三维激光扫描在建筑规划竣工测绘中的应用研究
2014-02-08史秀保汪帆葛纪坤
史秀保,汪帆,葛纪坤
(宁波市测绘设计研究院,浙江宁波 315042)
1 引言
三维激光扫描技术具有高效率、高精度、非接触主动测量等独特优势,有效避免了传统作业方式外业劳动强度大、时间长、重复测量、工作效率低等弊端[1]。目前该技术运用到建筑规划竣工测绘中主要存在以下难点:①外业作业时仪器的配备和组装困难,不方便操作;②缺少相应软件利用点云数据制作二维平面图[2]。
2 建筑规划竣工测量技术指标
2.1 测量精度要求
平面精度:根据宁波市建筑规划竣工测绘相关标准规范要求,按地物特征点数学精度要求将地物分为一类、二类和三类,各精度级别的中误差及说明如表1所示:
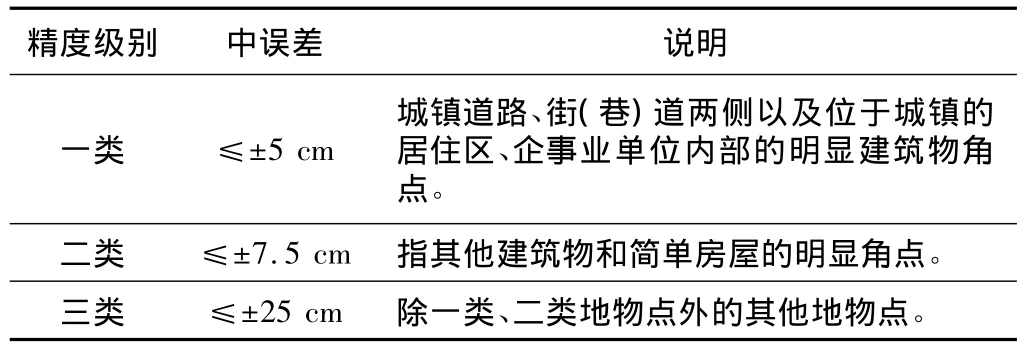
地物类别及精度 表1
高程精度:房屋高度的精度不低于 5 cm,地表高程注记点中误差不大于±15 cm。
2.2 测绘成果
宁波市建筑规划竣工成果包括以下内容:
(1)1∶500竣工地形图;
(2)竣工测量规划复核图;
(3)竣工测绘总平面图;
(4)1∶500套红线地形图;
(5)三维模型数据;
(6)竣工测量报告。
本文只针对利用三维激光扫描技术采用静态扫描方法制作建筑竣工测绘中有关二维图件的过程、方法进行研究和试验。
3 关键技术研究
3.1 仪器及软件
项目组使用的激光扫描仪为高精度激光扫描仪RIEGL VZ-400。激光扫描仪的扫描距离一般为 30 m~160 m,扫描范围为100°×360°(垂直×水平)。
点云处理软件为武汉大学测绘学院与宁波市测绘设计研究院联合研发的海量级城市三维激光点云信息综合处理平台VR_CityScene。该软件采用基于内容的点云自适应简化算法,建立了点云多分辨率数据结构和基于外存的点云存取机制,并结合GPU硬件加速技术实现海量点云的实时渲染和高效的索引机构,设计开发了点云管理和搜索引擎;解决了海量点云的自适应抽稀、高精度自动配准、三维精细建模等关键难题,建立基于点云模型的测图要素智能化提取和三维空间量测,并实现了与我国常用测图软件的无缝集成。
3.2 作业流程设计
根据三维激光扫描技术的特点和宁波市建筑规划竣工测量的要求,制定作业流程如图1所示[3]:
3.3 三维激光扫描方案
根据测区的地形特点和已有控制点分布情况,选取合适的扫描方案。扫描方案根据内业点云配准方法不同可分为以下3种:
(1)坐标系扫描法。扫描仪与靶标均架设在已知控制点上,内业利用已知数据进行点云绝对定位定向[5]。

图1 作业流程
(2)碎部控制扫描法。扫描仪无须架设在已知控制点上,外业通过常规测量方法获取点云中一定数量的明显特征点三维坐标,内业利用各站之间同名碎部控制点进行配准和定向。
(3)靶标配准法。扫描仪无须架设在已知控制点上,外业通过相邻两站之间设置的4个或以上靶标确定相邻两站之间相对位置关系,同时通过常规测量方法获取少量碎部控制点,内业通过同名靶标球进行相邻站点云的配准,最后通过碎部控制点完成整体点云的绝对定向。
根据测区内卫星信号的强弱,测区附近已有控制点情况及测区范围大小,制定出外业作业时间最短、点云数据最全面及内业操作最简单的作业方案。
3.4 扫描仪器配备及组装
三维激光扫描外业扫描仪器及设备包括:三维激光扫描仪、发电机、数码相机、笔记本电脑、靶标球及三角对中杆、三脚架、数据通信线和电线等。为方便外业仪器的架设和转站,项目组采用自主设计和生产的推车进行组装和外业作业,外业推车如图2所示。

图2 外业推车
3.5 数据处理及成果制作
(1)初步点云数据处理
利用RIEGL VZ-400自带的商业软件RiscanPro对点云数据进行配准后,为满足二维成图的要求,需要对点云数据进行合并、抽稀处理[4]。合并、抽稀软件为武汉大学测绘学院与宁波市测绘设计研究院联合研发的Save MM SPCData,如图3所示。
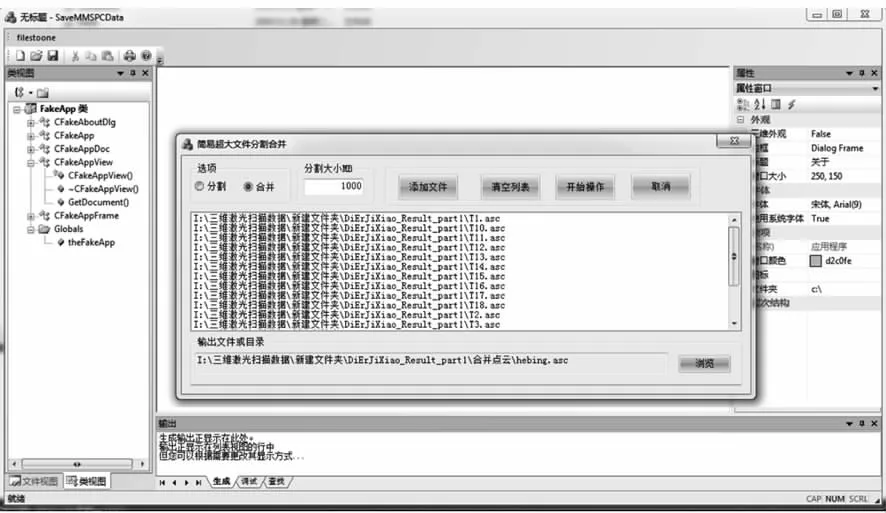
图3 点云抽稀
(2)二维成图方法
利用VR_CityScene软件可以在点云数据上直接描绘出建筑和地形的轮廓线并实时或手工导入CAD软件中。针对不同形状、特性的成图对象可以采用以下成图方法:
①点云顶视图上直接描绘,此方法适用于对于外轮廓规则的建筑,有取点和描线两种方法,如图4~图6所示。

图4 顶视图描线法(绿色线条为所描线段)
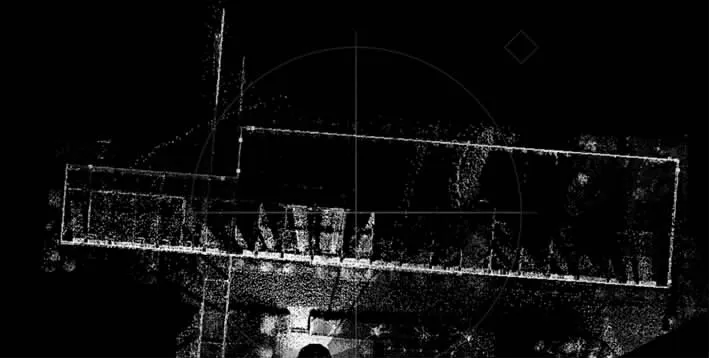
图5 顶视图取点法(绿色点为所取点位)

图6 导入CAD
②切片绘制:此方法适用于对于建筑物层次复杂的建筑.对于建筑物层次比较复杂的建筑,无法直接在顶视图中判定建筑物各层次轮廓线,因此可利用切片的方法截取建筑特定层次获取该建筑特定层次的横截面,然后描绘出该层次的轮廓线,如图7所示。
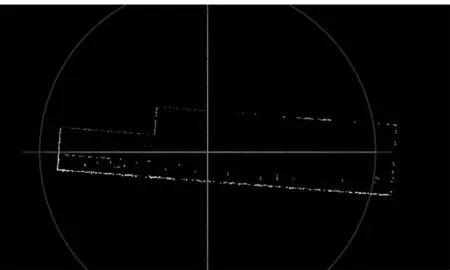
图7 切片效果截图
③地形绘制方法。对于点云过稀无法判断道路边线、摄像头和路灯无法判断的情况,可根据其高程特性选择狭窄的高程空间对其进行高程伪彩色渲染,从而使绘制对象更容易判读,如图8、图9所示。

图8 默认颜色下路灯的判读情况
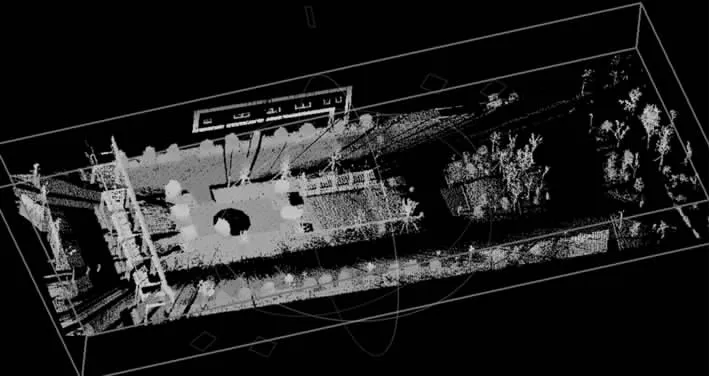
图9 高程伪彩色下路灯的判读情况
(3)成果资料制作
根据所绘制二维测区地形图,结合建筑规划许可证附图及有关规划审批材料,制作竣工测量规划复核图、竣工测绘总平面图、1∶500套红线地形图等。
4 生产试验
4.1 项目概况
本次试验选择宁波市银润豪园项目作为生产试验对象。该项目位于宁波市海曙区通途路以北、丽园北路以西。总占地面积约 62 000 m2,如图10所示。

图10 测区地块整体空间布局
4.2 项目实施
本次项目采用坐标系扫描法进行现场点云数据获取。测区共布置6个图根控制点,图根点及室内地坪高程利用采用图根水准方法施测。利用VR_CityScene软件在所获取的点云数据中绘制测绘二维平面图,在此基础上结合建筑规划许可证附图及有关规划审批材料,制作竣工测量规划复核图、竣工测绘总平面图、1∶500套红线地形图等。
4.3 成果精度检测
经浙江省测绘质量监督检验站检验后,本次试验精度统计如表2、表3所示:

地物点平面误差分布状况统计表 表2
以上检测数据说明,利用三维激光扫描技术技术完全可以运用于建筑竣工测量,精度符合浙江省宁波市有关建筑竣工测绘规定。通过工作量统计发现,利用三维激光扫描技术比常规方法减少了35%的外业工作量,且降低了外业工作强度,实现了将部分外业工作转化为内业工作的目的[6,7]。
4.4 误差分析
三维激光扫描所获取点云主要有以下3个精度影响因素:图根控制点精度、三维激光的入射角以及测量距离。由于图根控制点的布设方法和精度与常规作业方法相同,故本文仅对三维激光的入射角以及测量距离对成果精度的影响作以下分析,如表4、表5所示:

入射角对精度影响统计表 表4

测量距离对精度影响统计表 表5
以上研究分析表明,精度较差的点云主要分布于与三维激光扫描仪架站点角度较大且距离较远的区域,而与三维激光扫描仪架站点角度较小且距离较近的区域精度较高。因此,为保证获取高精度点云,应在图根控制点选布时考虑测量对象与控制点的角度与距离因素。
5 结语
三维激光扫描技术的应用越来越广泛,已经由研究、实验阶段走向生产应用阶段,对三维激光扫描技术的运用需求也越来越高。本文正是在高效率、高精度的建筑竣工测绘的需求的驱动下,对三维激光扫描技术在建筑竣工测量中的运用进行了研究,并在研发出了一系列生产软件的前提下提出了一套切实可行的操作方案和流程,取得了满意的应用研究成果[8]。
但是,静态三维激光扫描技术在实际测量过程中仍存在搬站困难、需要提前布置控制点等问题。我们将在现有成果技术基础上,利用车载三维激光扫描技术解决建筑规划竣工测量中二、三类地物测量精度问题进行持续研究。车载三维激光扫描技术测量快捷,无需提前布置控制点,可更大幅降低外业作业时间和劳动强度,提高效率,对于三维激光扫描技术的运用和推广和尽快实现“办公室测绘”有着积极重要的意义。
[1]李德仁,胡庆武,郭晟等.移动道路测量系统及其在科技奥运中的应用[J].科学通报,2009:4~5.
[2]梅文胜,周燕芳,周俊.基于地面三维激光扫描的精细地形测绘[J].测绘通报,2010:19~20.
[3]陈为民.基于全景成像与激光扫描的城市快速三维测量与重建技术研究[D].武汉:武汉大学,2012:7~8.
[4]臧克.基于Riegl三维激光扫描仪扫描数据的初步研究[J].首都师范大学学报.自然科学版,2007:6~7.
[5]张宏,胡明.三维激光扫描仪在地形测量中的应用[J].企业技术开发,2007:11~12.
[6]王星杰.三维激光扫描仪在道路竣工测量中的应用[J].北京测绘,2012(4):21~25.
[7]徐进军,余明辉,郑炎兵.地面三维激光扫描仪应用综述[J].工程勘察,2008(12):31~33.
[8] 李杰.建筑物竣工测量数据处理及质量控制[J].测绘通报,2004(7):26~28.
