一种汽车转向装置的转向盘系统研究
2014-01-24长春理工大学机电工程学院曹宾王振宏
长春理工大学机电工程学院 曹宾 王振宏
1 引言
由于汽车传统的转向系统中的转向角传动比固定,汽车转向特性随着汽车速度和侧向加速度变化呈现强非线性时变特性。线控转向系统改变了传统的机械连接方式,使其方向盘和汽车前轮转角之间的关系不再受机械转向系统的限制,同时可以改善汽车转向力传递特性和设计汽车转向角传递特性,这就给汽车转向特性设计带来了很大的空间[1]。汽车线控四轮转向系统包括转向盘系统、电子控制单元、转向执行系统、自动防故障系统、电源系统[2]。基于线控四轮转向汽车的优点,本文针对线控转向系统中的转向核心部件——转向盘系统和路感反馈系统进行理论研究。
2 分析对象的数学模型
2.1 转向盘系统数学模型建立
线控四轮转向系统中的转向盘系统,机械结构包括转向盘、转向柱;电气元件主要有转向盘转角传感器、转矩传感器、路感反馈等。其控制原理为:将所需的方向盘转向转角转换成控制单元能够识别的数字信号,并传递给M CU;MCU经计算得出力矩大小信号,并将其传递给转向执行机构;同时根据该信号的大小,产生转向盘回正力矩,以提供给驾驶员相应的路感信息[3]。通过简化转向盘系统模型如图2.1所示。
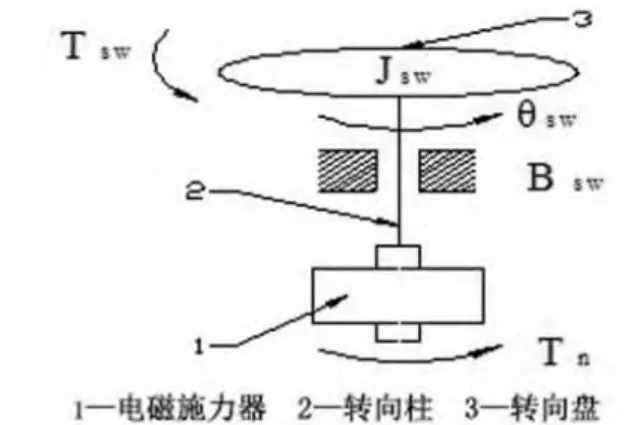
图2.1 转向盘系统模型示意图
根据运动学原理,转向盘系统中方向盘转角θsw与力矩的关系可以通过该系统的运动方程来描述:

式中的参量表示意义:Jsw为方向盘转动惯量;Jn为电磁施力器组件转动惯量;Bsw为转向柱阻尼系数;Tsw为转向盘输入力矩;Tn为电磁施力器电磁力矩。
2.2 转向盘系统仿真模型
由转向盘的工作原理和数学模型,在Matlab软件中建立转向盘系统的仿真模型,其模型如下图2.2所示:
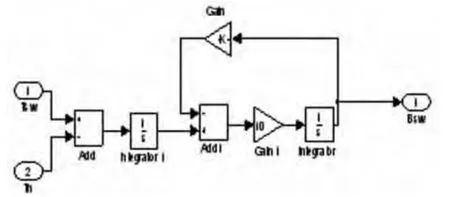
图2.2 Matlab中建立的转向盘系统仿真模型
2.3 电磁施力器数学模型
转向盘系统中的路感反馈模块,实际上是将路面信息对驾驶员再现和反馈,它由电控单元、动力元件和传动机构构成。各部分在路感反馈模块中的作用为:电控单元用来接收主控制器的指令,还对动力元件发出相应转矩的指令;动力元件则根据电控单元发出转矩的指令对转向轴施加与指令对应的转矩;传动机构则是施加的转矩传递部分。
线控四轮转向系统中驾驶员“路感”由电磁施力器模拟实现。电磁施力器的组成结构如图2.3所示,环形永磁铁、转向柱等组成。结构中的环形永久磁铁固定在施力器的转向轴上,导条固定安装在车身上。
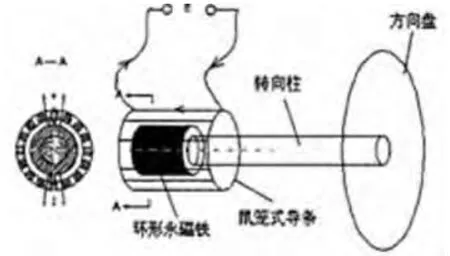
图2.3 电磁施力器结构
建立路感反馈模块中电流电压关系的方程式:

式中的参量为:La是电磁施力器线圈的电感;Ra为电磁施力器线圈电阻;Ia为电磁施力器的电流。
对式2-2进行拉氏变换:

式2-3即为电磁施力器的传递函数表示。进而得出电磁施力器产生的力矩为:

式中:Ka为电磁施力器力矩系数。
2.4 电磁施力器仿真模型
电磁施力器的控制过程为:以车轮转向角δ作为输入激励[4],从而得出车辆质心侧偏角β和横摆角速度Wr的基本参数;由传感器测得的车速u和转向盘转角θsw;利用动力学原理求得转向轮转向阻力矩,再通过比例系数求得电磁施力器的电流,将电流提供给电磁施力器产生力矩以模拟生成相应的路感。电磁施力器仿真模型如下图2.4所示:
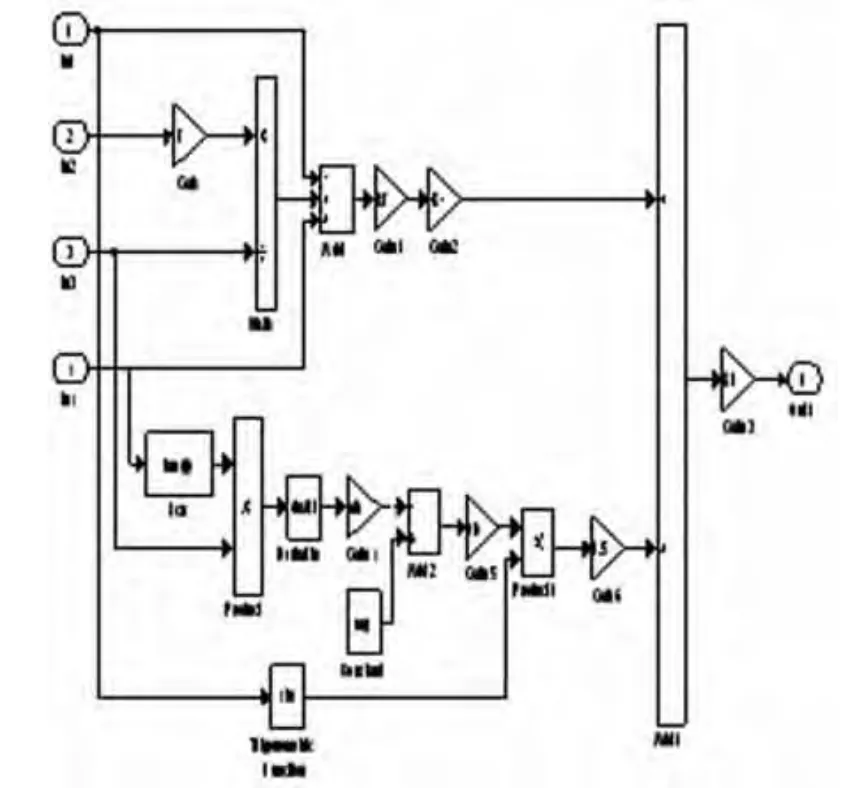
图2.4 电磁施力器仿真模型
3 转向盘系统仿真分析
根据以上所建立的转向盘模型对转向盘输入转角随车速的变化进行仿真模拟,以给方向盘固定的阶跃信号和斜坡信号作为系统的输入激励。其中阶跃信号表示为作用在转向盘上使其转动的转矩,斜坡信号考虑了车辆速度随着时间线性增长。得出转向盘系统的响应曲线如图3.1所示:

图3.1 转向盘响应曲线
a图为车辆行驶速度和时间关系曲线,b图方向盘输入转角随时间的变化关系曲线,c图表示方向盘转角随时间的变化。从图3.1 b图中可以看出:b图中的锯齿状曲线,从时间0到10之间的每个上升的曲线的斜率都在减小,这表明随着车速的增加,为使方向盘转角随时间线性变化,则方向盘的输入转角应不断减小。
其分析结果不仅表明了汽车在高速和低速时转向盘系统这一趋势,通过读取曲线上升的斜率,其最后上升的斜率基本为初始直线上升的一半。
4 结论
本文根据运动学原理,建立了线控四轮转向系统方向盘组件、电磁施力器数学模型和M a t l a b仿真模型,以作用在转向盘上的转矩阶跃信号和速度斜坡信号作为输入激励,对转向盘系统进行了响应分析,其仿真结果表明:
1.随着车速的增加,为使方向盘转角随时间线性变化,则方向盘的输入转角应不断减小。这也进一步验证了数学模型的正确性;
2.当速度线性增加到150 k m/h时,其转向盘的输入转角仅需要初始状态输入转角的一半。
经过对系统的响应分析,该转向盘系统和路感反馈系统可以实现对目标信号的随动,为改善了汽车的转向性能提供依据,同时也为控制系统分析提供了思路。
[1]宗长富,麦莉,郭学立.汽车前轮电子转向系统[J].中国机械工程,2004,15(11)∶1022-1026.
[2]肖生发,赵树朋.汽车构造[M].北京:中国林业出版社:北京大学出版社,2006.8.
[3]崔胜民.现代汽车系统控制技术[M].北京:北京大学出版社,2008.1,78~127.
[4]喻凡,林逸.汽车系统动力学[M].北京:机械工业出版社,2005.7.
