采用极限学习机的运动阴影检测模型
2014-01-21马无锡陈欲勐郑莉晓
马无锡,陈欲勐,郑莉晓
(浙江工贸职业技术学院,浙江温州325003)
采用极限学习机的运动阴影检测模型
马无锡,陈欲勐,郑莉晓
(浙江工贸职业技术学院,浙江温州325003)
针对智能交通系统中车辆阴影严重影响运动目标检测的问题,在混合高斯前景检测的基础上,提出了一种基于极限学习机的阴影检测方法。该方法只需提取前景像素点处的梯度值及其邻域的方差值来作为特征,并通过极限学习机来对其进行分类,获得真实阴影区域,无需预先设置任何经验阈值。最后实验结果表明,与传统方法相比,该方法不仅实现简单,而且可以准确地检测出阴影内部区域和阴影边缘区域。
运动检测;背景建模;极限学习机;阴影检测;归一化互相关
0 引言
在视频分析中,运动目标检测是进行其他后续检测的先决条件,一直以来是一个非常重要的研究课题。常见的运动目标检测方法主要有:帧差法、混合高斯模型、核密度估计算法、码本算法、Vibe算法和基于这些算法的改进算法。然而这些算法都会将运动物体及其阴影一同检测出来,这会导致无法正确地判断出物体的大小、位置等信息;而且阴影会造成相邻目标之间的粘连,使得对获取的前景信息还需进一步处理。因此,如何检测并有效消除阴影给运动目标检测带来影响这一课题有着十分重要的意义。
阴影除了具有亮度低于背景亮度、颜色不变性、纹理不变性这几个共性外,在不同场景下的模式各不相同,很难采用一种通用的方法来彻底消除其在运动目标检测中产生的影响。因此,一般是针对某些特定场景下阴影所具有的特点来寻找相应的检测方法。前人针对阴影检测这一问题进行了一系列研究:张玲等人[1]在采用混合高斯模型检测前景的基础上加上LBP纹理相似性比较来减少物体内的孔洞和消除阴影前景。但是对于纹理信息不丰富的场景,该方法不能达到预期的效果。史波等人[2]在提取HIS色彩空间特征的基础上对特征进行统计,根据统计结果来估计高斯分布中的参数,从而估计出图像中每个像素属于阴影的概率。但是该方法是以所提取的特征符合高斯分布为前提条件,如果特征统计直方图出现多峰情况则该方法目前无有效解决方案。王彬等人[3]结合了通过背景差分、角点检测、颜色空间等几种方式获得的掩膜来实现阴影的检测。但是文中未对目标物体上角点存在的稳定性和数量多少对阴影检测效果的影响给出说明,如果当物体上角点数量过少的时候,效果应该不太理想。姜柯等人[4]在ANDRES SANIN等人[5]的基础上,在YUV颜色空间中提取边缘纹理特征,采用抽样推断方法估计检测阈值,从而自动完成阈值的估计适用于各种光线条件。但该方法同样是以特征变化率符合高斯函数为前提条件,如果出现多峰的情况则需要采用另外的方法进行处理。查宇飞等人[6]在提取颜色特征、纹理特征通过boosting学习来对目标和阴影进行区分,最后在判别随机场中结合前景和阴影的时空一致性再通过图像分割的方法来获得最终的效果。然而该方法实现较为复杂,实时性不好。RUIQI GUO和JEAN-FRANCOIS LALONDE等人[7-8]采用支持向量机、决策树、条件随机场这几种分类器根据提取的特征对图像中的阴影进行分割,达到了不错的效果。但是文中的检测环境所包含的色彩信息较为丰富,阴影和环境的区分度较明显,这和视频监控中的场景差别较大,而且这些所提的方法都比较耗时,不太适用于实时性高的场合。
文中使用的方法是在前人工作的基础上,结合混合高斯模型前景检测算法,提出一种基于极限学习机的阴影检测方法,该方法不仅可以检测出大部分阴影区域,并对于阴影边界的消除也有较好的效果,无需再采用额外的方法进行阴影边界的消除,也无需设定相应的检测阈值。因此,在保证一定检测效果的前提下,文中所提出的方法实现简单,可以满足视频检测的实时性要求。
1 基于改进混合高斯模型的目标检测
混合高斯模型主要是基于图像中某个像素点的灰度值变化符合高斯分布的假设,采用k个单高斯模型来描述像素点的分布。基本原理为每个像素根据其在最近t帧内的灰度值{X1,X2,X3,…,Xt},则在下一帧该像素值为背景的概率为:

其中,Xt表示像素点(χ0,y0)在t时刻时的像素值;k表示混合高斯模型中高斯分布的个数;ωi,t表示混合高斯模型中第i个模型在t时刻的权值,满足表示t时刻第i个模型的高斯分布,具体公式如下:

其中,n表示维数;μi,t表示均值;表示协方差矩阵。
根据公式(1)和(2)可以看出,混合高斯模型中含有大量的浮点运算,这无疑会影响算法的效率,因此在保证前景检测效果的前提下,文中采用浮点数定点化的方式来实现混合高斯背景模型,这样大大提升了算法的运算速度。
2 极限学习机算法介绍
极限学习机(ELM)理论是由南洋理工大学的黄广斌教授于2004年提出的,该方法克服了传统神经网络学习算法中人为设定参数和容易产生局部最优解的缺陷,不仅可以提高神经网络的学习速度,而且有着非常好的泛化能力。
极限学习机的基本原理可以如下描述:在给定样本X={(χi,ti|χi∈Rn,tj∈Rm,i=1,2,3…,N)},其中χi=[χi1,χi2,…χin]T表示输入特征向量,ti=[ti1,ti2,…,tin],表示为目标向量。隐含节点个数为L,激励函数g(x),则输出目标向量表示为:

其中,wi表示输入权值;bi表示隐藏层的阈值;βi是第i中间层到第i输出层的权值;oj是输出目标向量。存在着这样的βi、bi、wi,使得公式(3)零误差逼近目标向量,即然后取H,β,T表示如下:

则可以表示为

设H的Moor-penrose广义逆矩阵为H˜,则求得

根据前面的描述,可以将极限学习机的参数计算步骤主要分为三步:
第一步:输入权值wi与隐藏层的阈值bi随机赋值,其中i=1,2,…N˜;
第二步:计算由隐藏层输出的矩阵H;
第三步:计算β˜=H˜T,其中H˜=(HTH)-1HT
3 基于ELM的阴影检测
在ANDRES SANIN等人[5]所提出的多种阴影检测方法,均是在RGB、HIS、HSV等颜色空间的基础上来进行阴影区域特征的提取。相对于灰度图像,从颜色图像中确实可以提取到更为丰富的特征,有助于阴影的检测,但是也增加了额外的资源消耗。如果仅仅使用从灰度图像中提取的相关特征便能取得较好的阴影检测效果,不仅可以减少资源消耗,也可以增加检测的实时性。以视频图像的灰度图像为处理对象,文中通过比较分析三种较为常用的阴影检测方法,得到了可以表征阴影区域的相关特征。
3.1 阴影特征提取
文中分别对王晓红、J.C.S.Jacques和张露等人[9-11]提出的三种提取特征方法进行了研究,以测试视频中的某一帧图像作为研究对象,如图1所示,分别将三种方法用于阴影的检测,检测结果如图2所示。其中,图2-(a)是采用传统的NCC检测方法得到的结果;图2-(b)是采用当前帧与背景比值检测方法得到的结果;图2-(c)是在RGB颜色空间中,将像素值作为一个三维向量,比较当前帧图像像素和背景图像像素两个向量之间的夹角来得到的结果。从这三张图中可以看出,RGB颜色空间检测方法可以很好的将阴影区域的边缘检测出来,但是却会将目标的大部分主体误检为阴影;而其他两种方法虽然可以减少误检像素,但是对于阴影区域的边界却无法进行检测,而需要其他的检测方法。
通过观察显然可以看出阴影边缘处的梯度比较强,这是一个区别于阴影区域和目标区域的明显特征。因此若采用梯度作为阴影边缘的特征则可以轻易进行消除。综上所述,采用像素点的梯度值及其领域的方差值来作为特征就可以达到检测阴影内部区域和阴影边缘的效果。

图1 当前帧图像、背景图像和前景图像
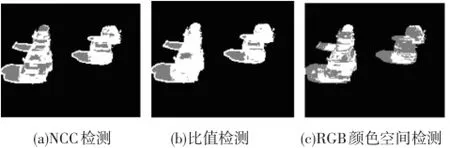
图2 三种常规的阴影检测结果
3.2 极限学习机训练
基于前面描述的阴影特征的提取,将混合高斯模型检测得到的前景分为三类:阴影内部区域(记为类别0)、阴影边缘区域(记为类别1)和非阴影区域(记为类别2),这三个类别的掩码图像如图3所示。通过类似图3所示的掩码图像便可以提取位于不同类别的前景图像区域的特征。按照这种特征的提取方式,可以人工选取某个场景的一些具有代表性的图像来作为该场景的训练样本来对ELM进行训练。
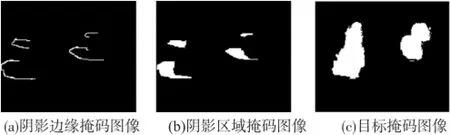
图3 前景像素中三类像素的掩码图像
3.3 实验结果及分析
文中采用智能交通系统中目标阴影较为明显的视频作为测试对象。通过采用前面所述的基于ELM阴影检测方法来进行检测,并将其与文中提到的三种常用的阴影检测算法进行了对比,检测结果如图4所示。从图4中可以明显看出文中所提出的方法不仅可以检测到大部门的阴影区域(包括阴影边缘),还可以防止目标部分被误检为阴影,与传统的三种阴影检测方法相比有着方便性和更强的适应性。
4 结论
文中首先采用改进的混合高斯运动检测算法来对运动目标进行检测;然后提取出阴影像素点的特征,并通过ELM来对其特征进行学习,从而来对检测得到的前景像素进行分类,得到真正的阴影像素;最后仿真实验表明文中提出的方法不仅操作简单而且取得了比常规方法更好的效果。相对于传统相方法,这一方法的主要优点有:1、不需要人工设置阈值;2、实现方法简单,实时性好;3、适用范围广。由于文中提出的方法是基于训练的,因此如果换了一个和之前样本相差较大的场景则可能需要重新训练。如何提取出更加有独立的特征,从而使得特征具有通用性是接下来将要进行深入研究的一个问题。

图4 阴影检测结果比较
[1]张玲,程义民,谢于明,等.基于局部二元图的视频对象阴影检测方法[J].系统工程与电子技术,2007,29(6):974-977.
[2]史波,王红.一种自学习阴影检测方法[J].计算机应用研究,2012,29(5):1983-1986.
[3]王彬,冯远静,郭海峰,张贵军.交通场景中车辆的运动检测与阴影消除[J].中国图像图形学报,2012,17(11):1391-1399.
[4]姜柯,李艾华,苏延召.结合边缘纹理和抽样推断的自适应阴影检测算法[J].西安交通大学学报,2013,47(2):39-46.
[5]ANDRES SANIN,CONRAD SANDERSON,BRIAN C LOVELL.Shadow detection:a survey and comparative evaluation of recent methods[J].Kidlington Oxford United Kingdom,2012,45(4):1684-1695.
[6]查宇飞,楚瀛,王勋,等.一种基于Boosting判别模型的运动阴影检测方法[J].计算机学报,2007,8(7):1295-1301.
[7]RUIQI GUO,QIEYUN DAI,D.HOIEM.Single-image shadow detection and removal using paired regions[J].2011 IEEE Conference on Computer Vision and Pattern Recognition,2011:2033-2040.
[8]JEAN-FRANCOIS LALONDE,Alexei A.Efros,and Srinivasa G.Narasimhan.Detecting Ground Shadows in Outdoor Consumer Photo⁃graphs[C].European Conference on Computer Vision,2010.322-335.
[9]王晓东,霍红,方涛.基于快速归一化互相关函数的运动车辆阴影检测算法[J].计算机应用,2006,26(9):2065-2067.
[10]Julio Cezar Silveira Jacques Jr.,Cláudio Rosito Jung.Soraia Raupp Musse.Background Subtraction and Shadow Detection in Gray⁃scale Video Sequences[J].Graphics Patterns and Images SIBGRAPI Conference,2005:189-196.
[11]张露,闭金杰,林志源,等.基于颜色特征的图像提取算法的研究[J].科技创新导报,2008,153(33):189.
(责任编辑:潘修强)
The Model of Moving Shadow Detection Based on Extreme Learning Machine
MAWu-xi,CHEN Yu-meng,ZHENG Li-xiao
(Zhejiang Industry&Trade Vocational College,Wenzhou,325003,China)
In the system of intelligent traffic,the shadow of moving cars cause terrible detection of targets,therefore,a kind of method about shadow detection based on mixed gauss model algorithm and extreme learning machine is proposed.This method only needs to extract the gradient and variance of neighbourhood about pixels,and classifies pixels using the extreme learning machine, without setting any empirical threshold.Finally,compared with the traditional method,the experimental results show that the method proposed is not only simple,but also can accurately detect the inside shadow area and the edge of shadow.
moving test;background modeling;extreme learning machine;shadow detection;normalized cross-correlation
TP391.413
A
1672-0105(2014)03-0026-04
10.3969/j.issn.1672-0105.2014.03.008
2014-07-08
马无锡(1984—),男,浙江温州人,助理工程师,硕士,研究方向为:数字图像处理;陈欲勐(1977—)男,浙江温州人,讲师,硕士,研究方向:图形图像,移动互联网应用;郑莉晓(1978—),女,浙江永嘉人,助理研究员,硕士,研究方向为:教育心理学。