基于DSP核心的指针式仪表自动检定装置
2014-01-21王永东
王永东
(辽宁建筑职业学院,辽宁 辽阳 111000)
0 引言
由于结构简单,指示明显,价格低廉,指针式仪表目前仍是工业领域中应用非常普遍的测量仪表之一,不仅数量大,而且种类多,如万用表、汽车仪表、压力表等等。这些仪表在出厂前,需要对精度进行检定,同时仪表在使用过程中也会产生误差,也需要进行定期检验,以判断是否满足精度要求。采用人工观测读数的方法对指针式仪表进行检定,由于受人的观测角度、观测距离、眼睛在大量视觉工作之后会出现视觉疲劳等影响,检定结果不稳定、可靠性不高,检定效率较低。因此实现对指针式仪表的自动检定,提高检定效率和精度,就成为一个具有实际意义的问题。
1 指针式仪表自动检定装置整体设计方案
本文以常见的扇形表盘的模拟指针式电压表为例,检定时主要以仪表指针指向主要刻度点时的误差情况,作为对仪表整体性能的评价。
根据具体要求和性能价格比的不同,指针式仪表自动检定装置可以采用不同的图像采集系统进行图像处理和识别。本文研究一种基于机器视觉的指针式仪表自动检定装置,将DSP 作为检定系统的核心,通过图像处理方法分别获取各个基准信号下仪表指针的位置,从而反映仪表的示值读数,最后获取仪表的误差。针对本文研究的模拟指针式电压表,选取与之相配的硬件,设计检定系统分为以下几个部分,系统框图见图1。
(1)被测仪表固定单元: 将指针式仪表固定在特定的位置上,使装置对它读数获得稳定的数据来源。
(2)指针式表盘成像单元: 选取合适的镜头。
(3)指针式表盘图像信号采集单元: 通过图像传感器(CCD 或CMOS)采集图像。
(4)指针式仪表指针位置与示值识别单元:选择已发展功能强大,处理速度快的DSP 芯片为核心的图像处理系统对采集的图像经识别和处理。针对研究目标的特殊性,经过计算目标要求的指标来选择合适大小的DSP 芯片。
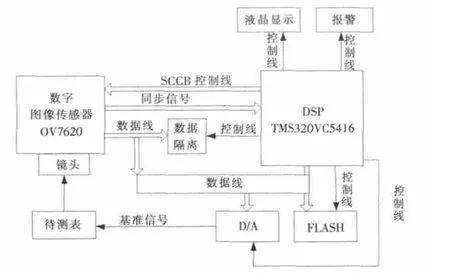
图1 系统框图Fig.1 System structure frame figure
(5)基准信号输出单元:从DSP 出来的数字信号经D/A转换装置将信号转换成对应的识别量的电压值(模拟信号)用来做为标准源到待测表中[1]。
2 指针式仪表自动检定装置工作流程
检定时以量程为5V 的电压表为例,表盘中有50 个小格,每个最小格代表0.1V,有6 个主要刻度(0,1,2,3,4,5)。首先由基准信号输出单元输出一系列基准信号给待检定仪表,然后表盘图像信号采集单元通过摄像机将表盘指针偏转状况转换成数字图像并保存,再通过图像处理方法在仪表位置与示值识别单元识别出基准信号下仪表指针的位置,从而反映仪表的示值读数,经计算最后获取仪表的误差,进而判断仪表是否合格。系统流程如图2 所示。
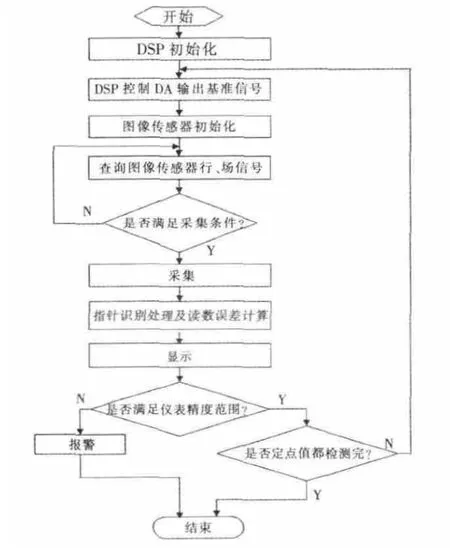
图2 系统工作流程图Fig.2 System work flow chart
3 工作原理
本装置的核心是能否达到预定的准确度指标,这就要求装置的每一部分在选择和匹配上要达到协调和最优工作。根据国家标准GB776-76 《电气测量指示仪表通用技术条例》的规定,准确度分为7 级,即0.1、0.2、0.5、1.0、1.5、2.5、5.0 级。而最大引用误差常用来表示电测量指示仪表的准确度等级,它们之间的关系是[2]:

式中: Rnm—最大引用误差;α—仪表准确度等级指数;△Xm—仪表最大绝对误差;Xm—仪表的量程。
本装置的研究对象为一只量程为5V 的电压源表盘,每一小格为0.1 伏,表的精度为1/50,准确度为2.5,所以待检表最大误差±2.5%。工程上一般用准确度度级别高于待检表级别来检定,故本系统检定级别在至少一个准确度级别以上,系统至少最大误差Rnm≤1.5%。
通过组成检测系统的各环节检测元件或仪表的误差求得系统的最终的误差,即为检测系统误差的综合。根据误差理论可按概率统计方法,按各环节误差的均方根求得的误差估计系统的误差[3],即:

由σ≤Rnm,系统各器件取一个比较合适的量,定为小于1%。根据这个标准选择器件的参数。
3.1 表盘成像及固定单元
要求待测表和镜头的位置最佳以保证采集表盘图像时最佳的成像。针对表盘尺寸,需要处理的对象是一个小目标,不需要大的空间,无需高分辨率的面扫图像传感器就可实现。基于系统的要求以及图像传感器的成本和供货状况等方面的考虑,本系统采用豪威科技公司推出的一款VGA CMOS 图像传感器OV7620 CameraChip。OV7620 的内部结构如图3 所示。

图3 图像传感器的内部结构Fig.3 Interior structure of image sensor
已知拍摄对象和取景范围后,可选择合适的镜头。理论上薄镜头的光学成像如图4 所 示: 在 实际中,使用的是镜头组,与理论上有一定的偏差,但基本上接近。选择镜头时可直接考虑薄镜头。选择镜头的计算公式如下:
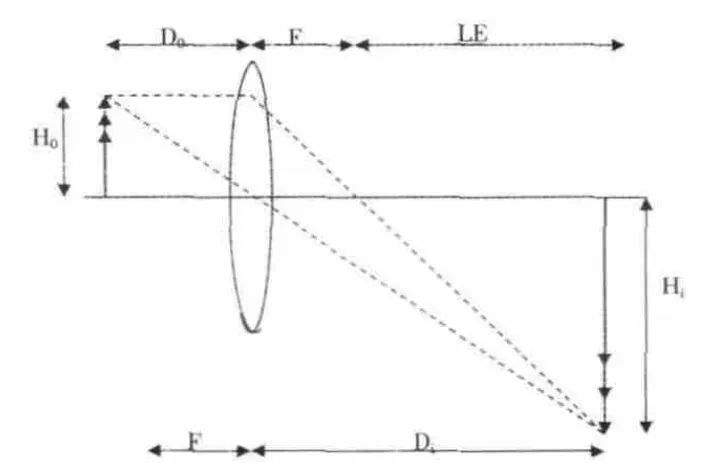
图4 薄镜头的光学成像示意图Fig.4 Dioptric imaging of wafery lens

其中,Mi—放大倍数;F—焦距;LE—镜头范围;Hi—像高,Ho—物高;Di—像距,Do—物距[4]。考虑检定工作是在日常的光照下进行,也为本设计的方便性,在不加光照的情况下就可进行图像采集和识别,选6.0mm焦距,稍小视角的镜头,并控制物距为120mm,使自然光或可眼睛适度的照明为本系统的光源。将表头固定在镜头正对方位,Ho=63mm,Do=120mm,F=6mm,则放大倍数Mi≈0.0526,Di≈6.316mm,系统图像传感器安装完后调节镜头的像距6.316mm。
3.2 表盘图像信号采集单元
这部分的主要功能是获取模拟图像、产生数字图像,即对获取的模拟图像进行抗混叠滤波、放大、A/D转换以及图像截取等预处理,从而得到满足系统要求的数字图像数据,并为系统提供同步信号等。主要器件就是图像传感器。
OV7620 是一款高度集成、高分辨率(640*480)、隔行/逐行扫描、CMOS 数字彩色/黑白视频摄像芯片。其数字视频端口支持60HZ YCrCb 4:2:2,16 位/8 位模式,ZV 端口输出模式,RGB 原始数据16 位/8 位输出模式和CCIR601/CCIR656 模式。内置的I2C 界面为控制内置摄像功能提供了简便的方式。OV7620 是一个1/3” CMOS图像设备。传感器包括大约326×688 个像素,它基于逐行转换的电场读出系统和带同步像素读出系统的电子快门。传感器的滤色镜包含了主要颜色RG/GB 阵列,以隔行方式排列。
大部分的信号处理都在模拟处理单元里实现,其中进行色彩分离,矩阵变换,自动增益控制,灰度校正,色彩平衡,色彩校正,黑面水平校正,平滑,光圈校正,亮度色度图象控制和排斥过滤。内建的SCCB(Serial Camera Control Bus,串行摄像控制总线)完成视频摄取和A/D 变换。由于OV7620 集成度高,外围电路设计比较简化,仅由石英晶体和一些电阻电容等元件组成。
(1)图像传感器OV7620 的数字信号输出有8 位和16位模式两种。由于本系统针对灰度图像进行处理,为了简便和实用起见,采用16 位模式。数据输出只采集OV7620 低8 位(Y7—Y0)亮度数据,用于为后续数据处理模块提高数字图像数据源。
(2)通过(OmniVision Serial Camera Control Bus)SCCB 编程模式,采用外部微控制器对OV7620 进行编程,可以改变OV7620 内部寄存器内容,从而改变其各项缺省设置参数。本系统是利用DSP 芯片TMS320VC5416 的通用I/O 口模拟SCCB 总线接口,实现对OV7620 内部参数的修改。
(3)同步信号VSYNC、CHSYNC 等以及象素时钟PCLK,用于保证所传输的数字图像数据存储位置的准确,为后续数据正确处理提供了保障。
(4)其它部分按照要求通过电阻或电容接高或接地。
3.3 仪表指针位置与示值识别单元
近年来,以DSP 为核心的图像采集处理系统以其体积小、处理速度快、使用灵活方便等特点已被广泛应用于要求处理速度快、实时性要求高的各种场合。本装置硬件上的器件核心为DSP,其他器件都由DSP 来控制。DSP 采用I2C 总线方法对图像传感器进行初始化,通过I/O 口得到图像数据;DSP 外围电路采用与所选DSP 芯片所匹配的电源、FLASH、复位电路;对FLASH 和D/A在DSP 内部分配地址以便确定DSP 输出信号后的走向,数据从数据线得到需要的结果。DSP 芯片通常根据算法的复杂度和存储量及处理速度来选择。图像有效信息占据空间不大且无特别复杂的信号处理算法,选择TI 公司的TMS320VC5416 就可以实现装置核心控制计算的功能,即主要对采集到的指针式仪表图像的指针位置和示值进行识别[5]。
3.4 基准信号输出单元
DA 数模转换器是DSP 较常用的外设之一。在选择DA 上除了选择误差小于1%、在满足精度要求的条件下,选精度8 位,也就是1LSB 的非线性度以外,还有分辨率问题。取一个八位分辨率的DA 来看,要检测5V量程的表,若DA 的Vref 为5V 时,DA 的分辨率为(1/255)×5V≈0.0196V,这时的量化误差(1/255)×2≈0.0078<1%,符合要求。因为是针对5V 量程的电压表进行设计的配套检定装置,故在DA 的选择上选择输出方式、输出电压范围易于得到的芯片。TMS320 系列DSP 接口的TLC7528 芯片能快速控制数字信号且价格便宜,可选用。同时可选用低电耗的LCD 数字显示电路和扬声器即可用于显示和报警电路。
4 实验数据及分析
本文选择一种0~5V,0.1V/格扇形均匀刻度线的2.5级准确度电压表作为检定测试目标,根据推算系统取一个合适的误差量,定为1%。检定时,由DSP 控制基准数字信号到DA 之后,从系统出来的基准电压连接到待测电压表上,使表有相应的数值,进行图像的采集和识别后,读出数值和基准电压比对,得到检定的数值,若在表的允许误差内,则视为合格,若超出,则不合格,则报警,并将每次检测的误差值显示出来。本实验误差值显示三位数,为误差值百分数扩大100 倍得到,结果见表1。经计算,当表的显示值>249,即表的误差大于2.5%时,该表为不合格,启动控制喇叭响。从上述实验数据可以看出,该装置达到设计要求,能够实现自动检表任务。

表1 实验数据Tab.1 The experimental data
5 结论
本文针对模拟指针式仪表的检定问题,研究了一种基于机器视觉系统,以DSP 为核心处理的自动检定装置,并将检定基准源简化,在保证精度和检定时间的前提下,完成检定工作,提高检定工作的灵活型。实验结果表明该自动检定装置达到了指定精度范围内要求的机器检表任务,可改善仪表检定系统的庞大和复杂应用,具有一定的应用意义。
[1] 史春燕.指针式仪表自动检定装置的研究[D].沈阳:沈阳工业大学,2008.
[2] 金维香,张颖.模拟仪表与数字仪表准确度的表示及区别[J].长沙电力学院学报(自然科学版),2001,2.
[3] 陈永刚.检测仪表及其测量系统精度确定及分析方法[J].仪器仪表用户,2001,1.
[4] 刘焕军,等.机器视觉中的图像采集技术[J].电脑与信息技术,2003,1.
[5] 汪安民,陈明欣,朱明.TMS320C54xx DSP 实用技术[M].北京:清华大学出版社(第二版),2007.