自治Lienard系统边缘线性化简化HX表示
2014-01-15杨文光韩元良
杨文光,韩元良
(华北科技学院 基础部,北京 东燕郊 101601)
0 引言
2002年,文献[1]提出了基于模糊推理的HX方法,成为继机理建模法和系统辨识建模法之后的第三种建模方法,该方法通过采样获取的数据,依据插值机理建立了对应系统的变系数非线性微分方程(组),为解决被控对象难于建模的问题提供了新思路。文献[2]为了方便进行系统的定性或定量分析,提出了“边缘线性化方法”,得到了变系数线性模型。随着时间的推移,模糊推理建模方法不断发展,文献[3]将其推广到时变系统的建模上,同样得到了较好的理论和仿真结果。文献[4]利用文献[1]理论将模糊推理建模法应用到了连续混沌系统的建模中,推导得到了三阶混沌系统的状态空间模型,但随着系统阶数的升高,模型的推导变的越来越复杂,很有必要进行简化。
模糊推理建模法作为处理非线性系统建模的新方法,仅需利用采样数据就较为容易的得到了所研究问题的近似模型,这为其他研究问题提供了重要支撑。自治Lienard系统在大气动力学、物理学、生物学等领域有着广泛的应用[5],因此有必要对其进行更为简捷的表示和建模,文献[5]相比于文献[1],进行了简化探索,使得Lienard系统的模糊推理建模表示为二阶变系数非线性常微分方程,但简化后的系统仍为非线性系统。文献[6-7]尝试将模糊推理建模方法应用到实际系统的建模或控制中,收到了较好效果,反映出模糊推理建模方法具有较好的应用前景。本文将在上述文献工作基础上,将边缘线性化模糊推理建模法应用到自治Lienard系统中,使得HX方程表示成为更为简捷的变系数线性微分方程,时空复杂度得到极大简化,进一步丰富模糊推理建模方法。
1 边缘线性化模糊推理建模
现以二阶Lienard系统为例给出相关的基本概念和记号。



(1)
其中i=1,2,…,p,j=1,2,…,q.
定义1.3[2]设Ai的隶属函数为“矩形波”
(2)
设Bj的隶属函数为“三角波”:
(3)
设Cij为单点模糊集,其隶属函数为:
(4)

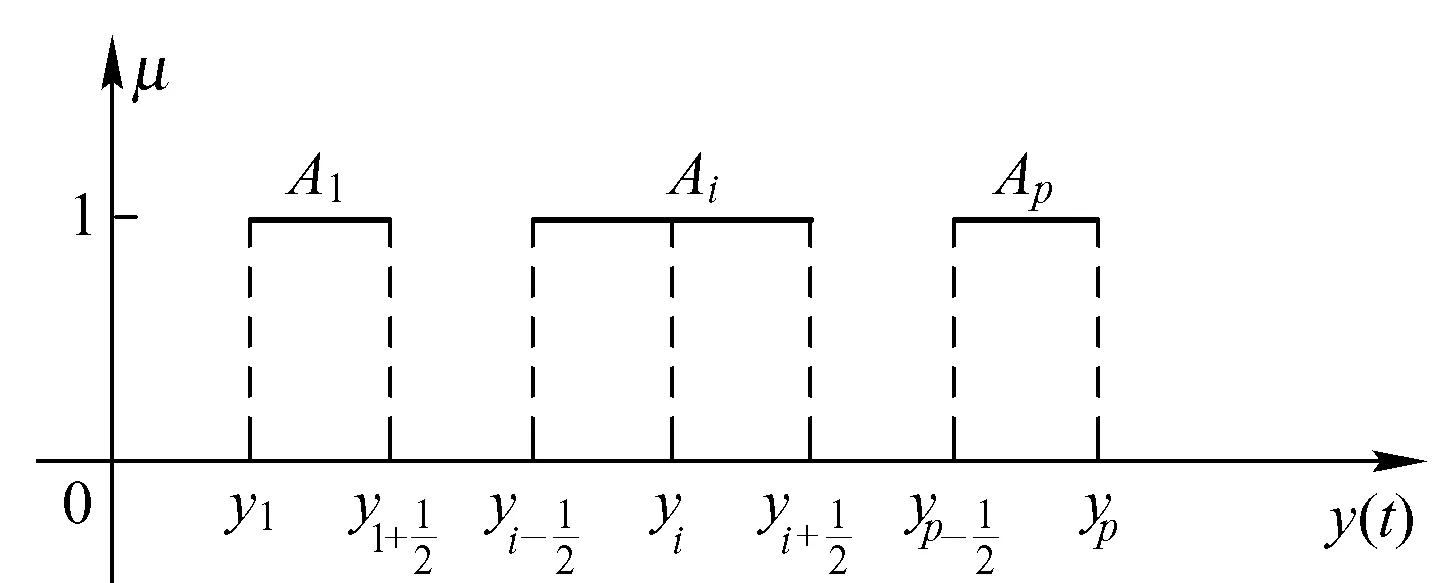
图1 Ai的“矩形波”隶属函数
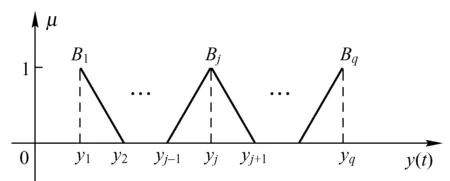
图2 Bj的“三角波”隶属函数
引理1.1[2]在上述假定和公式(2)、(3)、(4)作用下,基于(1)式的二阶系统的输入输出模型表示为二阶变系数线性微分方程

(5)

(6)
(7)

(8)
2 自治Lienard系统边缘线性化简化HX表示
边缘线性化模糊推理建模通过将状态y(t)论域上的三角波隶属函数改为矩形波隶属函数,使得原模糊推理模型中的非线性因素消失,达到了线性化目的,但对于(5)式仍需要分片求解,运行时间较长,存在进一步简化的必要。本节将给出自治Lienard系统的简化边缘线性化HX表示。

(9)

(10)
(11)

根据文献[6],对于满足公式(1)的二阶自治Lienard系统可以表示为一个二元分片插值函数,其处在局部(i,j)片上的函数形式为
(12)


(13)


(14)

定理2.1的建立使得二阶自治Lienard系统建模表示得到极大简化,进行逐段求解p个简化边缘线性化HX方程即可,对于局部表达式(14),它为常系数线性微分方程,推广到整体,则公式(9)成为变系数线性微分方程,于是可以得到与公式(1)对应的模糊规则形式
(15)
其中i=1,2,…,p,j=1,2,…,q.
3 仿真实验
现选择Vandel Pol方程[1,2,5],它是特殊的Lienard系统,简述边缘线性化简化HX表示的实现过程
(16)
其中μ=1.
步骤1 以公式(16)作为真实系统,确定y(t)的取值范围,然后确定论域Y=[a1,b1],其中a1=min(y(t))-0.1abs(min(y(t))),b1=max(y(t))-0.1abs(max(y(t))),max(), min(), abs()分别为MATLAB软件中的取大、取小、取绝对值操作。

步骤3 按照公式(10)、(11)计算每段上的系数Pi,Qi,i=1,2,…,p.

(17)
采用MATLAB7.5.0(R2007b)按照上述步骤完成近似模型建模,绘出x1(t),x2(t)与相平面曲线,选择仿真时间T=20s,分布完成了分段数p=6与p=20的仿真,见图3、图4.随之p的增大,获取的系统信息越丰富,建模精度越高,当p=20时,各种曲线基本完全重合,而程序运行总时长仅为0.230903s,该仿真结果表明,相比于参考文献,本文简化边缘线性化HX方法的运行时间得到极大缩短,而逼近精度并没有受到影响。
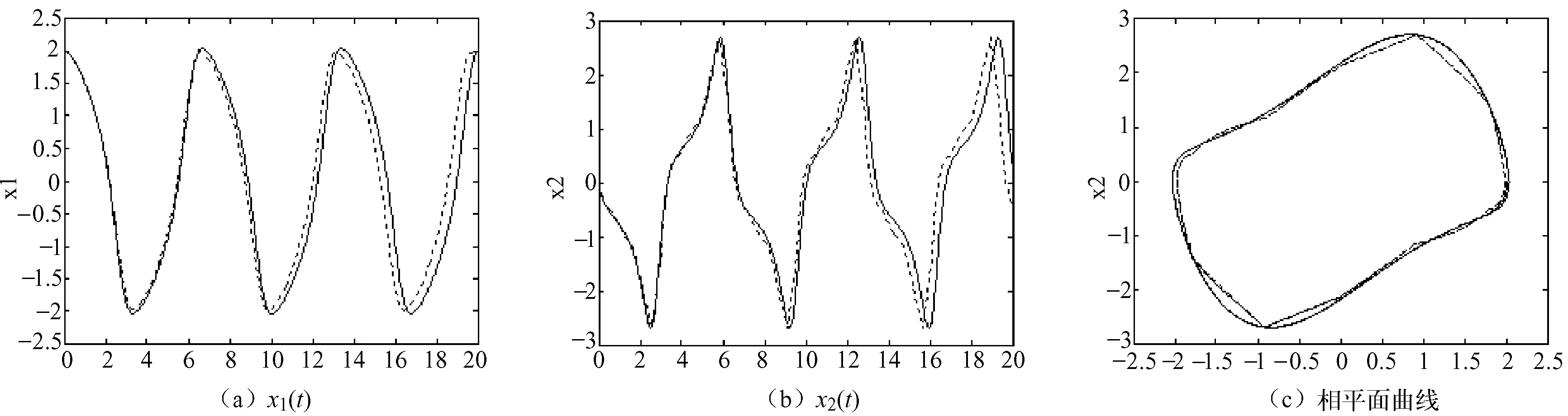
图3 p=6时系统运行曲线

图4 p=20时系统运行曲线
注:图3、图4中的实线表示真实系统,虚线表示近似模型。
通过把边缘“Y”上的模糊集选为“矩形波”,并将其应用到具体的自治Lienard系统,而得到更为简化的HX表示。以上的仿真实验表明,对于自治Lienard系统完全可以通过采样,获取系统状态取值,就可以通过求解方程完成模糊推理建模,时空复杂度得到极大简化,这是在模糊推理建模方面对于具体的自治Lienard系统建模的很好补充。
[1] 李洪兴,王加银,苗志宏. 模糊控制系统的建模[J]. 中国科学(A辑),2002,32(9):772-781.
[2] 李洪兴,王加银,苗志宏. 模糊控制系统建模中的边缘线性化方法[J]. 自然科学进展,2003,13(5): 466-472.
[3] 李洪兴,宋文彦,袁学海,等. 基于Fuzzy推理的时变系统建模[J]. 系统科学与数学,2009,29(8):1109-1128.
[4] 范丹丹,方建安. 连续混沌系统的模糊建模[J]. 东华大学学报(自然科学版),2005,31(1): 6-10.
[5] 赵纬经,李洪兴. 自治Lienard系统的简化HX方法[J]. 模糊系统与数学,2013,27(1):96-103.
[6] 王志新,谷云东,李洪兴. 单水箱液位控制系统的模糊推理建模及仿真[J]. 模糊系统与数学,2007,21(2):141-147.
[7] 杨文光,赵海良. 一类非线性系统的模糊推理建模与控制仿真[J]. 河北科技大学学报,2008,29(2):165-168.
