室内雕塑点云三维重构
2014-01-16香玫元艾海滨
香玫元,李 赟,艾海滨,张 力
(1.兰州交通大学,兰州 730070;2.中国测绘科学研究院,北京 100830)
1 引言
目前,室内三维导航定位正在迅速的发展,三维模型对于室内三维导航定位有着至关重要的作用,直接影响着用户使用体验感,而其中一些场景往往含有雕塑,如博物馆、大型商场等。室内雕塑的三维建模是一项费时费力的工作,常用的方法是用三维构建软件(如3ds max,Maya等),由人工手动构建,这不仅非常耗时,并且大大提高了成本。所以,室内雕塑三维模型构建急切需要一种自动建模方法。在此领域,国内外研究者提出了多种三维建模的方法。文献[1]针对当前常用的计算机建筑建模方法,对三维(3D)建模技术和建模方法作了系统、全面、深入的分析。文献[2]利用三维激光扫描技术进行建筑物室内外一体建模方法研究,为室内外场景三维重建提供了有效方法。文献[3]利用三维激光点云数据和图像信息来实现对室内场景的三维重建,为未知环境下的移动机器人导航提供辅助。本文利用已有的离散点云数据,对其预处理,然后进行三维模型构建,可以快速得到雕塑三维几何模型。
2 点云数据的预处理
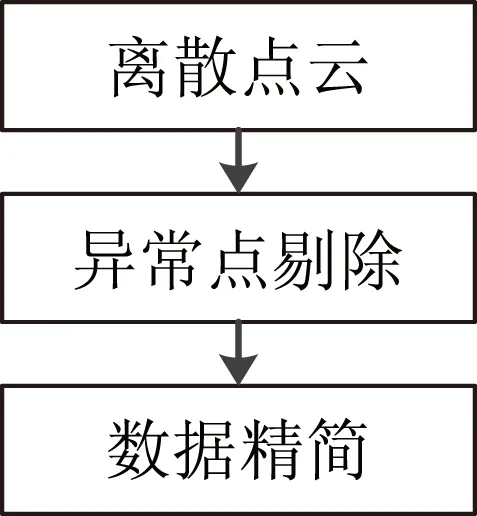
图1 数据预 处理流程
由于使用不同的测量方法,测量设备存在缺陷,获得到的点云数据通常不可避免地存在一些问题,包括噪声点的产生、数据失真和数据冗余等问题。带有许多杂点、噪声点的点云数据会影响后续的曲面重构过程,就需要进行异常点剔除;另外,各种测量方法的速度不断加快,效率不断提高,测量产生的点云数据量往往非常庞大,所以需要进行数据精简。因此,在曲面重构前,需要对点云进行一些必要的处理,以获得满意的数据,即点云预处理。主要包括:异常点剔除、数据精简。预处理流程如图1所示。
2.1 异常点剔除
点云数据上的异常点,可能使该点及其周围的曲面片偏离原曲面,使得重构获得的几何模型与物体的真实模型不一致,所以必须对原始点云数据进行预处理,以剔除异常点。不同测量方式得到的点云数据的呈现方式各不相同,根据点云中点的分布特征将点云分为:散乱 点云、扫描线点云、网格化点云。实际工程中常用的是散乱点云和扫描线点云,本文中使用的数据为离散点云数据。找出并剔除异常点的判断方法主要是:首先计算所有点云到他们的k最近邻的平均平方距离,然后根据计算到的平均平方距离对点云进行升序排列,最后剔除其中最大值的点。异常点剔除效果如图2所示。
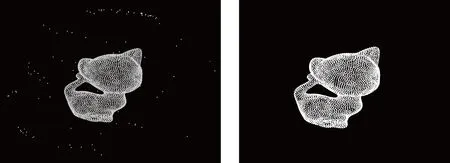
图2 原模型(左图)与经过异常点剔除后的模型(右图)
2.2 数据精简
通常在数据测量时,为了尽可能地获得更多的表面细节,最终得到的点云数据通常数据量较大,并且可能存在大量的冗余。为了提高曲面重建的效率和质量,需要按一定的要求减少点云的数量,即进行数据精简。本文中首先使用体包围盒来约束点云,然后将体包围盒分解成若干个大小相等的小包围盒,最后在每个小包围盒中选取最靠近包围盒中心的点来代替整个包围盒中的点。数据精简效果如图3所示。

图3 原模型(左图)与经过数据精简后的模型(右图)
3 三维模型重构
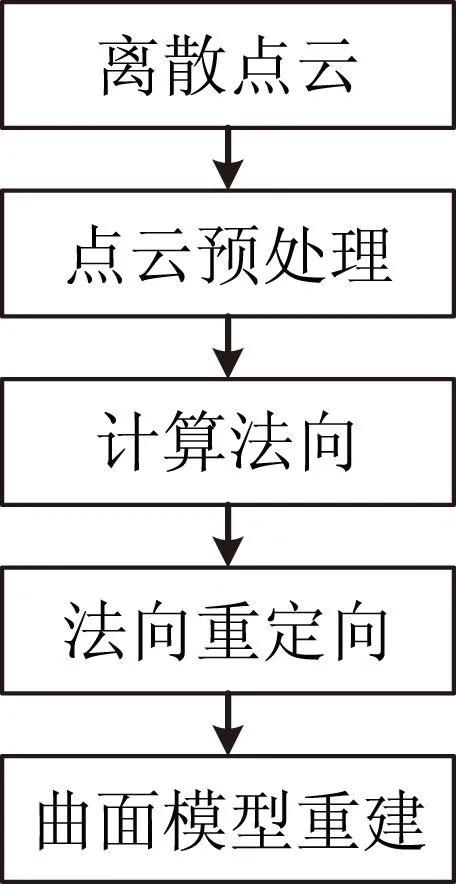
图4 三维模型 重建流程
三维模型的曲面重建是几何造型中的一个重要研究领域。曲面重建的是为了恢复实物模型的曲面形状,并且使得模型的形状尽可能地反映现实实物的形状特征。根据重建曲面的表现形式不同,可以将曲面重建方法分为参数曲面重建、多面体网格重建、细分曲面重建和隐式曲面重建等。本文选用的是隐式曲面重建中的泊松曲面重建方法[4]。泊松曲面重建方法的优点是抗噪性好,受非均匀采样影响小,重建结果光滑,并可以控制结果的光滑与精细程度。泊松曲面重建方法需要知道点数据的法方,所以在曲面重构前需要计算法向,并对法向重定向尽可能地确保法向的正确。三维模型重建流程如图4所示。
3.1 法向估计
点的法向是泊松曲面重建必不可少的信息。点云法向估计的可靠性对于曲面重建质量很重要。点云法向估计越可靠,曲面重建质量越高。目前已有的法向估算方法可分为基于 Delaunay/Voronoi划分的方法、基于局部表面拟合的计算方法和基于鲁棒统计的方法。其中基于局部表面拟合的计算方法主要是主元分析(principal component analysis,PCA)估算方法[5],以及在PCA基础上的一些改进方法。本文中估算点法向采用PCA估算方法。
PCA原理为:假定点集Np是点p的邻域点集,其3×3协方差矩阵C定义为:
(1)

C·νI=λI·νI,I∈{0,1,2}
(2)
协方差矩阵是一个矩阵,其每个元素是各个向量元素之间的协方差。协方差矩阵C是对称半正定矩阵,所以特征值λI是实数,并且特征向量νI形成一个正交坐标系,与由Np定义的点集的元主成分一致。
λI表示pi,i∈Np沿与λI相应的特征向量方向的方差大小。这样就可以计算出总方差值,也就是pi到它们的重心之间的距离平方和,可表示如下:
(3)
假设λ0≤λ1≤λ2,满足这样一个平面
(4)

这样,协方差矩阵C最小特征值的特征向量可被作为点p的法向量。通过这种方法就能够得到所有点的法向量。
3.2 法向重定向
求出每个点的法向量之后,还需要对法向量的方向进行调整,使得所有法向量都指向模型的外侧。因为在泊松曲面重建中法向量本身的精确度并不是很重要,重要的是通过法向量的方向来区分模型的内侧和外侧。
算法中认为每个点和它的最近邻的法向量方向差别不大,所以它们的法向量内积应该是大于0的。这样就可以通过判断一个点的法向量和它的最近邻的法向量方向内积是否大于0决定是否应当调整它的法向量的方向。
具体实现的方法就是先找到图形的最低最左点,容易看出这一点的法向量应当指向Z坐标为负的方向。这一点的法向量方向调整好以后,就可以对所有的点建一棵最小生成树,以最低最左点为根深度优先地遍历整棵树,并根据每个顶点在树中的父节点调整其法向量的方向。通过这样的调整,就可以得到在全局意义上一致的法向量。
3.3 曲面重建
室内雕塑点云模型往往对重建结果的准确性及细节方面要求很高。泊松重建方法作为一种经典的隐式重建方法,在已知点云精确法向量的基础上,能高效处理上述问题,同时能生成不同表示层次上的模型,满足室内导航中精细模型的要求。泊松重建主要是通过对点云数据进行最优化的插值处理来获得近似曲面。

首先需要定义梯度场。由于梯度函数是一个分段常函数,其函数值发生了突变,对梯度场的显式计算会导致在曲面边界处产生无穷大的情况。为了处理这种情况,需要用指示函数和一个平滑滤波函数进行卷积,然后考虑平滑后的梯度场。
然后需要估计向量场。因为不知道模型表面的几何特征,不能近似地计算模型的曲面积分。输入的带法向的有向点集提供了精确的信息,可以通过离散求和来近似计算模型的曲面积分。根据点集S把∂M分割成不同的小面片Ps⊂∂M,则可以根据点s.p的值与小面片的面积的乘积来近似计算小面片上的积分:

(5)
最后将三维重建的问题转化为求解泊松方程。
4 实验结果与分析
针对上述方法,对两组数据进行三维重构,以下给出具体的实验结果。表1列出了在重构过程中的一些相关数据,计算时间是从读入原始点数开始,经过预处理后生成三维模型的时间。从表1的结果可以看出采用泊松曲面重建方法对离散点云数据的重建可以得到较好的结果,所耗费的时间都不是很大。图5是对大量数据点集猫的重构结果,图6对大量数据点集狮子的重构结果。从得到的结果可以看出:泊松曲面重建方法虽然使得有些细节表现不够细致,但是能很好的拟合模型表面,并且在离开表面处不会形成其它错假面片,得到的重构模型表面的光顺性很好。

表1 试验相关数据

图5 猫的模型
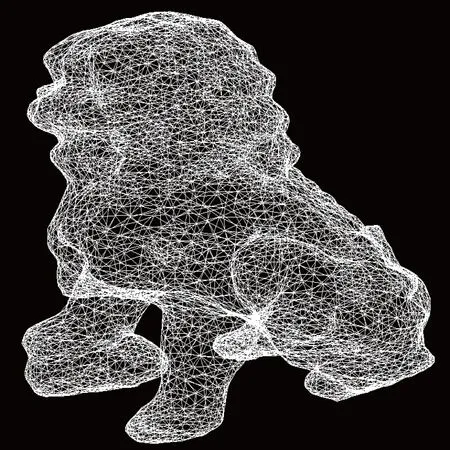
图6 狮子的模型
5 结论
结合已有离散点云数据,给出了一种从点云数据到三维几何模型的方法。实验表明本文的方法建模速度快,表面能够很好的拟合,异常点对建模影响较小,得到的重构模型表面的光顺性很好,可以满足室内模型的生成。但是还存在一些问题有待解决:方法对于模型表面的一些细节处理的不够理想;模型边缘过于平滑;重构后的模型还需要进一步优化。
[1] 雷鸿源,陈炽坤,王高.建筑室内计算机建模方法的探讨[J].工程图学学报,2005(5):23-28.
[2] 杨林,盛业华,王波.利用三维激光扫描技术进行建筑物室内外一体建模方法研究[J].测绘通报,2014(7):27-30.
[3] 张勤,贾庆轩.基于激光与单目视觉的室内场景三维重建[J].系统仿真学报,2014,26(2):357-362.
[4] KAZHDAN M,BOLITHO M,HOPPE H.Poisson Surface Reconstruction[EL/OL].[2014-08-10].http://web.cs.jhu.edu/~bolitho/Research/PoissonSurfaceReconstruction/PoissonRecon.pdf.
[5] SANGVERAPHUNSIRI V,SRITRAKULCHAI K.The Development of a Technique for 3D Complex Surface Reconstruction from Unorganized Point Cloud[J].The International Journal of Advanced Manufacturing Technology,2007,33(7):772-781.
[6] PUALY M.Point Primitives for Inteacrtive Modeling and Proeessing of 3D Geometry[D].Zurich:Federal Institute of Technology(ETH) of Zurich, 2003.
[7] 路兴昌,宫辉力,赵文吉,等.基于激光扫描数据的三维可视化建模[J].系统仿真学报,2007,19(7):1624-1629.
[8] 白成军,吴葱.文物建筑测绘中三维激光扫描技术的核心问题研究[J].测绘通报,2012(1):36-38.
[9] 邓志东,牛建军,张竞丹.基于立体视觉的三维建模方法[J].系统仿真学报,2007,19(14):3258-3262+3289.
[10] 周儒荣,张丽艳,苏旭,等.海量散乱点的曲面重建算法研究[ J].软件学报,2001,12(2):249-255.