磁 悬 浮 系 统 的 实 验 设 计
2014-02-03杨亚非王佳伟钱玉恒
杨亚非, 王佳伟, 钱玉恒
(哈尔滨工业大学 a.控制与仿真中心; b.飞行器控制实验教学中心,黑龙江 哈尔滨 150001)
0 引 言
为提高本科生和研究生的实践能力,在本科生课程设置上增设了实验创新课,研究生课程设置上增设了一门控制系统实践课程。通过课程提供的若干实验设备,学生自主选取实验内容,自主完成实验,只在必要时才有老师提供指导。实验设备的选取和实验内容设置是这些课程取得良好教学效果的关键,所以在飞行器控制实验教学中心(国家级实验教学示范中心)所拥有的固高公司的磁悬浮球实验装置、平面二级倒立摆、直升机姿态控制系统等实验装置的基础上,通过大量调研,并利用“985工程”、“211工程”建设经费选购了美国ECP公司的控制力矩陀螺、扭转振动装置、工业控制系统仿真器、磁悬浮系统等四套实验装置。这些新购置的实验装置都是非常典型的控制设备。世界上许多著名大学,例如美国的斯坦福大学、加州大学伯克利分校、西北大学、普渡大学;俄罗斯的莫斯科鲍曼国立技术大学;瑞典的皇家工学院;德国的斯图加特大学;法国的电力机械工程学院;日本的东京大学、韩国的首尔大学等都选用这些装置作为本科生和研究生的实验设备,用于控制算法的设计、演示与验证[1]。本文选取了4种设备中的磁悬浮系统进行实验设计,供学生们选用。磁悬浮技术[2-3]广泛应用于磁悬浮列车[4]、磁悬浮轴承[5-10]、磁悬浮飞轮[11]、磁悬浮电机[12]和磁悬浮实验系统[13-15]中。ECP公司生产的磁悬浮系统的功能十分完善,通过不同的配置方式,可以模拟SISO系统、SIMO系统和MIMO系统的特性。通过该系统的一系列实验,学生可以掌握非线性系统的基础控制方法,并为深入研究更先进的控制方法打下基础[16]。
1 系统概述
1.1 系统的结构组成
该实验系统由图1所示的3个子系统组成。第1个子系统是由驱动线圈、磁铁、导轨、支架和底座等组成的机械装置;第2个子系统是由基于数字信号处理器(DSP)的控制器/数据采集板卡和输入/输出电箱组成的控制系统;第3个子系统是一个在PC机Windows操作系统下运行的执行程序。
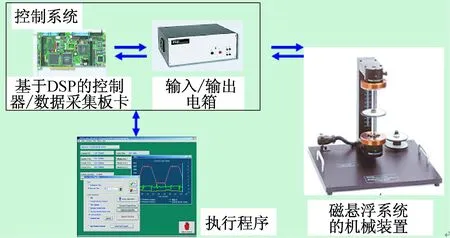
图1 磁悬浮系统组成图
(1) 机电装置。包括磁悬浮装置的执行器和传感器。该设计采用2个高场密度的稀土磁体和高通量驱动线圈,提供超过4 cm的控制磁悬浮范围。激光传感器提供非接触式位置反馈,并集成了专用的调节电子线路用来降噪和抑制环境光的干扰。转盘采用了高速自旋导电盘片与永久磁铁交互感应出电流使磁体悬浮。磁体位置控制是由盘片旋转速度变化完成的。
(2) DSP。基于M56000处理器系列的,能够以高采样率执行控制律。该控制器解释轨迹命令,并支持数据采集、轨迹生成、系统状态及安全检测等功能。1个逻辑门阵列实现编码器脉冲解码。2个可选的辅助数模转换器(DAC)进行实时模拟信号测量。这种控制器是实现现代工业控制的典型代表。
(3) 系统执行程序。系统的用户界面,它支持控制器指定、轨迹定义、数据采集、绘图系统执行指令等。通过易于生产简单或非常复杂算法的直观的“类C”语言来指定控制器。内置的自动编译器通过DSP进
行执行程序代码的有效传送和执行。该接口支持多种功能,提供一个友好强大的实验环境。执行程序的操作窗口如图2所示。
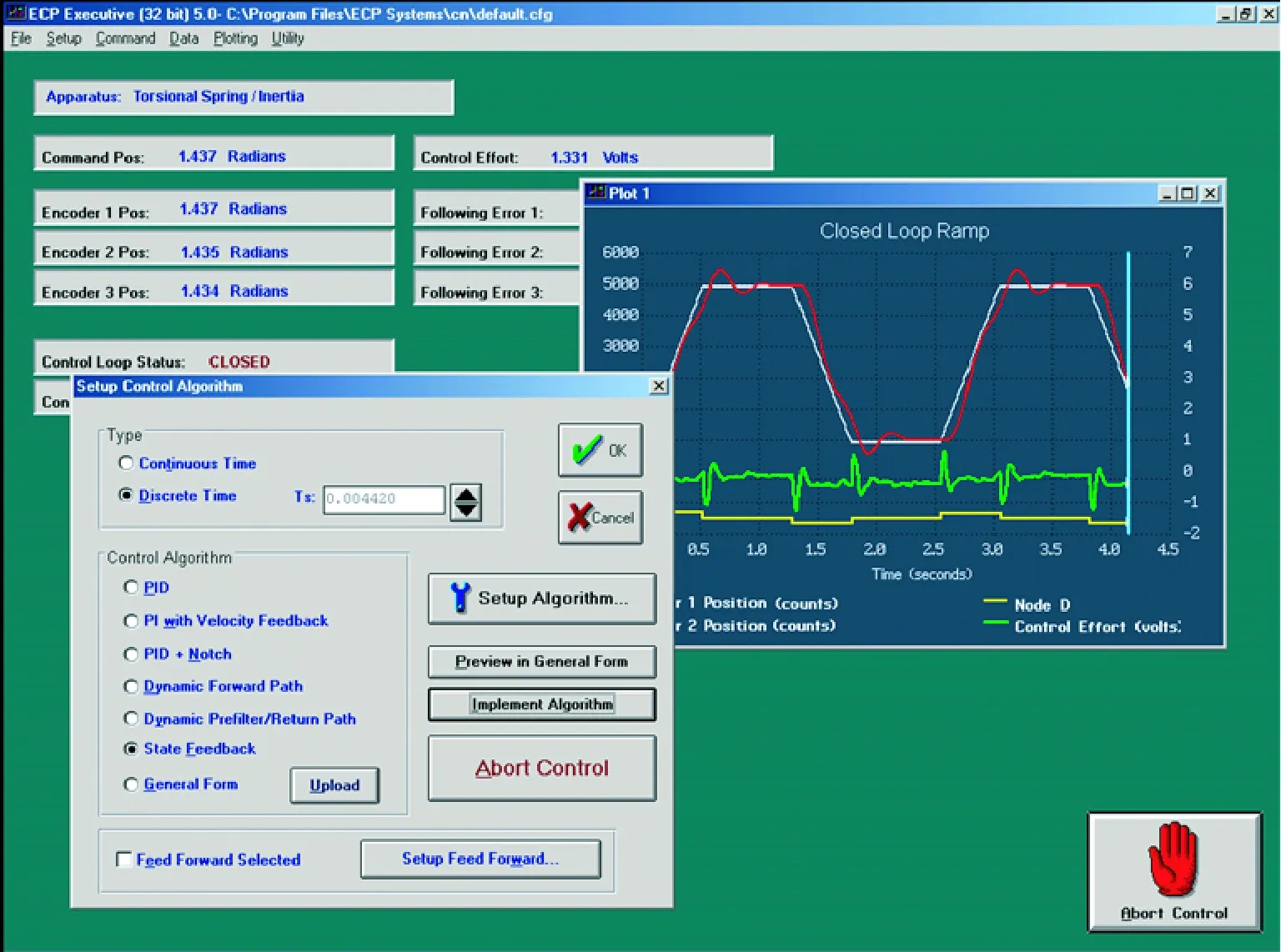
图2 执行程序操作窗口
1.2 系统的性能
实验装置的性能如表1所示。

表1 实验装置的性能
1.3 系统的功能
执行软件执行时在计算机屏幕上显示执行窗口(见图2),该窗口中包含主菜单、实时数据显示、系统状态和紧急中断控制按钮。主菜单中各项及其下拉菜单如表2所示。
用户通过指定执行程序中的控制算法,将其加载到基于DSP的实时控制板卡,该DSP在每个指定的采样周期执行此算法,读取参考输入和反馈传感器(光电编码器)的值,计算,将数字控制效果信号输出到DAC,DAC将数字流转换为一个模拟电压,然后通过一个伺服放大器转换为电流,通过电机变为转矩,电机根据设备动力学特性将电机的输入转变为所期望的输出。这些设备的输出都由编码器感知,输出是脉冲流。脉冲由DSP板上的计数器解码,作为一个数字位置字供实时控制算法使用。
当用户指定轨迹,然后命令系统执行机动。轨迹参数将被加载到控制器板卡上。DSP生成相应的参考输入值供实时控制算法使用。整个机动过程中,由用户指定的任何数据都被采集和存储在控制器板卡的内存中,一旦完成机动,数据就被下载到PC机内存,用于绘图和存储。

表2 主菜单及下拉菜单内容及功能
2 系统配置
2.1 系统的机械装置
磁悬浮系统的机械装置如图3所示。该装置由驱动线圈、导轨、磁铁、支架和底座等部分组成。

图3 磁悬浮系统的机械装置
2.2 系统运动学方程与动力学方程
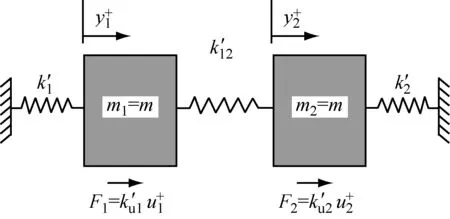
1个具有2个悬浮磁铁的磁悬浮系统框图如图4所示。磁铁受到其他驱动线圈力、其他磁铁磁力、重力和摩擦力(建模为粘滞摩擦)的作用。

图4 自由运动框图和动态配置
由图4,对于第1、2个磁铁,有
(1)
磁力被建模为
(2)
式中:
y12=yc+y2-y1
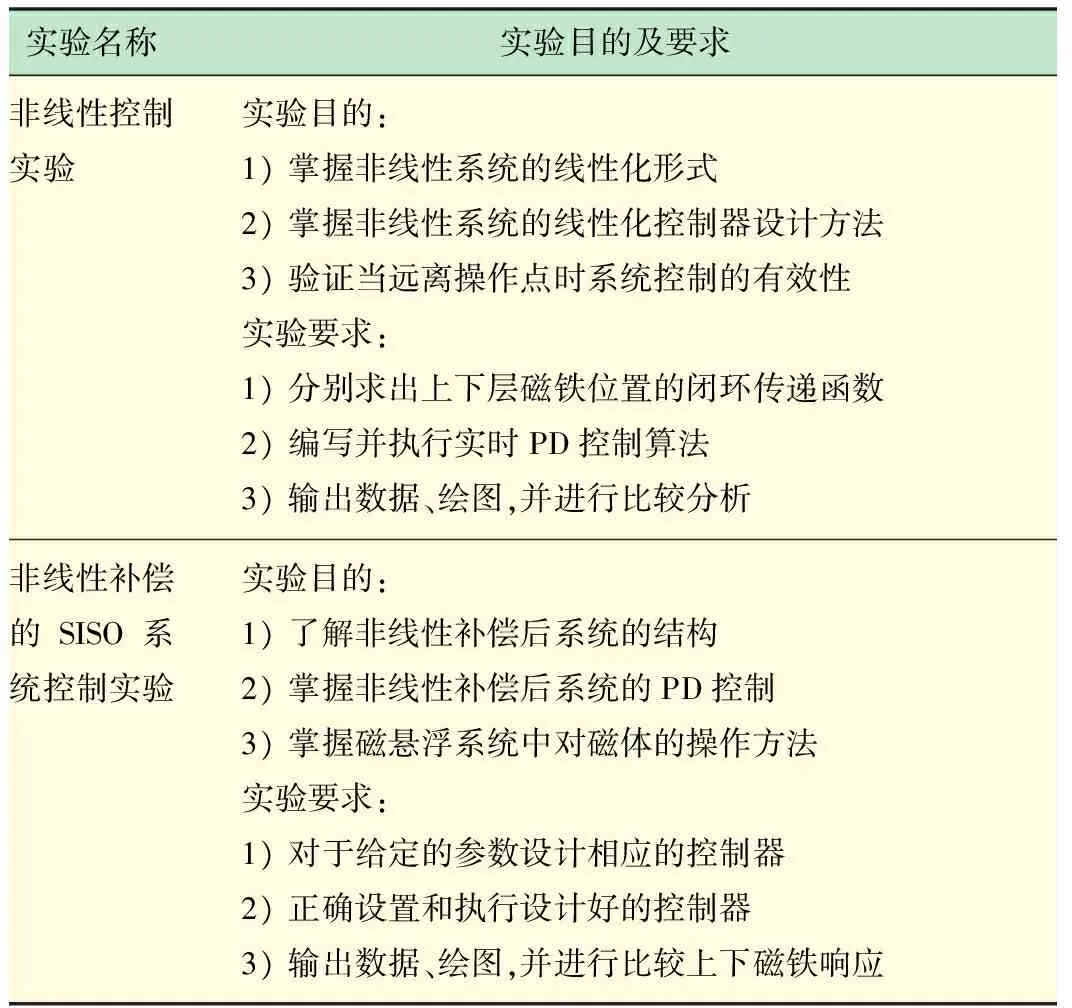
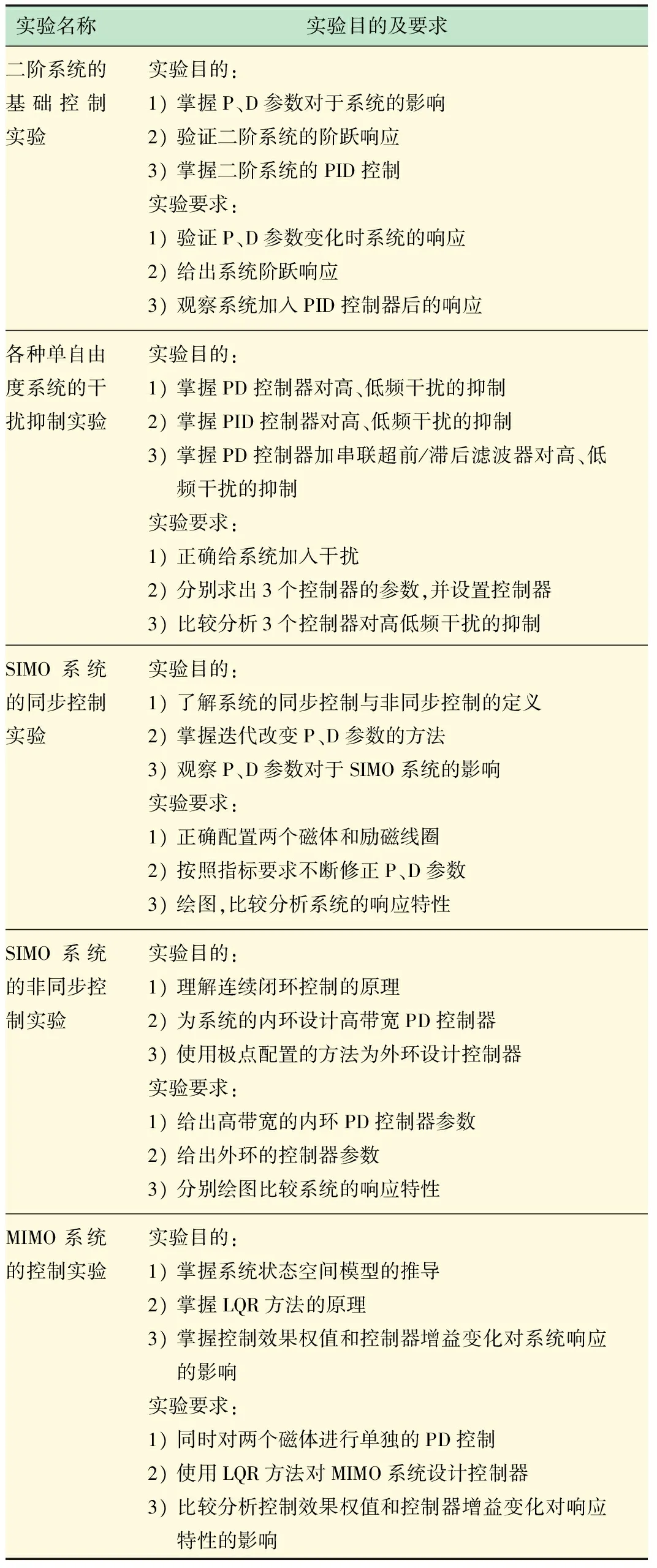
a,b,c,d和N是常数,这些常数由磁铁配置的数字建模决定,典型的3 对于线圈电流的典型数值和磁体正常操作范围,交叉的磁铁/执行器力Fu1、Fu21通常小于Fu11、Fu22。对于磁悬浮系统来说,摩擦力也是很小的。除此之外,方程(2)分母项产生一个力与距离的4阶近似关系。下面简化的模型对于许多分析和设计都是有效的: (3) 式中 线圈电流ii用控制增益ui代换。控制增益可以是数字的电流或电压,它与线圈电流成线性比例的关系。系数a必须与ui的尺度一致。上述的方程通过删除近似项可以被修改用于描述SISO和SIMO系统。 对于小的运动,系统建模为线性的。可以通过将运动方程在某个操作点进行泰勒级数展开,然后取其零阶和一阶项来构成线性方程。将方程(3)用α表示,则线性方程为 (4) 式中,y10,y20和u10是相应的磁体位置和控制效果在操作点。为了进行控制系统的设计,选择平衡点作为操作点,则有: {Fm12-Fu11+mg}|y10,y20,u10=0 (5) 计算式(4),得到: (6) 重写为 (7) 同理,对于方程(10): (8) 式中: 从方程(5),可求解平衡点的控制增益值: (9) (10) 图5 等价的简化线性对象 容易配置为SISO、MISO和SIMO系统,通过激励一个线圈或者移除一个弹簧。线性模型可由方程(7)和(8)忽略近似项后得到。系统的状态空间实现为 (11) 式中: Xi是输出或者0。 对于实际物理系统,只要能够简化为如表3所示的系统,本实验装置可以模拟。 为使学生对磁悬浮系统有综合了解,设计了7种实验(见表4)。各个实验项目的实验步骤大致如下:① 按图示配置方案设置好各框架;② 编制控制算法;③ 设置相应的参考输入;④ 执行控制算法;⑤ 绘制数据图形;⑥ 存储所得数据;⑦ 对所得结果进行分析和比较,改进算法。 表3 系统配置方案 通过以上由易到难的实验使高年级本科生和研究生分阶段地掌握磁悬浮系统。是对本科生创新课和研究生控制系统实践课程的教学内容的大胆尝试和创新,丰富了课程的实验内容,激发了学生的学习兴趣。 表4 实验项目设置 续表4 当然,本实验装置的控制方法不限于以上所列的几种,还可以使用自适应控制、模糊控制等方法,这可以作为本科生创新课题或研究生学位论文的一部分让学生们进一步研究。 本文对美国ECP公司的磁悬浮系统的系统组成、性能和所能实现的功能进行概要介绍,给出了系统线性化后的总的运动方程。给出可模拟实际物理系统的运动方程。设计了7种实验方案,给出了明确的实验目的和要求。所设计的实验丰富了本科生创新课和研究生控制系统实践课程的内容,使高年级本科生和研究生由易到难分阶段地掌握磁悬浮系统的机理和控制算法,同时使他们在实验过程中充分掌握实验装置的操作方法,加深对所学PID法、极点配置法、LQR法等典型控制方法的理解,为学生进一步学习控制方法打下基础。 [1] ECPsystems. ECP_MagLev_Model_730.pdf[DB/OL].http://www.ecpsystems.com/docs/ECP_MagLev_Model_730.pdf,2013-10-30. [2] 戴 政. 磁悬浮技术综述[J].电机与控制应用,2000,27(2): 24-26. DAI Zheng. The survey of maglev technologies [J]. Electric Machines & Control Application,2000,27(2): 24-26. [3] 毛保华,黄 荣,贾顺平. 磁悬浮技术在中国的应用前景分析[J]. 交通运输系统与信息,2008,8(1):29-39. MAO Bao-hua, HUANG Rong, JIA Shun-ping. Potentiality a nalysis on application of maglev technologies in China[J]. Journal of Transportation Systems Engineering and Informati on Technology,2008,8(1):29-39. [4] 史筱红,潘冬花. 磁悬浮列车的发展及现状[J]. 黑龙江科技信息,2011,23:28-28. SHI Xiao-hong, PAN Dong-hua. The development and status of maglev train[J]. Heilongjiang Science and Technology Information,2011,23:28-28. [5] 李慧敏,汪希萱. 磁悬浮轴承的研究现状和发展趋势[J]. 轴承,2003,6:50-52. LI Hui-min, WANG Xi-xuan. The status and trend of maglev bearing research[J]. Bearing,2003,6:50-52. [6] 汤双清,胡 欢. 磁悬浮轴承的应用现状与展望[J]. 机床与液压,2009,37(12):209-211. TANG Shuang-qing, HU Huan. The Current application and development trend for magnetic suspension bearing[J]. Machinetool and Hydraulics,2009,37(12):209-211. [7] 张 钢,刘汝卫,阴庆振 等. 工业应用型永磁悬浮轴承关键技术[J]. 机械工程师,2009,12:21-24. ZHANG Gang, LIU Ru-wei, YIN Qing-zhen,etal. The key technology for industrial application of permanent magnetic bearings[J]. Mechanical Engineer,2009,12:21-24. [8] 董建磊,周海军. 磁悬浮推力轴承的分析与研究[J]. 伺服控制,2011,5:43-45. DONG Jian-lei, ZHOU Hai-jun. The analysis and research of maglev propulsive force bearings[J]. Servo Control,2011,5:43-45. [9] 刘万涛. 主动磁悬浮轴承技术研究[D]. 沈阳:沈阳工业大学制造工程系,2012. [10] 吴晓锋,宋志江,张春艳. 磁悬浮轴承悬浮能力及控制系统分析研究[J]. 河北工程大学学报(自然科学版),2009,37(12):209-211. WU Xiao-feng, SONG Zhi-jiang, ZHANG Chun-yan. Analysis on the magnetic bearing suspension capacity and its control system[J]. Journal of Hebei University of Engineering(Natural Science Edition),2009,37(12):209-211. [11] 吴 刚,刘 昆,张育林. 磁悬浮飞轮技术及其应用研究[J]. 宇航学报,2005,26(3):385-390. WU gang, LIU Kun, ZHANG Yu-lin. Application and study of magnetic bearing flywheel technology. Journal of Astronautics,2005,26(3):385-390. [12] 谢宝昌,任永德,王庆文. 磁悬浮电机及其应用的发展趋势[J]. 微电机,1999,32(6):28-30. XIE Bao-chang, REN Yong-de, WANG Qing-wen. Developing trends of magnetically levitated electric machines and their applications[J]. Micromotors Servo Technique,1999,32(6):28-30. [13] 徐 力. 磁悬浮实验的理论浅析[J]. 天津理工学院学报,1997,13(4):82-85. XU Li. A Concise and Theoretic Analysis on The Test of Magnetic Floating[J]. Journal of Tianjin Institute of Technology,1997,13(4):82-85. [14] 朱益民,龚建伟,沙小红. 磁悬浮实验系统的设计与分析[J]. 南通大学学报(自然科学版),2005,4(4):16-18. ZHU Yi-min, GONG Jian-wei, SHA Xiao-hong. The design and analysis of magnetic levitation experimental system[J]. Journal of Nantong University (Natural Science ),2005,4(4):16-18. [15] 刘恒坤,龙志强. 磁悬浮系统在教学中的应用[J]. 实验室研究与探索,2011,30(11):314-316. LIU Heng-kun, LONG Zhi-qiang. Application of maglev system in teaching practice[J]. Research and Exploration in Laboratory,2011,30(11):314-316. [16] 钱玉恒,杨亚非,张 翔. 离散滑膜变结构控制在磁悬浮球系统中的应用[J]. 中国惯性技术学报,2012,20(3): 368-372. QIAN Yu-heng, YANG Ya-fei, ZHANG Xiang. Application of discrete sliding mode variable structure control in magnetic levitation ball system[J]. Journal of Chinese Inertial Technology,2012,20(3): 368-372.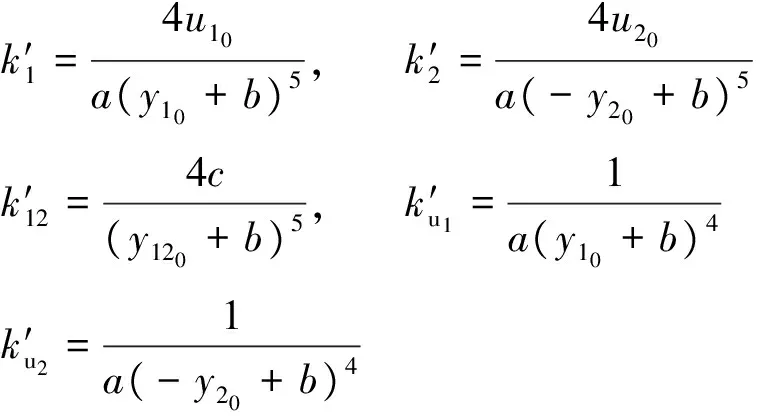


2.3 系统配置方案
3 实验设计

4 结 语
