面向位置服务的室内空间模型研究进展
2014-01-16宋国民贾奋励
林 雕,宋国民,贾奋励
(信息工程大学 地理空间信息学院,郑州 450052)
1 引言
近年来,国际位置服务领域的研究热点已从室外延伸到室内,我国“导航与位置服务科技发展十二五规划”也明确提出了发展室内外协同实时高精度定位和全息导航地图,以解决目前位置服务存在的“最后一千米”问题。室内位置服务需要解决的一个关键性问题就是室内空间建模,目前研究人员已提出了多种室内空间模型,但通常都只针对某一特定的应用,很难有一个适合于所有应用的通用室内空间模型。文献[1]从普适计算的角度对室内空间模型作了综述,文献[2]则侧重于情境感知的角度对几何和符号两类空间模型进行了比较分析,文献[3-4]也对室内空间模型作了分类比较,但尚无专门从位置服务角度对室内空间模型的综述,本文以室内位置服务应用为背景,依据模型的构造特点对典型室内空间模型进行分类剖析,详细介绍各类模型的建模原理及优缺点,为开展面向室内位置服务的空间建模研究提供借鉴。首先,阐述了室内空间的特点和主要的室内位置服务模式;然后,根据模型的构造特点,将现有空间模型划分为几何、符号、语义3类,并对其中的典型成果进行了分析和评述;最后,讨论了现有建模方法面临的主要问题,并展望了室内空间建模研究的发展趋势。
2 室内空间及其位置服务
2.1 室内空间特点
室内空间可以被非正式的定义为人们所活动的建筑环境(例如房间、会议室等)[5]。与室外空间相比,室内空间具有其独特性。主要表现在:
(1)室内外空间尺度不同。室内空间整体与室外空间相比是微观的空间,室内空间通常被认为是小尺度的感知空间[6]。不同空间尺度上,人类对于空间有着不同的理解能力和表达方式。因此,室内空间建模需充分考虑室内的认知特点。例如,室内情况下通常使用更加符合用户认知习惯的符号化位置描述(如:302房间)。又如,室内空间的定向更加困难,“东南西北”的定向方式在室内已不再适用,复杂的室内空间构造容易使用户转向,特别是在跨楼层的移动情况下。
(2)室内外空间组成要素不同。室内空间没有自然要素,都是人工设施[6],各类构件繁多且功能各异。因此,室内外空间模型所需要表达内容有所不同。室内空间模型需重点描述门、窗、楼梯、通道等室内构件,具体的模型抽象方式和所针对的应用相关。
(3)室内外空间约束有所不同。室内空间中没有类似于室外路网那样明确的路径信息,用户在室内的移动具有更大的随意性,但同时室内的移动又受到门、房间、走廊、楼梯等建筑物构件的限制[3]。因此,用户的室内外移动习惯有所不同,在建模过程中应将其纳入考虑。例如,在房间内部人们一般习惯从一个门径直走到另一个可通视的门[7]。
2.2 典型室内位置服务模式
现有的室内空间模型主要应用于机器人导航、地理信息系统(geographic information system,GIS)、普适计算等领域[2]。不同应用领域对建模要求不同。本文重点关注面向位置服务的室内空间模型。目前,室内空间模型的位置服务模式主要有以下五种[1-2]:
位置查询:提供移动或静止的空间实体位置信息。它是实现其它相关位置服务的基础,没有位置信息的支持,其它的位置服务则无法实现。
导航:根据用户提出的要求查找符合条件的兴趣点并提供到达该点的相关路径信息。常见的导航任务是提供一条到达指定地点的最短或最省时的路径。
范围查询:用于查找一个用户指定范围或区域内空间实体的相关信息。常见的应用就是信息推送,如向指定范围内的人群推送广告信息。
最邻近查询:根据要求,查找n个距离指定位置最近的空间实体信息。例如,一个用户可以搜索距他当前位置最近的餐馆信息。
可视化:通常以地图的形式实现,制图是空间模型最显著的应用之一,一般来说,前文所提的导航、范围查询等均需借助地图来实现。地图的绘制则需要在空间实体的几何信息支持下完成。
综合考虑室内空间自身特性与室内位置服务的应用需求可知,传统的室外空间模型已不能完全适用于室内位置服务,例如,室内的位置描述、路网构建和室外均有所不同,需结合室内空间特点探讨适合室内位置服务的空间模型。
3 面向室内位置服务的空间模型
目前,国内外已提出了众多的室内空间模型,研究者们从不同的角度提出了多种分类方式,其中,文献V[1-2]将其分类为几何模型和符号模型两类,二者分别从普世计算和情境感知的角度对这两类模型作了进一步的分析,文献[3]则按照空间模型描述对象的不同,将其分为对象特征模型、几何模型以及符号模型三类,文献[4]中则提出可将当前空间模型粗略区分为语义模型、拓扑模型、几何模型、混合模型四类。不同分类方式各有其优缺点,侧重点也有所不同,本文在参照已有模型分类方法的基础上,从面向位置服务的角度出发,根据模型的构造特点将其大致分为几何空间模型、符号空间模型、语义空间模型三类。
3.1 几何模型
几何空间模型通常是对室内实体做一个几何的描述,它以坐标的形式为模型提供精确的几何信息。依据表示形式不同分为基于边界的模型和基于格网的模型两类。
3.1.1 基于边界的模型
基于边界的模型将室内实体通过欧式空间的点、线、面、体来描述,每个空间实体表示为一个坐标集。传统的计算机辅助设计(computer aided design,CAD)室内平面图是目前最为常见的一类室内几何模型,一般用于建筑工程领域,包含有诸多室内构件的几何信息。另外,由国际协同联盟(international alliance for interoperability,IAI)提出的工业基础类(industry foundation class,IFC)数据模型标准作为建筑信息模型的一个主要数据交换标准,采用了实体模型的表达机制来描述室内构建几何信息,主要用于建筑工程管理。城市地理标记语言(city geography markup language,CityGML)的多细节层次4(levels of detail 4,LOD4)则是由开放地理信息联盟提出的室内3维空间数据模型,相比较IFC模型而言更加接近于GIS的应用,采用了表面模型的3维几何模型表达机制,主要用于对室内空间的可视化。
尽管边界模型能够提供丰富的室内几何数据,但一般不能将其直接用于导航、范围查询等室内位置服务。目前,主要将其用作其他空间模型的数据源。例如,文献[8]基于CAD室内模型构建了室内拓扑模型,并将其应用于导航;文献[9]在IFC的基础下,提取实体边界信息并将其格网化到2维平面实现了室内的路径规划。
3.1.2 基于格网的模型
基于格网的空间模型通过对室内空间的格网分割实现。包括有规则格网分割和不规则格网分割。其中规则分割将空间用形状和大小相同的几何图形进行分割,常见的有正方形和六角形分割。这种分割方式广泛的应用于机器人导航领域它提供了一个具有连续几何特性的空间模型,并支持不同类型的基于几何的空间查询和格网交互。另外,还可在格网分割的基础下建立基于格网的图模型,用于路径导航和空间分析。文献[10]提出的2维室内空间格网图模型,不仅能够表示空间几何信息,也可表示空间的结构属性和不同抽象层次的拓扑关系,还可以用于室内寻路和扩散分析。一般来说,格网分割越细模型的几何精度越高,但存在的问题就是格网越多所占的内存越大,查询和服务效率则会相对降低。不规则格网空间分割则是根据相应的原则将空间分割成不规则的多边形,常见的有三角格分割、Voronoi多边形分割等,常用于室内的壁障导航。文献[11]提出了一种对室内空间的三角格网划分,通过构建基于三角格网的图模型实现了高效的壁障路径查询,但是该模型适用范围有限不能够直接支持范围查询、最邻近查询等位置服务。另一类基于Voronoi多边形分割的空间模型被广泛的用于诸多领域,文献[12]提出了一个分级的基于Voronoi多边形的路径图模型构建方法,并将其应用于室内导航和路径描述,然而这种模型的构建和维护并不容易,目前也不能实现Voronoi多边形的自动构建。
相对于规则格网而言,不规则格网空间分割更加的灵活,室内寻路的效率要高于规则格网,存在的问题就是模型构造依赖于具体的空间分割算法,建模过程比较繁琐,且不能提供高精度的位置信息。
3.2 符号模型
符号模型将室内空间的所有对象表示为带有特定ID标记的符号元素,一般用于描述对象之间的拓扑关系,主要包括基于集合的模型和基于图的模型。
3.2.1 基于集合的模型
基于集合的模型首先给空间或实体一个符号标识,然后依据空间之间的包含关系将不同空间标识组成集合和子集,建立一个分级的空间模型。例如,一个超市被定义为一个楼层编号的集合,每一个楼层都有一个与之关联的子集,每个子集中包括该楼层内所有的房间编号。其中具有代表性的就是文献[13]所提的基于集合的语义拓扑模型,该模型描述了空间之间的包含与连通关系,并可用于室内位置查询,主要缺点在于缺少对空间几何信息的描述。另外,这种树状结构模型不允许一个元素同时继承于多个父类,例如,一个房间可包含于某个楼层中,也可以包含于建筑物的一个侧翼,基于概念格的模型则很好的解决了子类空间的多元继承问题。图1表示了一个示例的基于概念格的空间模型,图1(a)表示该建筑物B的组成部分包括有楼层F1和F2以及两个侧翼W1和W2,该区域内共有R1到R5五个房间。图1(b)则是图1(a)所对应的基于概念格的集合模型,该模型中的空间区域可以通过多个空间标识的集合加以表示,重叠的空间区域则被定义为两个集合之间的交集,其中编号为FiWj的空间表示楼层Fi与侧翼Wj的交叉空间。文献[14]提出了基于“位置·出口”的概念格空间模型,将室内抽象成位置和出口两类对象,并基于概念格理论建立了空间的连接关系,该模型可以用于室内的最邻近查询和语义室内导航。
基于集合的模型可用于支持室内范围查询、最邻近查询、导航等位置服务,但通常情况下该模型只是对空间的定性描述,缺少坐标、距离等定量信息,难以满足高精度的位置查询、路径导航等位置服务需求。
3.2.2 基于图的模型
基于图的模型将室内空间表示为一个图G=(V,E),其中V(vertices)表示预先定义好的位置(如:某个场所或是某个兴趣点),E(edge)表示两个位置之间可通行的直接连接关系。图2所描述的是一类最简单的室内图模型,它将房间和通道等空间抽象为节点,将连接房间与通道的门抽象为边,该模型明确表示了空间的连通关系,可直接用于室内最邻近查询,给节点和边赋权值后还可用于室内的导航和范围查询。单纯的图模型只能表示空间的拓扑关系,缺少距离等几何信息。针对该问题,文献[15]提出了室内3维网络模型实现了几何信息和拓扑信息的统一表达,模型主要构建原理是通过对偶图的方法将3维空间实体(如房间)转换成0维的点,将2维的面转换成1维的线从而构建一个可表示空间拓扑关系的2维图模型,并通过中轴变换的方法提取多边形的线性特征来获取2维图的几何信息(如图3所示)。几何图的建模方法广泛的应用于室内导航[16-19]。根据空间抽象方式的不同,可进一步将其分为“房间·房间”图模型[8,20]和“门·门”图模型[21-23]两类,其中房间图模型将房间抽象表示为节点,房间之间的门表示为边,门图模型则将门表示为节点,门之间的连接表示为边。相对于房间图模型而言后者可支持非绕行的室内寻路,还可通过增加可视点的方式[21]确保节点之间的通视。
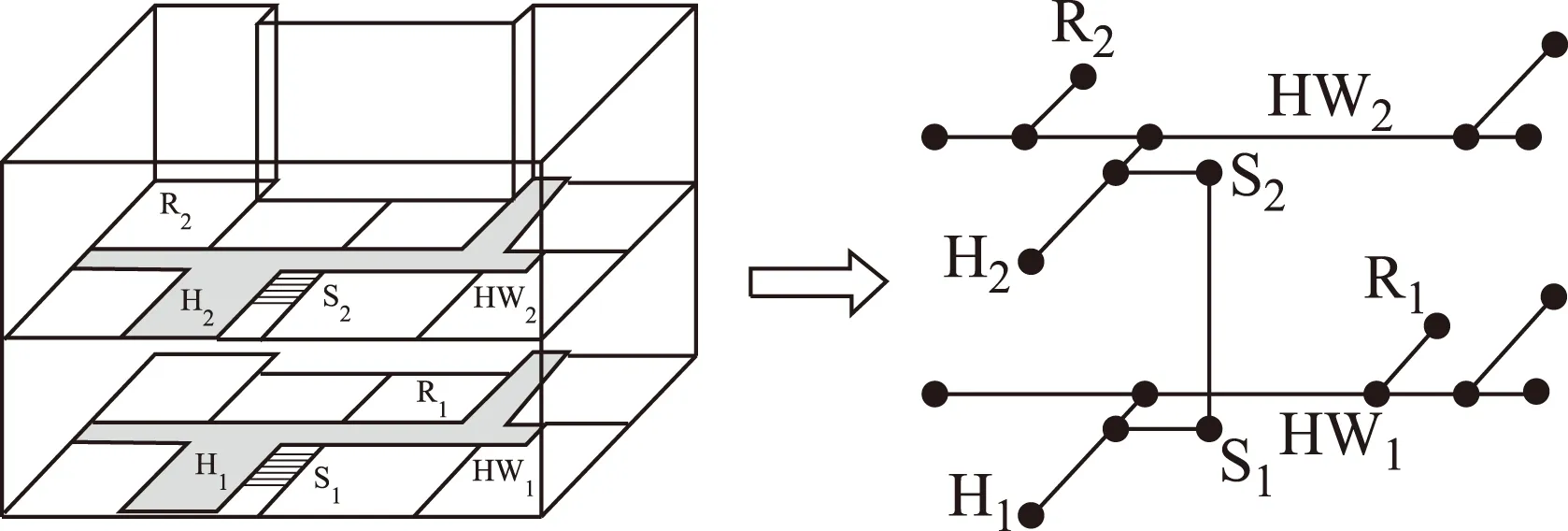
图3 建筑物和其对应的3维空间模型示意图[15]
尽管几何图模型存在多方面的优点,但是对于复杂结构的建筑物而言不能实现模型的自动构建。另外,当模型应用于范围查询时只能返回预先定义的节点空间信息而不能得到其他抽象层次的查询结果,解决的方法可以将图模型通过分级的方式组织,构建不同抽象层次的图模型[20]。
3.3 语义模型
语义模型通过对不同类型室内空间对象的区分,重点描述各类空间对象的属性、操作以及相互之间的关系,不仅包括描述性的功能还包括空间推理功能,通常和本体论相联系。文献[13]较早的提出了室内本体构建的问题,但没有给出具体的本体模型构建方式。文献[24]基于本体理论提出了室内导航本体模型,该模型主要用于个性化的室内导航,依据各路径组成片段不同的语义描述,将室内空间区分为水平过道、移动过道、空间出口、电梯出口等,并建立用户本体及两者之间的规则,实现了个性化的路径选择。该模型有别于IFC中对室内空间实体的区分方式,建模过程中重点表示了与路径相关的实体语义信息。文献[25]则基于IBM模型,利用其丰富的语义信息,并结合智能导航应用需求构建了室内导航本体模型。不同于其他模型,该模型将窗户表示为一个特殊的路径点以便支持紧急情况下的室内逃生。文献[26]基于本体理论,针对美国残疾法案(American disability act,ADA)标准下的不同类型用户需求,提出了用于室内空间寻路的本体模型并给出了对应的寻路算法。文献[27]则分别从概念空间、定性空间、定量空间来描述室内领域本体层三个不同方面的特性,例如对于一个门而言,概念空间描述了门的材料和颜色,定性空间描述了门和墙的相邻关系以及指定门所属的房间号等,定量空间则描述了门的长、宽、高以及具体的位置。文献[28]则提出在顶层、领域、任务、应用四个级别的室内外一体本体建模框架,并重点介绍了其中的室内结构本体模型和导航任务本体模型,为实现室内外一体的位置服务研究提供了一个较好的思路。
基于本体的室内语义模型可以用于支持室内的空间推理,常用于个性化的室内导航服务,也可以在一定程度的上支持位置查询、范围查询、最邻近查询等位置服务,通常将其与图模型相结合以实现更加精细化的室内位置服务。其他一些文献[1-2]中也有将基于本体的室内空空间模型归类为符号模型,文献[3]则将其称之为对象特征模型,本文将其看作是一类单独的室内空间模型主要是为了突出这类模型的本体推理功能。因为相对于室外而言,室内需更加强调个性化的位置服务[26],将更多的上下文信息纳入室内位置服务的考虑当中,而本体建模则是其有效的实现手段之一。
4 结束语
随着室内数据采集、室内定位、室内地图制作等相关技术的成熟以及对室内空间认知等理论的深入研究,将进一步的促进室内位置服务的发展,作为实现室内位置服务的基础与核心,室内空间建模已经成为位置服务领域的研究热点之一,并取得了一定的研究进展。尽管如此,面向位置服务的室内空间建模方面仍面临许多困难与挑战,有待进一步研究和解决,主要体现在以下3个方面:
(1)当前室内模型通常针对某一特定的应用领域,只表达了部分的室内空间信息,应用范围有限,如何综合考虑几何、拓扑、语义三类信息,构建一个可扩展、适用于多应用的室内空间模型还有待进一步研究。
(2)现有的室内空间模型不能满足室内外一体的位置服务应用需求,例如室内外一体的导航要求构建室内外一体的路网模型。因此,构建室内外一体的空间模型是未来需要重点关注的问题之一。
(3)效率是建模的一个重要影响因素,现有几何模型(如IFC模型、GityGML等)可以作为室内建模的重要数据源,但是如何有效利用现有几何模型,实现面向位置服务的室内空间模型的自动构建问题还没有得到很好的解决。例如,目前的室内网络模型构建的自动化程度仍然不高,下一步需集中研究如何有效减少建模的工作量,提高建模的效率。
[1] BECKER C,DÜRR F.On Location Models for UbiquitousComputing[EB/OL].[2014-08-02].ftp://inf.informatik.uni-stuttgart.de/pub/library/ncstrl.ustuttgart_fi/ART-2005-19/ART-2005-19.pdf.1.
[2] AFYOUNI I,RAY C,CLARAMUNT C.Spatial Models for Indoor and Context-aware Navigation Systems:A survey[J].Journal of Spatial Information Science(JOSIS),2012,4(1):85-123.
[3] 赵磊,金培权,张蓝蓝,等.LayeredModel:一个面向室内空间的移动对象数据模型[J].计算机研究与发展,2011,48(S1):274-281.
[4] WORBOYS M.Modeling Indoor Space[C]//Proceedings of the 3rd ACM SIGSPATIAL International Workshop on Indoor Spatial Awareness.Chicago:ACM,2011:1-6
[5] LI K J.Indoor Space:A New Notion of Space[C]//Web and Wireless Geographical Information Systems Lecture Notes in Computer Science.Berlin:Springer Berlin Heidelberg,2008:1-3.
[6] 张兰,王光霞,袁田,等.室内地图研究初探[J].测绘与空间地理信息,2013,36(9):43-47.
[7] LIU Liu,ZLATANOVA S.A “door-to-door” Path Finding Approach for Indoor Navigation[C]//Proceedings of GeoInformation for Disaster Management Conference 2011.Antalya:[s.n],2011:3-8.
[8] GILLIERON P Y,MERMINOD B.Personal Navigation System for Indoor Applications[C]//Proceedings of 11th International Association of Institutes of Navigation(IAIN)World Congress.Berlin:[s.n.],2003:21-24.
[9] LIN Ya-hong,LIU Yu-shen,GAO Ge,et al.The IFC-based Path Planning for 3D Indoor Spaces[J].Advanced Engineering Informatics,2013,27(2):189-205.
[10] LI Xiang,CLARAMUNT C,RAY C.A Grid Graph-based Model for the Analysis of 2D Indoor Spaces[J].Computers,Environment and Urban Systems,2010,34(6):532-540.
[11] DEMYEN D,BERO M.Efficient Triangulation-based Pathfinding[EB/OL].[2014-08-02].https://skatgame.net/mburo/ps/tra.pdf.
[12] WALLGRUN J O.Autonomous Construction of Hierarchical Voronoi-based Route Graph Representations[C]//Proceedings of the 4th International Conference on Spatial Cognition:Reasoning,Action,Interaction.Berlin:Springer-Verlag Berlin,Heidelberg,2005:413-433.
[13] BRUMITT B,SHAFER S.Topological World Modeling Using Semantic Spaces[EB/OL].[2014-08-02].//http://www.teco.edu/locationws/10.pdf.
[14] LI Dan-dan,LEE D L.A Lattice-based Semantic Location Model for Indoor Navigation[C]//Proceedings of 9th International Conference on Mobile Data Management(MDM'08).Beijing:IEEE,2008:17-24.
[15] LEE J.A Three-dimensional Navigable Data Model to Support Emergency Response in Microspatial Built-environments[J].Annals of the Association of American Geographers,2007,97(3):512-529.
[16] THILL J C,DAO T H D,ZHOU Yu-hong.Traveling in the Three-dimensional City:Applications in Route Planning,Accessibility Assessment,Location Analysis and beyond[J].Journal of Transport Geography,2011,19(3):405-421.
[17] 徐效波,吴华玲,郭先春,等.交通网络的建筑物内部三维网络模型[J].测绘科学,2013,38(6):1-3.
[18] LEE J,ZLATANOVA S.A 3D Data Model and Topological Analyses for Emergency Response in Urban Areas[EB/OL].[2014-08-02].http://www.gdmc.nl/publications/2008/3D_data_model_topological_analyses.pdf.
[19] BECKER T,NAGEL C,KOLBE T H.Supporting Contexts for Indoor Navigation Using a Multilayered Space Model[C]//Proceedings of 10th International Conference on Mobile Data Management:Systems,Services and Middleware(MDM'09).Taipei:IEEE,2009:680-685.
[20] LORENZ B,OHLBACH H J,STOFFEL E P.A Hybrid Spatial Model for Representing Indoor Environments[C]//Web and Wireless Geographical Information Systems.Berlin:Springer-Verlag Berlin,Heidelberg,2006:102-112.
[21] GOETZ M,ZIPF A.Formal Definition of a User-adaptive and Length-optimal Routing Graph for Complex Indoor Environments[J].Geo-Spatial Information Science,2011,14(2):119-128.
[22] LIU Liu,ZLATANOVA S.A Two-level Path-finding Strategy for Indoor Navigation[C]//Intelligent Systems for Crisis Management.Berlin:Springer-Verlag Berlin,Heidelberg,2013:31-42.
[23] YUAN Wen-jie,SCHNEIDER M.iNav:An Indoor Navigation Model Supporting Length-dependent Optimal Routing[C]//Geospatial Thinking.Berlin:Springer-Verlag Berlin,Heidelberg,2010:299-313.
[24] TSETSOS V,ANAGNOSTOPOULOS C,KIKAIRAS P,et al.Semantically Enriched Navigation for Indoor Environments[J].International Journal of Web and Grid Services,2006,2(4):453-478.
[25] LI Yuan,HE Zi-zhang.3D Indoor Navigation:a Framework of Combining BIM with 3D GIS[EB/OL].[2014-08-02].http://www.isocarp.net/Data/case_studies/1187.pdf.
[26] DUDAS PM,MAHSA G,KARIMI H.ONALIN:Ontology and Algorithm for Indoor Routing[C]//Proceedings of 10th International Conference on Mobile Data Management:Systems,Services and Middleware(MDM '09).Taipei:IEEE,2009:720-725.
[27] BHATT M,DYLLA F,HOIS J.Spatio-terminological Inference for the Design of Ambient Environments[C]//Spatial Information Theory.Berlin:Springer-Verlag Berlin,Heidelberg,2009:371-391.
[28] YANG Li-ping,WORBOYS M.A Navigation Ontology for Outdoor-indoor Space:(Work-in-progress)[EB/OL].[2014-08-02].http://www.worboys.org/publications/ISA2011Yang.pdf.