷达标定实施方案
3.1 实验系统简介
本实验所使用的移动激光扫描系统为武汉大学测绘学院为宁波市测绘设计研究院研发的高精度移动激光扫描测量系统。该移动激光扫描测量系统的具体情况如表1所示,在本实验中标定激光扫描仪RIEGL VZ-400。
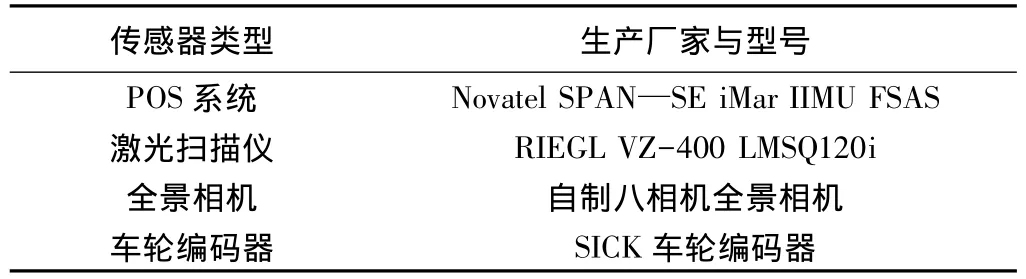
实验用测量车搭载传感器 表1
3.2 标定场建立方案
车载激光扫描仪的扫描距离一般为 30 m~160 m,扫描角度为 80°~180°,对于如此长的扫描距离以及如此大的扫描角度,其对应的标定场也必定是一个大型的标定场,人工建立一个如此大型的标定场是不切实际的,因此在建立标定场时,可充分利用现有的建筑物等,以建筑物的房屋角点以及窗户角点作为标定控制点,如图1所示。

图1 标定控制场标定控制点示意图
标定控制场的建立需遵行以下原则:
(1)标定控制场应当建立在房屋有规则房屋角点、窗户角点的区域,保证在点云中能够高精度的提取标定控制点;
(2)保证控制点有一定的高程层次分布;
(3)选在空旷、GPS信号良好的区域,以保证POS数据的精度;
(4)房屋高度不宜过高,3~4层楼高为宜,以保证激光扫描仪能够扫描到顶层房屋角点。
标定控制点WGS84坐标的测量通过传统方式进行,在存在两个互相通视控制点的情况下,可同过全站仪直接测量出各标定控制点的WGS84坐标;在没有两个互相通视的控制点的情况下,需首先采用静态GPS测量方式获得至少两个高精度控制点,然后通过全站仪测量方式获得各标定控制点的大地坐标。建立完成的标定场如图2所示。

图2 标定场示意图
3.3 标定控制点扫描仪坐标系下坐标获取
获得标定控制点在扫描仪坐标系下坐标的具体过程如下[3]:
(1)从原始的线扫描数据中解码得到各地物点在扫描仪坐标系下的三维坐标、扫描时的激光反射强度以及扫描时刻的时间。
(2)获得初始转换参数,初始转换参数的坐标原点偏移量通过全站仪测量得到,坐标轴旋转角度使用机械加工中扫描仪的安装角度,以保证标定的精度以及效率。
(3)使用初始转换参数,将扫描仪坐标系下的点云转换到大地坐标中,同时建立转换后坐标与转换前坐标的一一对应的关系,由于转换参数的不准确,生成的激光点云地物可能存在变形。
(4)可视化使用近似参数得到的车载激光点云,在可视化界面中中通过肉眼以及鼠标拾取的方式选中标定控制点,由于大地坐标与原始坐标存在一一对应的关系,可由此找到标定控制点在扫描仪坐标系下的坐标。
(5)通过标定控制点的大地坐标以及扫描仪坐标完成转换参数的求定。获得标定控制点在激光扫描仪坐标系下的坐标的流程图如图3[4]所示:
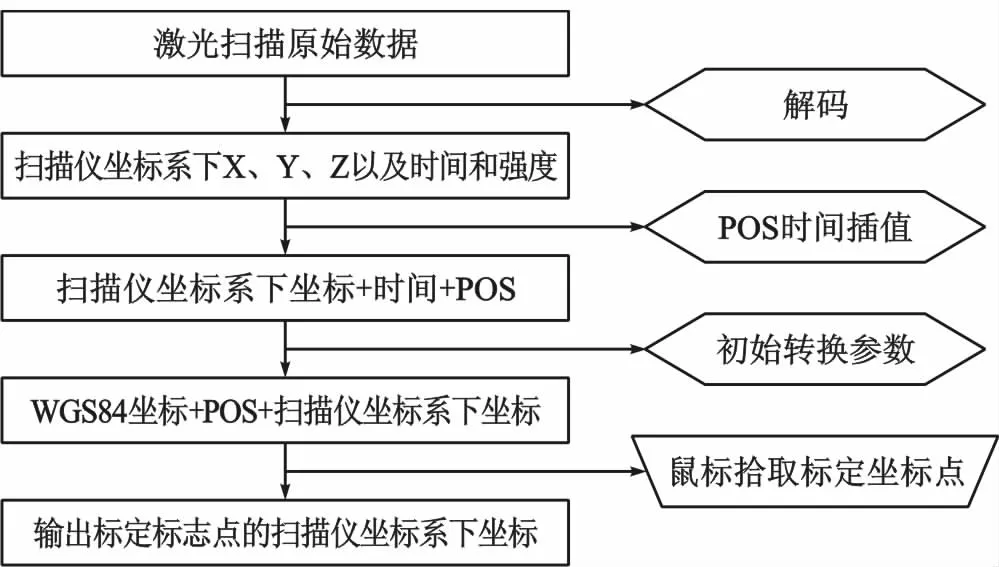
图3 获取标定标志点扫描仪坐标系下坐标方法
3.4 标定参数解算方案
理论上说,获得三个地物点在大地坐标系以及激光扫描仪坐标系中的坐标,即可得到转换参数,一般来说,为了提高解算的精度,会获得较多“同名”地物点通过最小二乘方式得到标定参数,并用一定的“同名”点检验标定结果的外符合精度[5]。
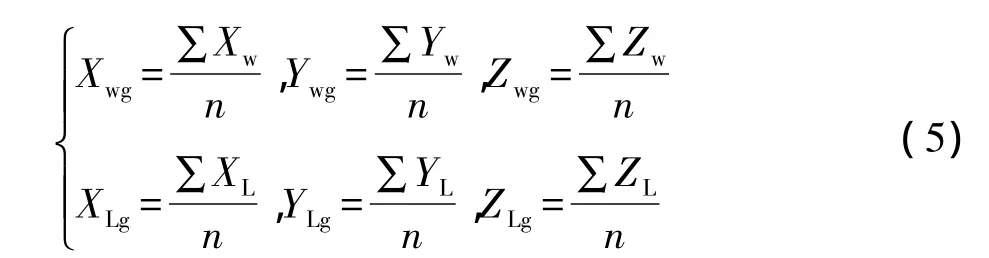
设有n对标定控制点,其WGS84坐标和扫描仪坐标系下的坐标分别为XW和XL,为了计算方便,采用重心化坐标,两个坐标系下的相应的重心点坐标分别为:
将标定点的WGS84坐标和点云坐标作重心化处理得:
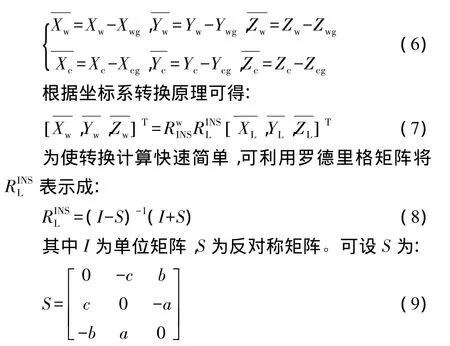
a、b、c为罗德里格参数。将式(8)、式(9)代入式(7)中得:


对于n标定控制点,误差方程式为:解算出罗德里格参数后,即可求出每个拍摄位置的然后将每个拍摄位置上的WGS84坐标系和扫描仪坐标系下的重心点的坐标代入式(4),可列出偏移向量的误差方程:根据最小二乘原理,可求得偏移向量aINSL:


解算出aINSL以及RINSL后,通过一定的标定检核点检验标定的精度,标定精度满足要求则车载激光扫描仪的外标定完成。
4 实验结果与分析
移动激光扫描系统对标定控制场扫描完成后,首先进行POS数据的后处理,得到高精度的测量车扫描过程中的绝对位置与姿态,供激光扫描数据的后处理使用。POS数据后处理使用WayPoint公司的POS数据后处理软件 Inertial Explorer,POS数据处理包括GNSS差分处理、GNSS与惯导数据耦合已经平滑等步骤。解算完的POS数据如图4所示。
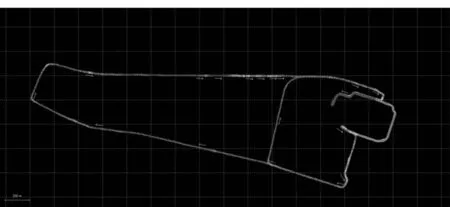
图4 使用Inertial Explorer解算POS数据
对激光数据的后处理,首先要从原始的扫描数据中解码出激光扫描仪坐标系下的点的坐标及其对应的高精度扫描时间,解码过程如图5所示,对扫描仪坐标系下的每个点,将激光扫描仪扫描该点时的POS数据作为点的属性加到扫描仪坐标系下的点数据中,继而使用近似转换参数将扫描仪坐标系下的激光点与POS数据融合,得到大地坐标系下的激光点云,此时的大地坐标系下的激光点云包含一系列的属性,包括激光扫描仪扫描该点时的POS数据、对应的扫描仪坐标系下的点等,使用近似转换参数得到的激光点云如图6所示,从图中能够明显的分辨房屋角点以及窗户角点。
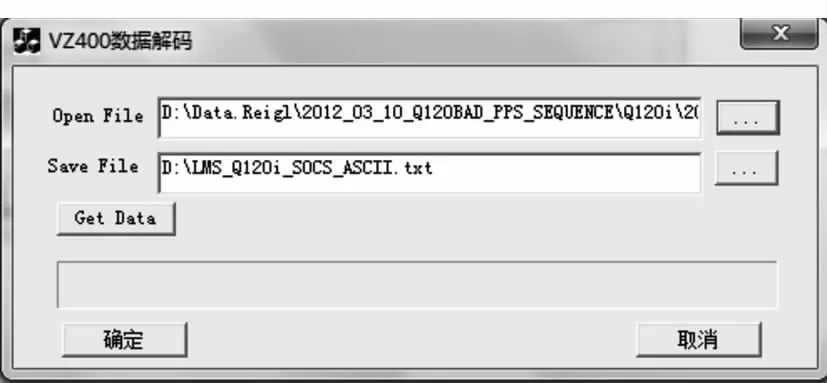
图5 VZ-400数据解码
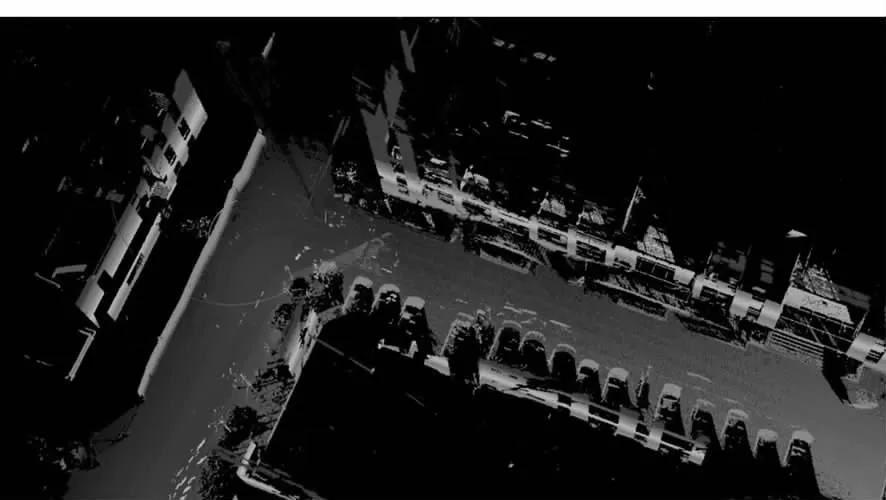
图6 使用近似转换参数得到的激光点云
一系列的准备工作已经完成,接下来的关键步骤是人工鼠标拾取标定控制点,软件自动输出该控制点的扫描仪坐标系下的标定点坐标以及激光扫描仪扫描该点瞬间的POS数据,选点过程如图7所示。
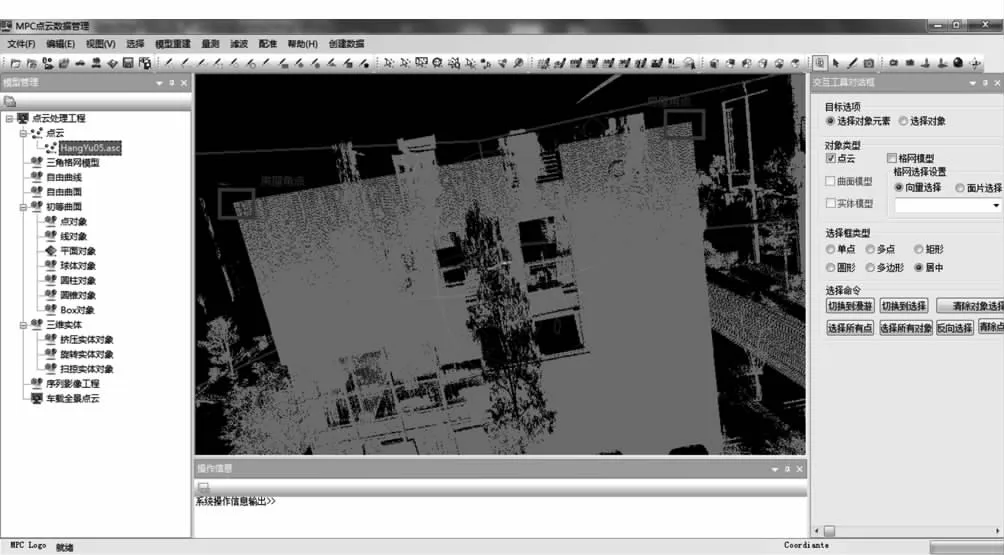
图7 在点云中选取标定控制点
用于标定的包含初始转换参数、扫描标定控制点时刻POS数据、标定控制点扫描仪坐标系下激光点、标定控制点WGS84坐标的数据如图8所示。

图8 用于解算标定参数数据
最后,使用获得的标定控制点在扫描仪坐标系下的坐标以及WGS84坐标系下的坐标,利用3.3中的标定参数解算模型,编写程序解算标定参数,最终解算的标定参数如表 2所示,标定内符合精度0.116 328 cm。

标定参数解算结果 表2
标定参数解算完成后,使用标定得到的外参数重新解算激光数据,得到标定后的大地坐标系下激光点云,使用标定检核点检验标定精度,此次实验中,使用了5个检核点,检核误差如表3所示。
上述标定控制点的误差是指标定后的激光点云的坐标与用全站仪测量得到的标定控制点的坐标之间的距离值,代表整个移动激光扫描系统的精度水平,此误差包含有GPS定位误差、惯性测量单元测量误差、激光外标定误差以及POS数据内插存在的误差等。
从实验结果可知,标定的效果并不理想,造成标定后系统的绝对误差偏大的原因包括GPS定位精度的限制以及惯性测量单元的精度限制,这些因素无法轻易消除,单从激光扫描仪的外标定方面来看,文中进行的标定实验存在以下不足:

标定精度检核结果 表3
(1)标定控制点位的精度不够高;
(2)实验中使用的控制点数量以及检核点的数量不足;
(3)鼠标拾取控制点不准确;
(4)尽管激光扫描数据的点密度非常的大,甚至可以达到 1 cm×1 cm的密度,但是依然很难保证在激光点云中能够找到标定控制点所对应的激光点。
(5)实验中的误差模型没有将GPS定位误差、惯性测量单元误差以及外标定误差分离,亦没有分析他们对移动激光扫描系统整体精度的影响。
上述不足中,标定控制场测量精度不高可以通过建立精度更高的标定场来解决,使用测距以及测角精度更高的仪器测量标定控制点的坐标;鼠标拾取不准可以通过更仔细的拾取控制点来解决,点云过稀可以增大激光扫描的密度,减慢标定过程中移动测量车的速度来达到更高的点云密度;GPS定位误差以及惯导测量误差需要建立误差模型来分析,由于GPS定位误差以及惯性测量单元的误差不易分析,此不足需要进一步的研究。
5 结语
移动测量系统的应用越来越广泛,已经由研究、实验阶段走向生产应用阶段,对移动测量系统的精度要求也越来越高,本文正是在高精度移动激光测量系统的需求的驱动下,对移动激光扫描系统的标定进行了研究。快速简洁地获得车载三维激光扫描系统的外标定参数对车载三维激光在实践中的运用有很重要的意义。
[1]李德仁,胡庆武,郭晟等.移动道路测量系统及其在科技奥运中的应用[J].科学通报,2009.
[2]张卡,盛业华,叶春等.车载三维数据采集系统的绝对标定及精度分析[J].武汉大学信息学报·科学信息版,2008.
[3]P.Rieger N.Studnicka M.Pfennigbauer.Boresight alignment method for mobile laser scanning systems[EB/OL].http://www.geomatik- hanmburg.de/tls/tls2009/images/15_tls2009_rieger.pdf.
[4]陈为民.基于全景成像与激光扫描的城市快速三维测量与重建技术研究[D].武汉:武汉大学,2012.
[5]陈允芳,叶泽田等.车在三维数据采集系统的绝对定向及精库分析[J].武汉大学学报·信息科学版,2008.
