永磁同步电机矢量控制系统的建模与仿真
2014-01-21胡杨昊易灵芝李真贵
胡杨昊,易灵芝,李真贵
(湘潭大学 信息工程学院,湖南 湘潭 411105)
0 引言
随着高性能永磁材料的发展,永磁同步电机(PMSM)因体积小、效率高、功率因数高、转动惯量小等优点,在各个领域得到了广泛的应用[1]。同时永磁同步伺服系统是一个非线性、强耦合、时变的复杂系统,因此需要通过合理的数学变换,建立其解耦的状态方程。
1971年德国学者Blaschke 等[2,3]提出了矢量控制(VC)理论,使交流电机转矩和磁通的控制实现解耦。目前永磁同步电机伺服系统中多采用空间矢量控制(SVC)技术[4,5],不仅可以提高逆变器的电压输出能力,且恒定的开关频率适合数字化控制。本文基于矢量控制技术,建立了PMSM 伺服系统的仿真模型,并进行了仿真验证。
1 永磁同步电机的数学模型
为简化分析,作如下假设: ①忽略铁心饱和效应;②气隙磁场呈正弦分布;③不计涡流和磁滞损耗。永磁同步电机在三相静止坐标系U-V-W 下的电压方程为:

在三相绕组中有:

采用Clarke 变换和PARK 变换,将三相固定坐标系转换为两相旋转坐标系,得到解耦后的状态方程为:

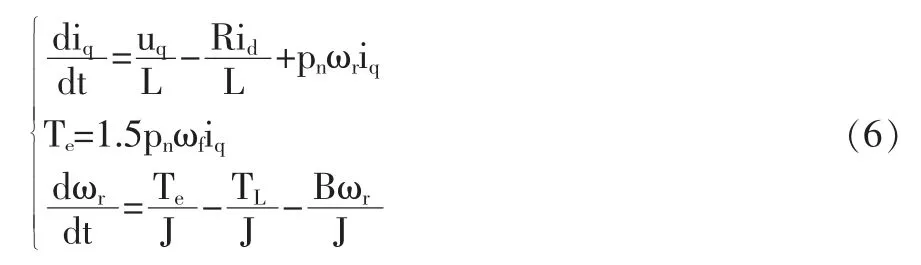
转矩方程为:

运动方程为:

式中,id、iq—dq 轴电流;ud、uq-dq 轴电压;RS—定子电阻;L—等效dq 轴电感;pn—极对数;φf—转子磁势;ωr—转子机械角速度;J—折算到电机轴上的总转动惯量;B—粘滞摩擦系数;TL—折算到到电机轴上的总负载转矩;Te—电磁转矩。
从式(4)可看出系统的电压电流是紧密耦合的。通过矢量控制方式实现交流电机的解耦控制,则式(4)可简化为:
通过以上数学模型可知,永磁同步电机矢量控制原理如图1 所示。
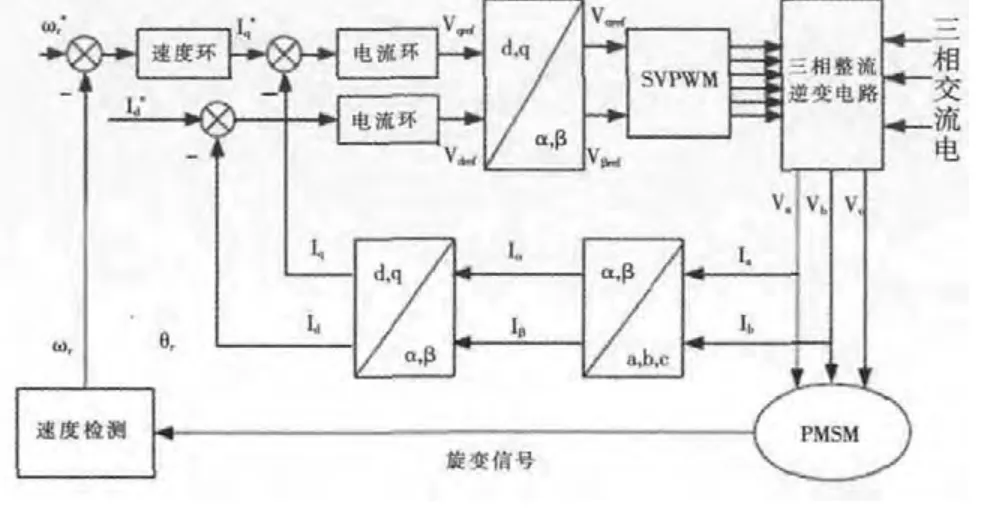
图1 PMSM 伺服系统矢量控制原理
2 控制系统建模
在Matlab7.0 环境下,构建出永磁同步电机伺服系统矢量控制仿真模型如图2 所示。系统由坐标变换、扇区计算、作用时间计算、基本电压矢量作用时间、导通时间计算、PWM 生成等子模块组成。

图2 PMSM 伺服系统矢量控制仿真模型
2.1 坐标变换模块
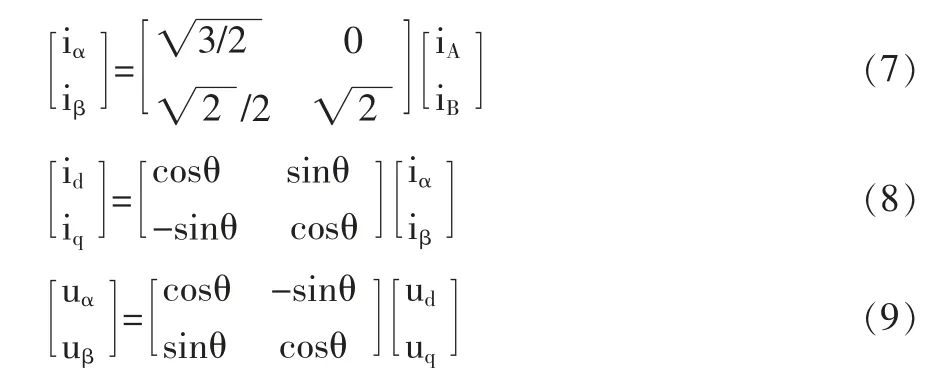
坐标变换分为: 三相电流转换为两相的clarke 变换,如式(7)所示;两相电流转换为励磁和转矩电流的park 变换,如式(8)所示;磁场和转矩电压转换为两相的park 变换,如式(9)所示:
2.2 空间矢量扇区计算模块
各个扇区与uα、uβ的关系如式(10)所示,其中:uα、uβ—等效两相相电压;u1、u2、u3—扇区计算因子;N—扇区数。

2.3 矢量作用时间因子计算模块
两个相邻的电压空间矢量在一个PWM 周期中的作用时间,可以通过式(11)计算出来。其中:uα、uβ—两相相电压;T—开关周期;U—直流母线电压;X、Y、Z—导通时间因子。
2.4 基本电压矢量作用时间模块
为了计算不同扇区的导通时间,扇区和导通时间的对应关系如表1 所示。

表1 扇区和导通时间
当T1+T2>T 时:

其中: T1、T2—相邻两基本矢量的导通时间;T—开关周期;T1'、T2'—处理后的相邻矢量导通时间。
2.5 导通时间计算模块
计算方程如式(12)所示:

其中: t1、t2—等效的导通时间;t0—0 矢量的导通时间;CMP0、CMP1、CMP2—导通时间因子。
2.6 PWM 生成模块
该模块实现了将三个桥臂导通时间转换为器件的0或1 开关状态,仿真模型如图3 所示。
3 仿真及结果分析
采用上述永磁同步电机伺服系统矢量控制系统仿真模型,对永磁同步电机进行空载变速及恒速加载运行仿真。电机参数为: Pn=50*746W;Vn=460V;np=2;Rs=0.087;Lm=34.7e-3H;J=0.00095kg·m2;B=0;Vdc=350V;Ts=2μs;ψr0=10-3Wb。
图4 是对给定参考转速为±100rad/s 变化的方波信号,电机空载条件下运行时的仿真曲线。仿真曲线包括: 三相电流ia、ib和ic;电机转速和电磁输出转矩。相电流达到稳态,转矩输出保持为零,参考转速信号由+100rad/s跳变为-100rad/s,电磁转矩跳变为负的最大值,电机开始反向加速,直到电机转速达到负的最大值,电机输出转矩再次跳变为零,电机转速保持为-100rad/s。

图3 PWM 生成模块
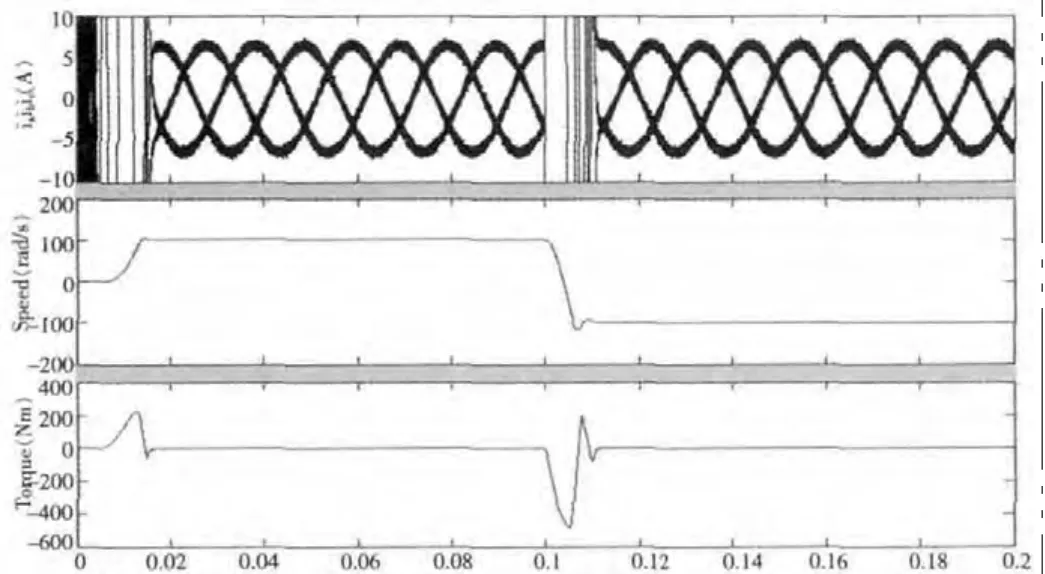
图4 空载时系统仿真曲线
图5 是带负载时的控制仿真曲线,当电机转速达到稳定值+100rad/s 后,在0.1s 时,给电机忽加Tl=100Nm的负载,此时电机输出转矩从零迅速跳变为额定负载值,转速瞬时跌落约为2%,恢复时间约为0.06s,系统具有良好的抗负载扰动的能力。
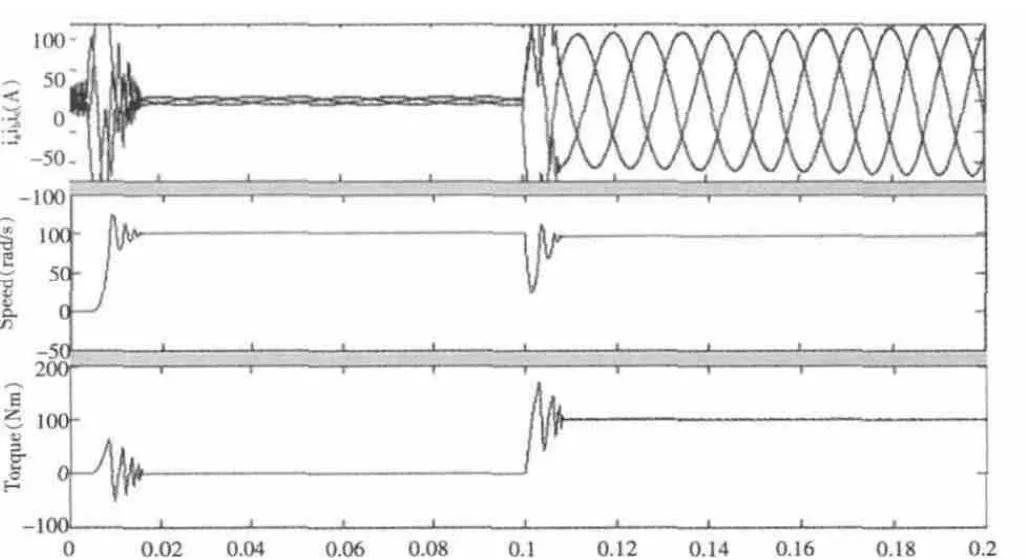
图5 加负载时的系统仿真曲线
4 结束语
本文通过对永磁同步电机数学模型的分析,建立了PMSM 的矢量控制系统,并在Simulink 环境下建立了该系统的仿真模型;进行仿真实验。仿真结果表明,在空载和负载情况下,系统能平稳运行且具有良好的速度响应,为PMSM 伺服系统的控制提供了有效的控制方法。
[1] 陈伯时.电力拖动自动控制系统(第2 版)[M].北京:机械工业出版社,2000.
[2] Liang ZH. Study of Intelligent Conrtol for Permanent Manget Synchornous Motor of AC Servo System[D].Shenyang: Shenyang University of Technology,2009.
[3] Li SY.Fuzzy,Neura and Intelligent Contorl Theory[M].Harbin: Harbin University of Technology PublishingHouse,2006.
[4] 赵西梅.交流电机伺服系统的发展现状及研究热点[J].伺服控制,2010,1.
[5] 张彦照.永磁同步电机伺服系统[D].南京航空航天大学,2009.