机器人系列标准介绍
——服务机器人模块化设计总则及国际标准研究进展
2014-02-05王田苗雷静桃魏洪兴杨书评
王田苗 雷静桃 魏洪兴 杨书评
(1 北京航空航天大学,北京,100091;2 上海大学,上海,200072;3 北京机械工业自动化所,北京,100120)
机器人系列标准介绍
——服务机器人模块化设计总则及国际标准研究进展
王田苗1雷静桃2魏洪兴1杨书评3
(1 北京航空航天大学,北京,100091;2 上海大学,上海,200072;3 北京机械工业自动化所,北京,100120)
本文介绍服务机器人模块化标准的研究背景和模块化设计的标准体系,详述服务机器人模块化设计总则及国际标准研究进展,探讨以标准先行原则推进服务机器人产业发展思路。
服务机器人,模块化,标准体系
0 引言
服务机器人不同于工业机器人,工业机器人工作于工业环境,结构形式单一,构型基本固定,多进行重复性操作任务;而服务机器人多工作于非结构化环境,种类繁多,形态各异,其结构构型和功能具有多样化特征,如家用服务机器人,其移动方式可以是腿式也可以是轮式;特种服务机器人更是形态各异。
2007年比尔·盖茨预言,未来服务机器人将像个人计算机一样走进千家万户,彻底改变人类的生活方式[1]。当前,服务机器人市场前景广阔,且不同的家庭对其功能需求也各异,但是却价格高昂,如何实现机器人结构和功能多样化,又降低价格,推进服务机器人产业快速形成?国内机器人学界专家借鉴计算机产业成功发展模式,提出服务机器人模块化和标准化设计思想,通过服务机器人模块化设计,从服务机器人模块化体系结构、操作系统等软件的顶层设计角度,通过关键技术研发,开展机器人创新设计方法研究,并以标准先行推动服务机器人模块化研发、制造与集成,从而推动服务机器人产业化,并希望类似计算机集成模式,机器人可根据用户需求快速集成。
1 服务机器人定义和分类
1.1 服务机器人定义
国际上对服务机器人尚没有统一的定义,仅是将它从其他装备特别是工业机器人中排除出来。UNECE和国际机器人联合会(International Federation of Robotics,IFR)的定义是:服务机器人是一种半自主或全自主工作的机器人,它能完成有益于人类的服务工作,但不包括从事生产的设备。
1.2 服务机器人的分类
根据IFR报告[2],服务机器人按用途被分为两大类:专用服务机器人和个人/家用服务机器人,一些典型的服务机器人举例如下。
1)专用服务机器人。
特殊用途机器人:管道机器人、深海探测机器人、微型机器人、室内保安机器人、室外巡逻机器人、汽车/飞机清洗机器人、消防救援机器人、井下救灾机器人、纳米机器人、管路探勘机器人、公共场所服务机器人、餐厅服务机器人、军用机器人、核工业现场作业机器人等;
农业机器人:除草机器人、施肥机器人、伐木机器人、果/蔬采摘机器人等;
医疗机器人:外科手术辅助机器人、康复训练机器人、镭射治疗机器人等。
2)个人/家用服务机器人 。
家用机器人:吸尘机器人、除草机器人、清洁机器人、助老助残机器人等;
休闲娱乐机器人:玩具机器人、教育培训机器人、娱乐机器人等。
2 服务机器人模块化标准体系
服务机器人模块化设计,是通过一系列标准体现模块化概念,这一系列标准构成了服务机器人模块化标准体系,涵盖服务机器人的模块划分、机械接口、软件接口、通信协议和仿真调试等。
1)服务机器人模块化设计总则
规定服务机器人模块化设计相关术语、设计总体原则、机器人模块化体系结构、机器人模块化标准体系和模块化机器人总体设计流程,用于指导服务机器人模块化设计。
2)机器人机构类功能构件接口标准。
规定机器人机构类功能组件分类、划分、特征参数及机构类功能构件接口等,用于指导机器人模块化机构类功能组件的研究、设计与制造,或用于机器人仿真开发环境中机构类功能组件三维建模设计与仿真分析。
3)机器人电气类功能组件接口标准。
规定机器人功能组件的电气与数据接口标准,便于实现机器人各功能组件间的电气与数据通信。机器人电气类功能组件接口标准是为保证机器人内部各模块化功能组件间基于数字信号的数据交换过程的稳定、可靠、数据解析而共同遵守的、统一的电气规范和通信协议规范,包括机器人控制器模块、计算扩展模块、数据采集扩展模块、传感器集成模块、执行器驱动集成模块、人-机/机器人-机器人接口交互模块等基于数字信号的数据交换过程。
4)机器人通信总线协议。
标准规定了模块化机器人系统中一种通信总线的数据格式和程序规范,适用于模块化机器人系统中不同功能模块构件之间的数据交换和信息共享。
5)机器人软件功能组件接口标准。
规定采用模块化和网络化构建的任何机器人产品的软件资源的功能封装技术,定义了适用于机器人开发的组件模型和相应的接口规范,并统一各机器人功能组件间的通信协议,支持各种机器人系统以机器人功能组件形式集成。开发人员可以结合来自多个供应商的机器人功能组件到一个单一的应用程序中,使它们能够在创建更灵活的设计时更迅速。
6)实时机器人操作系统接口标准。
规定机器人操作系统为机器人中间件、设备驱动和应用程序提供统一的编程接口,包括应用程序接口、便利函数库、外部操作接口,为机器人应用软件开发与部署提供便利,以提高基于机器人软件功能组件建立的机器人应用程序的可移植性。
7)机器人仿真开发环境接口标准。
规定机器人仿真开发环境中提供的功能接口,包括模型构造接口、算法开发接口、半实物仿真接口、人机交互接口,为机器人的功能组构件以及应用程序的开发与部署提供便利,以提高模块化机器人开发效率。
3 服务机器人模块化设计总则
3.1 制订目的
机器人采用模块化设计,便于机器人功能组件在不同机器人系统中可重用,避免重复性开发工作,降低机器人开发难度,提高机器人开发效率,便于机器人的快速集成与系统维护。设计总则规定了服务机器人模块化设计相关术语、机器人模块化设计基本原则、机器人模块化体系结构、机器人模块化设计标准体系、机器人模块化设计流程等。
服务机器人模块化设计总则体现机器人模块化设计基本思想,即从实现不同功能的角度,设计具有标准接口、能完成一定功能的、可互换和重用的功能组件,这些功能组件可由不同的专业供应商提供,机器人系统可由这些功能组件组装而成,其目的是降低机器人开发难度,提高研发效率,降低制造成本。
服务机器人模块化设计总则用于指导服务机器人研发、制造和集成,使之采用模块化设计的基本原则、标准体系和设计流程等,主要目的是通过标准先行的原则,规范服务机器人研发、制造,以推进我国服务机器人的产业化。
3.2 主要术语
1)服务机器人(service robots,SR)。
除工业自动化应用外,能为人类或设备完成有用任务的机器人[3]。
2)机器人模块化(robot modularity,RM)。
机器人模块化是把机器人系统,按照软件和硬件分离、功能分离、结构分离等原则划分成若干相对独立的基本组成部分,并按照通用化、标准化等原则设计成可组合、可重用、可更换的相对独立的模块化单元。
3)机器人功能组件(robotic functional component, RFC)。
是实现机器人模块化的要素,具有独立的结构,符合标准的软件和硬件接口规范,能完成机器人相关的独立功能,能够实现支撑、运动、感知、计算、控制等特定功能。用于实现机器人的快速集成。机器人功能组件包括机构类功能构件、软件类功能组件和电气类功能组件。
4)机构类功能构件(mechanism functional component, MFC)。
是组成模块化机器人的机械类硬件要素,能完成一定功能的机械模块,具有标准的机械接口,能实现快速连接。
5)电气类功能组件(electrical functional component, EFC)。
是组成模块化机器人的电气类硬件要素,能完成一定功能的电气硬件模块,具有标准通信接口。
6)软件类功能组件(software functional component, SFC)。
是组成模块化机器人的软件要素,能完成一定功能的软件模块,具有标准的软件接口。
7)机器人操作系统 (robot operation system, RobOS )。
用于管理机器人系统内各种硬件和软件资源,合理有效地组织机器人系统工作,提供一个使用方便可扩展的工作环境。
3.3 体系结构
1)机器人模块化总体设计模型
机器人模块化设计总体模型为层状结构,如图1所示。自上而下划分机器人模块化设计,主要是针对机器人功能组件(RFC),应遵循结构分离原则(软件硬件分离原则)和功能分离原则(通用专用分离原则)等。机器人功能组件(RFC)根据其特性又划分为不同粒度的、具有标准接口的机构类功能构件(MFC)、电气类功能组件(EFC)和软件类功能组件(SFC)。
自下而上为机器人集成模型。根据用户对机器人功能需求,选择或设计机构类功能构件、电气类和软件类功能组件,在机器人操作系统的统一管理下,进行机器人系统的快速集成。

图1 服务机器人模块化设计总体模型
2)服务机器人模块化体系结构。
服务机器人体系结构反映一个服务机器人系统各组成要素间的相互关系和功能分配,确定一个服务机器人系统的信息流通关系和逻辑结构。
服务机器人模块化体系结构描述模块化机器人的组成要素和基本工作原理,描述模块化硬件组成和模块化软件层级。服务机器人模块化体系结构如图2所示。
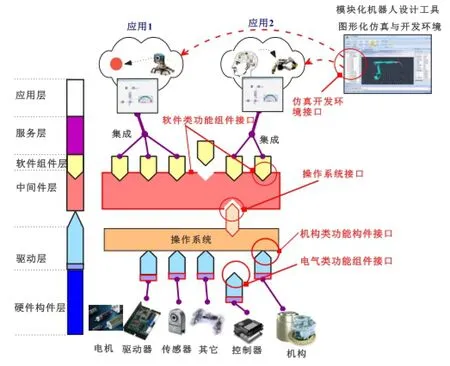
图2 服务机器人模块化分层体系结构
机器人模块化体系结构为分层结构模型,自上而下分别为:
应用层:通过协调组织各应用软件功能构件,实现满足用户需求的机器人感知、行动、思维、人机交互等基本功能;
服务层:用于给应用层提供一些基本的功能服务,如构件管理服务、错误处理服务、电源管理服务等;
软件组件层:构成模块化机器人系统的基本软件要素,它们通过对特定功能的抽象在上层被实例化;
中间件层:包含一个能够持续监视功能构件动态过程的中间件核心和相应的命名服务,建立自下而上的抽象,屏蔽设备层的异构性;
驱动层:主要提供操作系统支持下的硬件设备驱动程序、设备协议程序和设备服务程序等;
硬件构件/组件层:包括机构类功能构件和电气类功能组件等底层硬件,它们和软件功能组件具有一定的物理对应关系。
机器人模块化体系结构具有开放性、模块化、标准化特点。
开放性:采用标准接口总线,便于实现机构类、电气类组件的兼容和即插即用;通过通信总线实现不同类型总线接口模块化功能组件的互通互连。可通过增减功能组件,便于功能扩展。
模块化:机器人功能组件设计成为相对独立的、能完成一定功能的模块,遵循标准接口设计;硬件构件遵循模块化设计和系列化设计,使各构件具有可重用性,便于快速集成不同机器人系统。
标准化:机器人功能组件遵循相应的接口标准。其中,机构类功能构件(MFC)适应不同的应用需求,采用系列化结构设计,具有标准机械接口;电气类功能组件(EFC)遵循通信接口协议;软件类功能组件(SFC)符合接口标准,由专业机器人软件公司设计、测试并封装而成。
3.4 设计流程
1)确定机器人构型及功能组件划分。
根据用户对服务机器人的功能需求,分析设计机器人外部形态、合理划分机器人功能组件(或构件);确定根据用户功能需求的服务机器人构型,以及集成服务机器人所需的机构类功能构件、电气类功能组件和软件类功能组件。
2)选择所需的功能组件或研发专用功能组件。
从机器人功能组件库中选择所需的功能组件;若机器人组件库中无满足用户特定需求的功能组件,则设计开发相应的专用功能组件,所设计功能组件应符合相应的接口标准。
3)在机器人仿真开发环境中进行服务机器人的虚拟集成、仿真设计和验证。
在机器人图形化仿真开发环境下,首先利用机器人组件库中具有标准接口的各类功能组件,以及根据用户功能需求研发的具有标准接口的功能组件,建立各模块间的物理结构、内在拓扑结构、内在控制结构和数据交换路由,进行机器人系统的虚拟集成。然后,进行机器人运动学和动力学的仿真分析,优化机械结构和控制算法,获取服务机器人的优化设计参数数据。
4)服务机器人集成。
机器人集成商进行服务机器人的快速集成,包括硬件系统和软件系统集成和调试。根据用户对服务机器人作业任务和工作空间等的具体要求,完成机构功能构件和电气功能组件的遴选,安装机器人操作系统和相应的软件功能组件,集成为所需服务机器人系统。服务机器人模块化设计流程如图3所示。
4 服务机器人相关国际标准研究进展
机器人国际标准,目前以日本、美国等主导标准内容。服务机器人因有广阔的市场前景,日本、韩国等国家纷纷围绕服务机器人进行国际标准布局,特别在服务机器人安全性、性能等方面开展了相关国际标准研究工作,对服务机器人词汇标准进行了修订。我国工业机器人国家标准基本都采用国际标准,在服务机器人标准方面,应借鉴发达国家成功经验进行提前布局,跟踪国际标准进展,相关企业应关注国际标准,相关专家应积极参与国际标准制订,为我国机器人产品打入国际市场奠定基础。
国际标准化组织第184技术委员会第2分技术委员会ISO TC184/SC2 负责Robots and Robotic Devices(机器人及机器人装备)标准工作[4],2006年以前,主要围绕工业机器人相关标准开展工作,工作范围包括工业机器人定义、术语、性能规范及测试方法、安全、机械接口、编程方法等;自2006年开始,该委员会涉及服务机器人工作内容。
目前ISO TC184/SC2下设有6个工作组(Working Group),每个工作组成员由来自至少5个国家的专家组成。各工作组主要工作范围是:
WG1: Vocabulary and characteristics 词汇与特性;
WG3: Industrial safety 工业机器人安全;

图3 服务机器人模块化设计流程
WG7:Personal care safety 个人护理机器人安全;
WG8:Service robots 服务机器人;
JWG9:Safety for medical devices using robotic technology 采用机器人技术的医疗设备安全;
WG10:Modularity for service robots 服务机器人模块化工作。
其中,ISO TC184/SC2的WG8工作组,自2009年开始制订以智能轮椅为主要产品的服务机器人性能标准。
2012年,中国提出拟开展服务机器人模块化国际标准工作,首先在WG8工作组下进行提案推进工作,经过大量研讨与论证,最终来自5个国家专家达成共识,于2014年成立WG10工作组,开展机器人模块化国际标准提案及后续标准工作。
中国机器人技术专家通过机器人模块化国家标准工作开始涉足国际标准领域,将逐渐积累宝贵经验,为今后工作奠定良好基础。
5 结束语
服务机器人模块化及标准化有利于推进服务机器人产业化。一方面,采用机器人模块化技术可以实现机器人的快速集成,满足不同用户对服务机器人的功能多样化需求;另一方面,模块化技术可以大大降低机器人产品的价格,满足未来市场对服务机器人的巨大需求。
面对服务机器人广阔的市场前景,与服务机器人相关的基础标准应与时俱进,建立用于指导服务机器人模块化研发和生产的一系列标准;基于标准体系,由政府、研发机构、企业、供应商、集成商共同推进标准实施,为服务机器人产业发展打下坚实基础。
总之,服务机器人模块化技术和相关标准体系研究具有重要意义,是指导机器人研发和制造机构开展各项工作、促进服务机器人产业形成和发展的基础。
[1] Bill Gates.家家都有机器人.环球科学.2007(2):6-13
[2] World Robotics 2010 Service Robots.
[3] ISO 8373-2012.
[4] http://www.iso.org.
本文获得国家863计划机器人标准化/模块化关键技术及应用平台开发项目课题资助,项目编号:2012AA041401。
