一种基于无源射频识别标签的消防员室内定位系统
2014-01-16施连兴
施连兴
(龙岩市公安消防支队 福建 龙岩 364021)
近年来伴随着大空间、超高层和综合性大型建筑物数量的增长,其火灾所带来的损失和影响越来越大。大型建筑物内特别是人员密集型住宅楼、办公楼、厂房、商业中心等建筑物内,一旦由于施工、用火、用电、燃气使用不当等意外情况发生火灾时,由于楼层多、通道分布复杂等原因,遇险人员的救援难度很大。当大型建筑物内发生火灾时,很难在建筑物外部将火灾扑灭,在很多情况下需要消防员进入建筑物内部才能完全控制火情并实施人员搜救工作。现阶段,当消防员进入建筑物内之后,在能见度很差的环境中,依靠现有技术手段如视频监控系统等,建筑物外部的指挥员很难对建筑物内的消防员进行实时定位,缺乏有效的室内定位手段会影响消防员搜救人员的效率,甚至消防员也不能准确判断自身的位置。因此,在缺乏有效的室内定位系统的情况下,将会对火情控制和人员搜救工作带来很多的不便,甚至威胁到消防员的生命安全。
近年来,随着无线移动通信技术的快速发展,GPS和蜂窝网络相结合的A-GPS(Assisted Global Positioning System)定位方式[1]在紧急救援和各种基于位置服务(LBS,Location-Based Services)中逐渐得到了应用。现有室内无线定位系统主要采用红外、超声波[2]、蓝牙、WiFi(Wireless Fidelity)、RFID(Radio Frequency Identification)等短距离无线技术。还有基于WiFi网络的无线定位技术由于部署广泛且低成本较低,因此备受关[3-4]。
文献[5]提出了一种基于地理信息系统(GIS)和射频识别技术 (RFID)的火场消防救援人员和设备跟踪定位监控系统,该系统中消防员与消防救援设备上布置了RFID标签,建筑物内的关键位置,如消防通道、每个楼层的走廊内、以及主要出入口、电梯井等,每隔一定距离会安装布置一个读写器,用于监控消防救援人员或监控调派消防救援设备。该系统的主要不足在于,RFID读写器的安装密度决定了该系统的定位精度,过于密集的安装RFID读写器,又会使得系统成本上升。文献[6]回顾了国内外面向遇险消防员定位技术已取得的研究成果,分析了各类定位技术(包括基于无线信号强度的测距与测向、基于ZigBee或UWB的主动RFID标签的定位)的优缺点。应用主动RFID标签的室内定位系统,定位精度高,但部署成本高,且无法长期部署,目前尚无应用实例,而基于无线信号强度的测距与测向系统,系统简单成本低,但定位精度不高。
本文提出了一种基于无源RFID标签的消防员室内定位系统,与已有基于RFID标签实现室内定位的系统主要不同之处在于,该系统所使用无源RFID标签采用线极化天线并被部署在建筑物内部,消防员头盔上则安装了一种可变功率和使用双极化天线的RFID读写器,此外,头盔中还集成了方向传感器模块可以感知消防员的当前行进方向信息。通过读取消防员所在位置附近的建筑物内部署的RFID标签信息,并将RFID标签信息连同当前行进方向信息一道通过3G网络转发到服务器,服务器通过对传回的RFID标签信息和行进方向信息进行计算,可以得出消防员的实时室内位置,建筑物外部的指挥员便可通过查询服务器得知消防员的实时室内位置,实现人员精准定位和指挥。根据该方法实现的室内定位系统,部署和使用较为方便,且具有系统成本低、定位精度高和标签可在建筑物内长期部署等优点。
1 基于射频识别标签的室内定位系统
1.1 系统组成及RFID标签与读写器的设计
基于射频识别标签的消防员室内定位系统组成示意图如图1所示,需要事先在建筑物内部署好具有不同安装方向的无源RFID标签,本系统所采用的RFID标签的天线要求是线极化的,并在消防员的头盔中集成了可变功率的读写器和远程数据通信模块,系统的具体实现如下所述。
预先在大型建筑物内人员有可能到达的区域,如消防通道、主要出入口、楼梯电梯等位置,布置好无源RFID标签,标签内存储了该标签的全球唯一识别码信息 (简称ID信息),并在建筑物的二维楼层分布图或三维设计图纸中标定每个RFID标签的室内位置坐标 (二维或三维)及其安装方向信息。安装RFID标签时,标签的方向可以按一定规律循环设定,如0-45-90-135度放置。这些RFID标签的安装位置信息与安装方向信息,均可存储于远程服务器。
消防员进入建筑物内部时佩戴的头盔中安装有RFID读写器、远程数据通信模块和电源模块等,RFID读写器的组成示意图如图2所示。当消防员(可以是一名或者一组)经过RFID标签附近时,读写器会激活标签并读取RFID标签内的ID信息,读写器内集成了功率控制模块,可实现功率的多级调节,即可读取到不同距离内的RFID标签ID信息。首先,头盔中的远程数据通信模块可通过移动通信运营商的3G网络,将读取的RFID标签ID信息上传到远程指定服务器。其次,由于本系统采用的RFID读写器的天线采用双极化天线设计,换言之,本系统的RFID读写器可以读取两个正交极化方向上的接收信号幅度信息 (简称正交极化幅度信息),因此,通信模块可以将读取到的正交极化幅度信息也上传到远程指定服务器。最后,RFID读写器中的方向传感器模块,可获取消防员当前的行进方向,通信模块也需要将该角度值信息上传到远程指定服务器。
远程服务器收到头盔发送的RFID标签ID信息、正交极化幅度信息和行进方向信息之后,通过执行定位算法可获取RFID读写器所在的室内位置坐标(二维或三维),即可获知佩戴该头盔的消防员对应的室内位置坐标。由于本系统使用了线极化的RFID标签天线,RFID阅读器采用了可变功率和双极化天线的设计,再加上可以实时获取被定位目标的行进信息,与一般的仅基于信号强度的室内定位系统相比,本系统的定位精度更高,消防员的室内定位精度可以精确到2~3 m。具体的定位算法实现,见1.2节。
建筑物外部的指挥员通过授权的移动手持终端,如平板电脑、智能手机、笔记本电脑等,请求读取远程服务器上的RFID阅读器或者头盔的位置信息,即可实时了解建筑内部所有消防员的位置,并发出相应指令,提高消防灭火和救援的效率,并保证消防员的人身安全。

图1 基于无源射频识别标签的消防员室内定位系统组成示意图Fig.1 Illustration of passive RFID tag based fireman indoor positioning system
1.2 室内定位原理与实现
如图2所示,消防员头盔中的RFID读写器主要包含基带处理器、射频及中频电路、双极化天线、功率控制模块和方向传感器模块等。其中,基带处理器负责将天线接收的信号进行解调,输出ID信息。采用双极化天线可接收RFID标签在两个正交极化方向上的信号,因此可在基带处理电路部分获得正交极化幅度信息。方向传感器模块由磁力计、陀螺仪等构建而成,可计算得出消防员当前的行进方向信息。在功率控制模块的控制下,RFID读写器周期性的以设定的功率水平变化规律(例如,从最低功率逐级增加到最高功率后再返回最低功率,如此循环执行下去),将读取到的一个或多个RFID标签ID信息及其正交极化幅度信息,连同消防员当前行进方向信息一起,通过远程数据通信模块发送到远程服务器。

图2 射频识别标签读写器的组成示意图Fig.2 Illustration of RFID reader
远程服务器主要负责定位算法的实现,定位的基本原理是将接收到的RFID标签正交极化幅度信息向量 (在不同功率水平下的特定ID所对应的正交极化幅度信息),与预先存储的RFID标签正交极化幅度信息向量进行相关运算,选择相关值最大者所对应的位置坐标作为定位结果。
使用系统前需进行测量校准,一个测量校准的例子如图3所示。在这个例子中,测量人员所在楼层的待测区域内共有20个RFID标签,RFID标签共有4个安装方向,安装时尽可能使标签的安装方向随机化。国标规定,900 MHz频段的无源RFID标签的读写器(天线+模块)的最大输出功率是30 dBm,实际使用中的经验结果是,标签的最大读取距离在10 m左右。
测量时,测量人员戴着具有RFID读写器的头盔,对于每一个系统可测量的位置坐标(二维或三维),设测量人员的当前行进方向为0°,记录在使用不同功率时RFID读写器所能解调出的标签ID信息(记作T),及其双极化天线所接收到的正交极化幅度值的平方根(记作RSSI),未能读取到的RFID标签,RSSI值相应的记作0。假定RFID读写器共有N个功率水平,从小到大依次为P1,P2,…,PN。例如,当读写器使用最小功率P1时,能接收到4个RFID标签的信息,则记录如下的向量:
[(T11, 0, 0,), … , (T32, RSSI1, RSSI2), (T33,RSSI1, RSSI2), …, (T42, RSSI1, RSSI2), (T43, RSSI1,RSSI2), …, (T54, 0, 0)]
当读写器使用最大功率PN时,能解调出全部20个标签的信息,则记录如下的向量:
[(T11, RSSI1, RSSI2), (T12, RSSI1, RSSI2), … ,(T53, RSSI1, RSSI2), (T54, RSSI1, RSSI2)]
在每个功率水平设定下,记向量中所有RSSI1的平均值为R1,所有RSSI2的平均值为R2,对上述每个向量进行如下处理:
令 RSSI1’=RSSI1╞ R1,RSSI2’=RSSI2╞ R2。
最后,将上述每个向量中的RSSI1和RSSI2都替换成RSSI1’和RSSI2’,即得到了不同功率水平设定下的校准向量:
[(T11, RSSI1’, RSSI2’), (T12, RSSI1’, RSSI2’), …,(T53, RSSI1’, RSSI2’), (T54, RSSI1’, RSSI2’)]
至此,测量校准工作完毕。
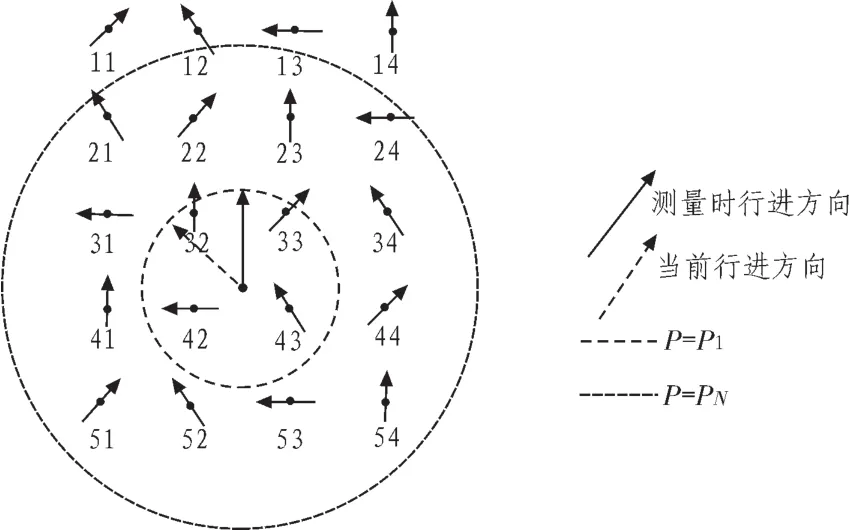
图3 射频识别标签的安装方向、读写器功率控制与行进方向示意图Fig.3 Illustrations of RFID tag installation orientation, reader’s power control,and heading direction
在实际使用该系统时,设消防员当前行进方向与测量人员行进方向的夹角为θ°(0≤θ≤90),在当前功率水平设定下,对读写器所能读取到的RFID标签,把其所对应的双极化天线所接收到的正交极化幅度值的平方根,记作rssi1与rssi2,在定位运算前,需要进行如下预处理:
r1=rssi1*cosθ +rssi2*sinθ
r2=rssi1*sinθ +rssi2*cosθ
由此可以获得在不同功率水平设定下的测量向量:
[(T11, r1, r2), (T12, r1, r2), … , (T53, r1, r2),(T54, r1, r2)]
将测量向量与校准向量进行相关运算,相关值最大者所对应的校准向量的位置坐标即作为定位结果。一般情况下,系统会优先选择功率较小设定下的定位结果,但当较小功率下没有读取到RFID标签时,则选择较大功率设定下的定位结果。
2 结 论
本文提出了一种基于无源RFID标签的消防员室内定位系统,系统的主要特点是:使用无源RFID标签并采用线极化天线,在消防员头盔中安装了一种可变功率的RFID读写器并使用双极化天线,头盔中还集成了方向传感器模块可以感知消防员的行进方向信息。本文提出的消防员室内定位系统,部署和使用较为方便,且具有系统成本低、定位精度高和标签可在建筑物内长期部署等优点。
[1]Veljo Otsason.Accurate Indoor Localization Using Wide GSM Fingerprinting [D].Tartu:Institute of Computer Science, University of Tartu,2005.
[2]韩霜,罗海勇,陈颖,等.基于TDOA的超声波室内定位系统的设计与实现[J].传感技术学报,2010,23(3):347-353.HAN Shuang,LUO Hai-yong,CHEN Yin,et al。 The design and implementation of a TDOA-based ultrasonic indoor localizing system [J].Chinese journal of sensors and actuators,2010,23(3):347-353.
[3]Paramvir Bahl,Venkata N.Padmanabhan.RADAR:An In-Building RF-based User Location Tracking System[C]//TelAviv:IEEE infocom,2000:774-784.
[4]Kamol Kaemarungsi.Design of Indoor Positioning Systems Based on Location Fingerprinting Technique[D].Pittsburgh:School of Information Science.University of Pittsburgh,2005.
[5]邵宇,谢锋.基于GIS和RFID的火场消防救援人员和设备跟踪定位监控系统的设计[J].科技成果纵横,2009(5):59-60.SHAO Yu,XIE Feng.Design of GIS and RFID-based firemen rescue and equipment tracking monitoring system on the fire[J].Perspectives of Scientific and Technological Achievement,2009(5):59-60.
[6]宋娜娜,胡斌.灾害现场遇险消防员定位技术研究现状[C]//自主创新与持续增长第十一届中国科协年会论文集,2009:144.