基于射频模块的室内定位系统设计及试验*
2014-01-22陈君梅孙道宗
陈君梅,叶 娟,孙道宗
(1.广东科学技术职业学院广州学院,广东广州510640; 2.华南农业大学工程学院,广东广州510642)
0 引言
随着无线网络技术的高速发展,以及手机等智能终端设备的普及,室内定位服务越来越受到人们的重视。室内定位服务在日常生活、商业活动、科学研究、直至抢险搜救等方面都呈现出迫切的需求[1-4]。美国研究机构ABI 研究员帕特里克·康诺利(Patrick Connolly)称:“室内定位技术是下一波热门定位技术,该技术将在2015~2017年间得到大量部署和实施[5]。”
然而,室内环境是一个复杂的空间,常用的卫星讯号在传播的过程中受到室内建筑结构的影响,定位精度大大下降,甚至无法进行室内定位。当移动物体位于比较封闭的室内空间时,由于存在严重的障碍遮挡及非视距噪声的干扰,其定位问题必须通过探索其他技术来解决[6-7]。自20世纪90年代初以来,国内外对于室内定位开展了大量的研究[8-11],近几年来世界各国研究机构、学术界、产业界等均致力于室内定位的研究,开发了很多热门技术,但各种技术仍存在诸多不足,因此,如何在复杂的室内环境中实现高精度定位,仍然是现阶段定位技术的研究热点和难点。
综合目前国内外的研究成果,定位方法大致可以分为:无线射频RF(Radio Frequency)电磁波、超声与射频RF 电磁波相结合、RFID(Radio Frequency Identi⁃fication,即射频识别)、红外线等[12-13]。由于室内、隧道及农业大棚等受到特殊环境条件的限制,以及受方向性、距离、敷设的可行性等原因的影响,使后3 种方法不适合大范围应用于这些场合。基于无线传感器网络的定位技术具有非接触式和非视距等特点,已经成为优选的室内定位方法之一[14-15]。本研究主要基于无线射频传感器网络节点,进行移动物体室内定位理论及应用研究,设计并实现了一种基于nanoPAN5375射频模块的室内定位系统,对系统进行实验测试与验证,并记录和分析测试数据。试验结果表明,当固定节点组成的等边三角形边长增大后,通过三边质心算法和卡尔曼滤波算法,可得到较为精确的移动节点位置。
1 系统结构及硬件电路
1.1 系统结构框图
室内定位系统主要包含固定节点和移动节点两个部分。固定节点由微控制器、射频模块和磷酸铁锂电池组成;移动节点在固定节点的基础上,增加了显示当前坐标和目的坐标的液晶、用于设定目的坐标的键盘、电机驱动电路和小车。移动节点的结构框图如图1所示。
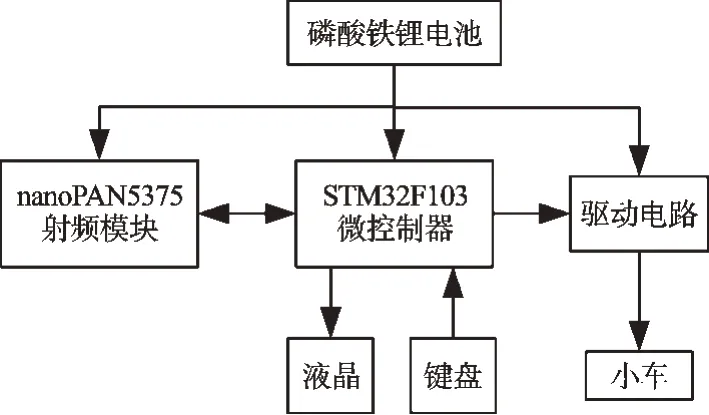
图1 移动节点结构框图
1.2 电机驱动电路
步进电机驱动电路选用NEC 公司的电机驱动芯片MMC-1 和双H 桥驱动芯片L298N。系统配置微控制器PA.8 口为MMC-1 使能端,PA.9 和PA.10 为串口。微控制器利用串口向MMC-1控制寄存器写入控制字,MMC-1通过L298N驱动电机转动。驱动电路原理图如图2所示。

图2 电机驱动电路图
1.3 nanoPAN5375模块
nanoPAN5375是一款基于2.4 GHz ISM频带的RF模块,整合了放大、滤波等组件,采用了nanotron 的宽带线性调频扩频(CSS)技术,对31.25 kbps~2 Mbps 范围的数据传输率能灵活提供,同时提供具有极佳传输范围的可靠数据通信,可实现点对点测距、平面定位、会话传输等功能[16-17]。nanoPAN5375 模块的大小与1元硬币相当,系统中固定节点和移动节点的实物图如图3所示。
2 软件设计
移动节点通过nanoPAN5375模块测得与3个固定节点的距离,经过三边质心算法结合卡尔曼算法滤波确定移动节点的当前位置。软件主要包含nano⁃PAN5375 的测距、三边质心算法、卡尔曼滤波算法。固定节点部分的nanoPAN5375 模块处于等待接收的状态,接收到测距信息时,反馈回移动节点。移动节点定位算法流程图如图4所示。系统总流程图如图5所示,该系统设计了简单的导航功能。
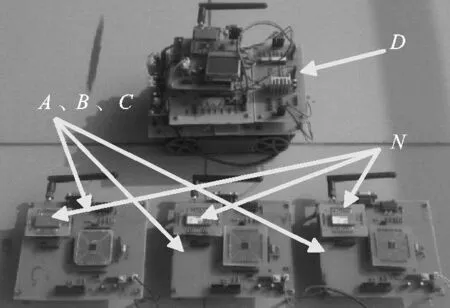
图3 系统实物图
D—移动节点,电路板下方安装有电机驱动的小车,可带动节点移动;A,B,C—固定节点;N—应用在系统中的nanoPAN5375射频模块
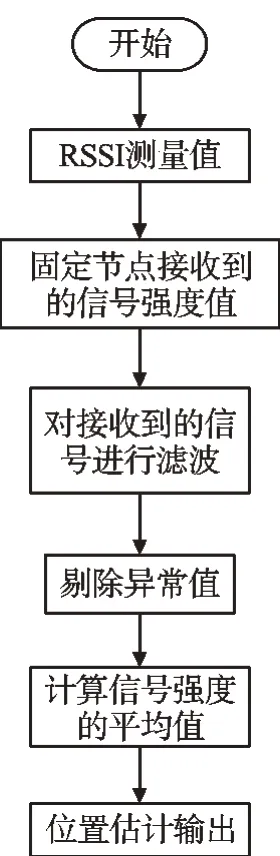
图4 系统定位算法流程图
移动节点和3个固定节点的位置分布示意图如图6所示。
三边质心算法用于实现移动节点位置的确定。系统通过测量移动节点到3 个固定节点的距离,计算相交圆的公共区域的质心来提高对主机位置估算的精度[18-19],示意图如图7所示。
设移动节点D的坐标为(x,y),已知点A,B,C的坐标分别为(x1,y1),(x2,y2),(x3,y3),它们到移动节点D的距离分别为d1,d2,d3。则可得如下方程:
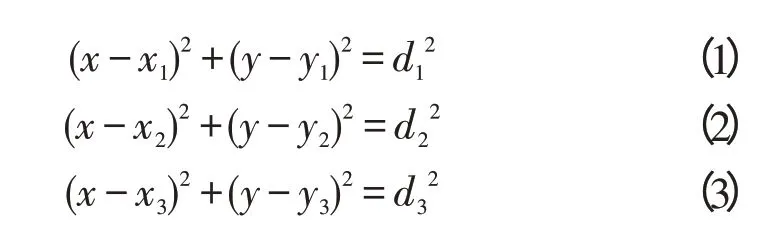
根据式(1~3)可解出圆A与圆C的交点(xac1,yac1),(xac2,yac2),圆B与圆C的交点(xbc1,ybc1),(xbc2,ybc2),圆A与圆B的交点(xab1,yab1),(xab2,yab2)。

图5 系统总流程图
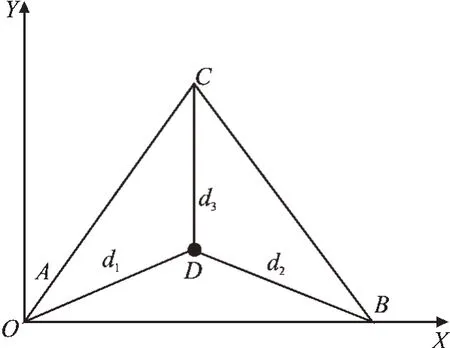
图6 移动节点和固定节点分布示意图
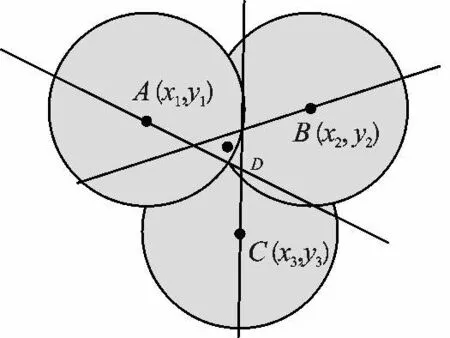
图7 三边质心法示意图
通过将圆A与圆C的交点(xac1,yac1),(xac2,yac2)代入式(x-x2)2+(y-y2)2,经判断大小后可找出两点中距圆B的圆心较近的点,假设为(xac1,yac1)。同理可找出圆B,圆C交点中距圆A的圆心较近的点,设为(xbc1,ybc1),圆A,圆B交点中距圆C的圆心较近的点,设为(xbc1,ybc1)。
依据质心思想估算未知节点的坐标为:

根据以上算法求出移动节点D的位置之后,本研究再利用卡尔曼滤波的推测值来校正移动节点的测量值,提高系统精度。
卡尔曼滤波是一种高效率的递归滤波器(自回归滤波器),它能够从一系列的不完全及包含噪声的测量中,估计动态系统的状态。目标的位置、速度、加速度的测量值往往在任何时候都有噪声。卡尔曼滤波利用目标的动态信息,设法去掉噪声的影响,得到一个关于目标位置的好的估计。这个估计可以是对当前目标位置的估计,也可以是对于将来位置的估计(预测)或对过去位置的估计(插值或平滑)[20]。
3 试验与结果分析
本研究将3个节点固定在边长为6 m的等边三角形的3个顶点上,通过移动节点自带的键盘,设定移动节点坐标后,移动节点自动以10 cm/s 的速度在等边三角形内移动时,笔者实时测量移动节点的位置坐标,所记录的测试数据如表1所示。
由表1可知,在边长为6 m的等边三角形内,移动节点运动后X坐标的平均相对误差为12.72%,最大相对误差为21.57%,Y坐标的平均相对误差为15.81%,最大相对误差为32.91%。
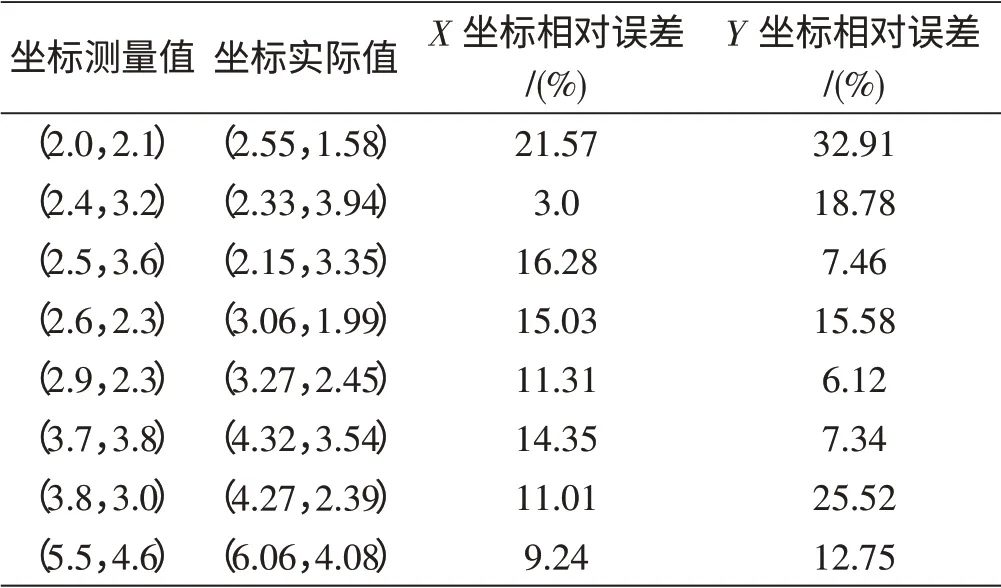
表1 6 m边长等边三角形内的测试数据
笔者进一步增加等边三角形的边长,使三角形的边长在16 m~70 m 之间,移动节点与3 个固定节点在较大范围测量的距离如表2所示。

表2 移动节点与3个固定节点的距离
由表2 可知,移动节点距离A点的平均相对误差为2.36%,最大相对误差为5.67%;距离B点的平均相对误差为3.4%,最大相对误差为6.92%;距离C点的平均相对误差为1.39%,最大相对误差为2.4%。移动节点距离固定节点A、B、C的平均测量误差分别为0.5 m、0.8 m、0.4 m,移动节点距离固定节点A、B、C的最大测量误差分别为1.1 m、1.53 m、0.58 m。
试验结果表明,增加固定节点A、B、C之间的距离后,在新组成的等边三角形内,移动节点分别与3个固定节点距离的平均相对误差和最大相对误差均大幅度减小,这是由于增大移动节点与固定节点之间的距离后信号传播时间较长,干扰和时钟误差等对测量结果的影响相对较小。增加固定节点之间的距离后,平均误差均小于室内定位导航要求的1 m,最大测量误差超出了0.53 m,实现了比较精确地测量。
4 结束语
该系统以STM32F103 微控制器为核心,结合nanoPAN5375 模块,构成3 个固定节点和1 个移动节点,编写相应算法和软件,实现了室内移动物体的实时位置测量。试验结果表明,移动节点与3 个固定节点在测量距离较大的情况下,该系统具有较高的定位精度。而较大的测量距离正是大型室内空间中移动物体定位所需要的,因此,该系统具有较好的实用性。
该系统具有简单的导航功能,在移动节点上设定坐标后,移动节点能自动以10 cm/s 的速度从当前坐标向目的坐标移动。该系统经改进后可用于室内车间、矿井、隧道、地下车库、温室大棚等室内需要定位或导航的装备上,通过将该系统中的小车替换成其他满足需求的动力装置,则可实现较为快速地移动,以满足生产需求。
(References):
[1]毛利洋,林秀晶,邵开来,等.基于RSSI的无线传感网络协同定位算法及其应用[J].机电工程,2012,29(1):116-119.
[2]邱元阳.无处不在的定位技术[J].中国信息技术教育,2014(5):67-70.
[3]PETRIU E M,GEOGANAS N D,PETRIU D C,et al.Sen⁃sor-based information appliances[J].IEEE Instrum enta⁃tion and Measurement Magazine,2000,26(10):31-35.
[4]刘 勇.室内也定位[J].百科知识,2014(2):28-29.
[5]杨宇良.诺基亚的“复国”运动[J].软件工程师,2012(10):12-14.
[6]宦若虹,李义冬,何晓慧.基于无线传感器网络的室内定位系统[J].机电工程,2011,28(8):910-913.
[7]张骁耀,王 玫.基于CSS技术的室内定位通信系统的研究与实现[J].微型机与应用,2012,31(13):49-52.
[8]BAHL P,PADMANABHAN V N.RADAR:An In-building RF-based User Location and Tracking System[C]//Proceed⁃ings of the IEEE INFOCOM 2000.New York:IEEE Com⁃puter and Communications Society,2000:775-784.
[9]WANTR,HOPPER A,FALCAO V,et al.The active badge location system[J].ACM Transaction on Information Systems,1992,10(1):91-102.
[10]HARTER A,HOPPER A.A distributed location system for the active office[J].IEEE Network,1994,8(1):62 -70.
[11]赵 爽.谁掌握着室内导航的核心?[J].国际太空,2014,421(1):31-33.
[12]杨 锌,林基明,刘争红.基于nanoLOC 的嵌入式定位系统[J].计算机系统应用,2012,21(9):38-42.
[13]范 迪,吕常智,李 虎.基于射频模块的矿井巷道人员定位的实现[J].煤矿机械,2007,28(2):72-74.
[14]KWAKM CHONGJ.A New Double Two-way Ranging Algo⁃rithm for Ranging System[C]//IEEE International Confer⁃ence on Network Infrastructure and Digital Content.Bei⁃jing:[s.n.],2010:470-473.
[15]司海飞,杨 忠,王 珺.无线传感器网络研究现状与应用[J].机电工程,2011,28(1):16-20,37.
[16]NANOTRON.NanoLOC TRX Transceiver(NA5 TR1),us⁃er's manual[Z].NANOTRON,2006.
[17]杨 骏,陈建政,冯艳波.基于NanoPAN5375 的测力轮对无线传输系统[J].工程与实验,2009,49(4):75-77.
[18]高 雷,郑相全,张 鸿.无线传感器网络中一种基于三边测量法和质心算法的节点定位算法[J].重庆工学院学报:自然科学版,2009,23(7):138-141.
[19]裴庆祺,赵 军.基于网格分布的三角形内点测试定位算法[J].计算机工程与设计,2008,29(18):4658-4661
[20]宋迎春.动态定位中的卡尔曼滤波研究[D].长沙:中南大学信息物理工程学院,2006.