基于颜色对抗和旋转对称的路标检测算法
2014-01-15黄跃凯吴达德
黄跃凯,徐 丹,曾 昊,吴达德
(江苏科技大学 计算机科学与工程学院,江苏 镇江 212003)
交通标志可以制定行为规则、告知路况,对行车和行人给与指导或警告,在日常交通中具有至关重要的作用。除此之外,交通标志的自动检测与识别作为自动驾驶和智能车辆视觉感知系统的一部分也受到越来越多的关注[1-3]。然而,以下原因导致路标检测成为较具挑战性的工作:1)颜色信息容易受光照和天气影响;2)交通事故或极端天气会使路标旋转、变形;3)嘈杂环境下交通标志容易淹没于背景中。
由于交通标志具有明显的颜色和形状特征,现有的交通标志检测方法多以颜色分割和形状分析为主。基于颜色阈值的算法首先选定一个作者认为合适的颜色空间然后借助阈值将路标和背景区分开来。在[3]中,作者以红色为参照颜色将RGB颜色分量归一化,然后采用固定的阈值进行分割。在[4]中,作者选择CIElab空间因为此颜色空间可以单独处理颜色和强度信息。文献[1]则选择对光照不敏感的HIS颜色空间。然而颜色空间的转换消耗了算法的实时性。对此,Gómez-Moreno做了细致的比较,认为归一化的RGB空间改进算法性能的同时保证了较低的计算代价[5]。
在形状检测方面Barners和他的同事做了很优秀的工作。其在[6]中提出利用径向对称变换检测圆的算法,之后此方法被推广至八边形、矩形和三角形[7]。径向对称变换是一种单变量的转换,每一个边缘点独立于其邻域单独向多个累加器投票,这就导致了较高的虚警率。为了解决这个问题Belaroussi和Tarel提出了BCT算法,采用成对的梯度向量向其中点投影的方法找出多边形的中心[8],遗憾的是这种方法不适用于三角形。
以上算法虽然在特定的情况下取得了较好的检测效果,仍然存在着在计算量大和鲁棒性差的不足。本文提出利用颜色对抗性突出红色和黄色区域,从复杂的背景中提取出交通标志。另外,采用旋转对称投影的方法确定路标的中心和尺度。最后结合形状分析进一步区分路标类别并降低虚警率。
1 颜色对抗性
在人眼的视觉机制中存在着相互对立的颜色对,如黑/白,红/绿,黄/蓝。Itti在其显著性模型中首先归一化红、绿、蓝、黄各分量,然后利用颜色对抗性创建红绿,蓝黄颜色特征图。Woong-Jae Won等人进一步提出颜色对比图的概念,这种颜色对比图能够突出红色、黄色和蓝色区域。在此基础上,我们改进了黄色分量的归一化方法以及颜色对比图的生成方法,改进后的算法能够更明显的突出红色和黄色区域,同时保持蓝色区域与[10]中的算法效果相同,如图1所示。
颜色分量归一化公式为:

颜色对比图生成公式为:

2 旋转对称中心投影
2.1 旋转对称
对于任意一对不平行的点向量(pi,pj),总存在一个点p使得pi围绕其旋转一定角度后pj与完全重合,则p是pi和pj的旋转对称中心。 记为 rc(pi,pj)=p。 图 2 表示了 pi,pj和旋转中心p之间的关系。p可由公式(3)得到。

式中,xi,yi是 pi的坐标,γ 是 pipj连线与水平方向的夹角,可以由pi和pj的坐标计算得到。r是pi,pj与p之间的距离,可由公式(4)得到。

图1 颜色对比图Fig.1 Contrast images

图2 点向量pi,pj的旋转对称中心Fig.2 Rotational center of point vectors piand pj

式中,d 是 pi与 pj之间的距离。分别用 φi,φj表示 pi,pj的梯度方向,则有
至此,公式(3)的未知量都得到求解。
2.2 旋转中心投影
警告路标可近似为等边三角形,符合角度为的旋转对称,即等边三角形的任一边和顶点旋转2π/3后与另一边和顶点完全重合。通过梯度方向相差2π/3的点对向其旋转中心投影可以确定等边三角形的位置和尺度。圆形满足任意角度的旋转对称,此种方法也可以同时检测圆形路标。对旋转中心投影的强度采用广义对称变换的对称强度计算方法。
对于图像中的任一点p,定义向量集合

p点的投影累加器定义为:

C(i,j)是点对(pi,pj)对其旋转对称中心投影的强度大小,与点对之间的距离、点对之间的梯度方向以及点对的梯度强度有关。具体表示如下:

式中D(i,j)为距离权重函数,在GST中采用的是连续函数,权重随‖pipj‖的增大而减小。本文采用离散函数来表示,将路标的尺度限制在固定的范围[Rmin,Rmax]内。距离权重函数表示如下:

Φ(i,j)是方向权重函数,圆形和三角形均满足角度为 2π/3的旋转对称,因此只有梯度方向相差2π/3的点对才能向其旋转中心投影,定义如下:

式中δ是很小的角度,小于这个角度可以认为|φj-φi|和2π/3大致相等,本文中 δ取 π/18。 ri,rj是梯度强度的函数,定义为 ri=log(1+‖ni‖),ni是 pi的梯度向量。
另外,定义累加器diam,在对中心p进行投影的同时,累加投影点对的距离。投影结束后,利用式(11)计算多边形的大致尺度。

式中N为向中心p投影的点对的数量。
综上,旋转中心投影的过程如下:
(1)求灰度图(颜色对比图)的梯度。为降低计算量同时减少噪声的影响,忽略幅值过小的梯度。
(2)寻找满足距离和梯度方向条件的点对。这个过程非常耗时,如果没有任何优化其时间复杂度为O(m2),m为图像中的像素数。为了加快算法的执行速度,将像素的梯度方向(-π,π)均匀分为36个子集,即δ取π/18。对于特定子集中的点,其对应点在与其相差12的子集中。找到满足梯度方向的点对后再用距离条件进一步减少点对的数量。
(3)对于每对点对利用式(3)找到其旋转对称中心,以ri,rj为权重向中心投影。最终的投影图像是与原图像尺寸相同的灰度图,投影图中亮度最大的点即为多边形的中心。如图3所示。
(4)利用式(11)计算多边形的尺度信息。
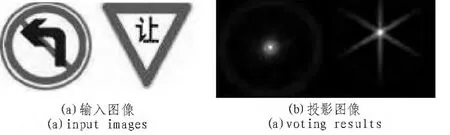
图3 投影结果Fig.3 Voting results of input images
3 形状分析
这里采用多边形的边数NumSides进一步区分目标形状。为了得到Numsides,需要计算从多边形中心到边界的距离,这里用d来表示。如图4所示,在顶点处d有最大值然后逐渐减小,在边的中点达到最小。因此,从中点到边界点的距离呈抛物线状,波谷代表从中心到边中点的距离,波峰代表从中心到顶点的距离,抛物线的峰-谷数代表了多边形的边数。需要注意的是,向中心投票的点中不光有边界点,还有路标内部的点以及背景中的噪声点,在计算NumSides之前首先提取路标的边界点,如图5所示。
4 实验结果与分析
4.1 实验结果
为了验证本方法的有效性和实时性,在实景拍摄的交通标志图片库上进行实验。该图片库主要由项目组利用Canon Digital IXUS 65相机采集,还有一部分禁止路标由于其通用性,采用了西班牙研究者提供的图片(http://agamenon.tsc.uah.es/)。所有图片的大小均为640*480,包括多种天气和光照情况下的交通标志。实验结果如图5所示。
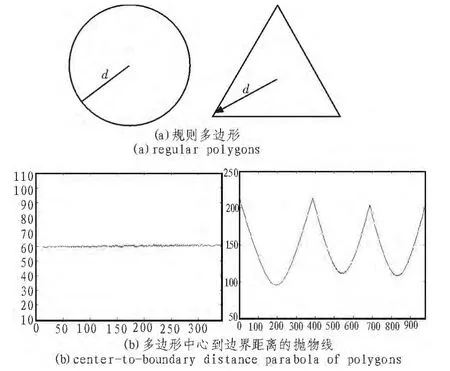
图4 计算多边形边数Fig.4 Computing polygons’side number
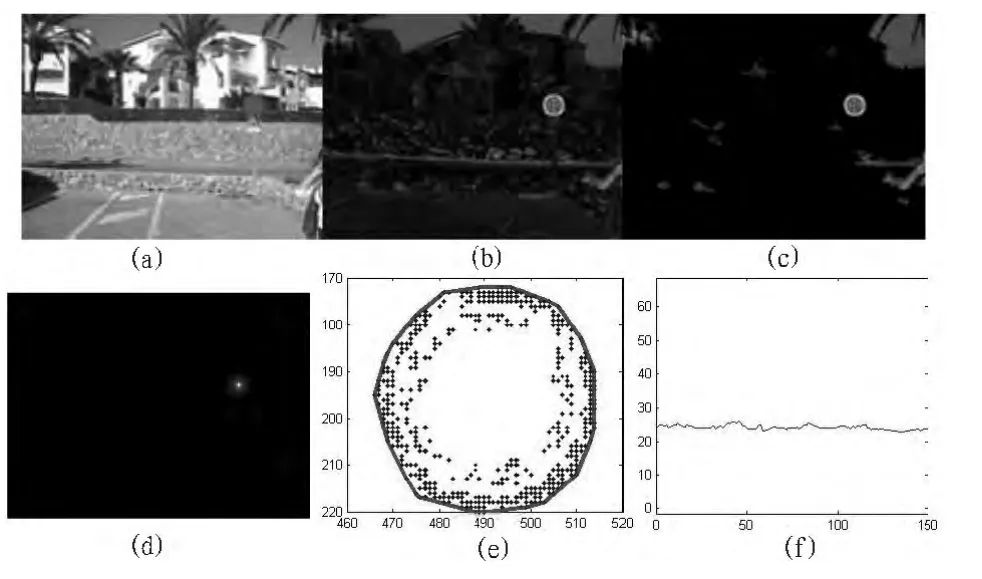
图5 禁止标志检测Fig.5 Detection of prohibition sign
图5 显示了所提算法检测交通标志的流程和结果。(a)是输入图像。(b)是颜色对比图,经过颜色对抗性处理红色区域被明显提升。(c)根据经验值排除面积和纵横比不和理的区域。对于面积阈值的设定,以图像的高、宽中较小的为参照标准,排除尺寸小于其1/20或大于其2/3的区域。区域的纵横比限制在1/1.9至1.9之间[1]。(d)满足条件的点对向其旋转中心投影后的图像。(e)显示向中心投影的各点的位置,并标出边界。(f)边界到中心的距离曲线。
4.2 性能分析
本实验中采用278张图片中的40种共366个有效交通标志进行测试。根据检测的难易程度,分别将警告和禁止标志分为4类,如图6所示。测试结果如表1,2所示。
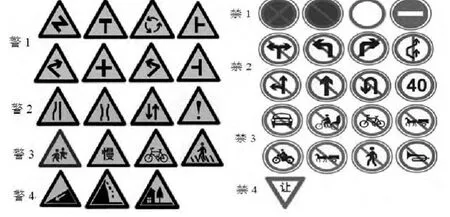
图6 禁止标志和警告标志分类Fig.6 Categories of prohibition and warning signs
警告标志的第1类和第2类内部符号比较简单,经过颜色对抗处理后可得到完整的三角形,故其检测率较高。第3类警告标志相对复杂,但没有影响到三角形的边缘。第4类难度最大,图符内容影响了边缘的完整性,在成像条件好的情况下可以成功检测,在路标过小或光线较暗的情况下会漏检。由表1可见,警告标志的检测率和漏检率分别为93.6%和6.4%。禁止标志的红色圆形边框能够形成明显的投影中心,检测结果明显优于警告标志,分别为96.7%和3.3%。整个系统的测试结果如表2所示:算法的检测率为95.4%,漏检率为4.6%,虚警率为4.2%。算法虚警率主要来源于路边的圆形广告牌以及与交通标志颜色相近的车辆。

表1 交通标志分类检测结果Tab.1 Detection result of traffic signs
系统采用C++语言在2.59 GHZ,Pentium IV机器上编程实现,平均每幅图像耗时98 ms,即每秒10帧,以车辆60 km/h的速度计,本算法满足实时要求。

表2 检测结果统计Tab.2 Statistic of detection result
5 结 论
文中提出了一种基于颜色对抗性和旋转中心投影的实时路标检测方法。该方法有效规避了基于颜色的算法对光照敏感以及基于形状的算法实时性不高的问题,在满足实时要求的情况下取得了较好的检测结果。通过实验验证了以下结论:
1)在实验数据集上达到95.6%检测率和4.4%的漏检率。2)在Pentium IV平台上利用 C++编程,达到 10帧/秒的处理速度,满足实时处理的要求。3)利用形状分析,进一步区分路标的形状,减少识别阶段的工作量。4)对光照、旋转、尺度变化有一定的不变性。综上,该方法能够满足智能车辆安全行驶时交通标志检测的实时性和鲁棒性要求,并为交通标志的识别提供准确的位置和尺度信息。
[1]Maldonado-Bascn S,Lafuente-Arroyo S,Gil-Jimnez P,et al.Road-sign detection and recognition based on support vector machines[J].IEEE Trans.Intell.Transp,2007,8(2):264-278.
[2]缪小冬,李舜酩,沈峘,等.基于对抗色的交通标志检测方法[J].仪器仪表学报,2012,33(1):56-61.MIAO Xiao-dong,LI Shun-ming,SHEN Huan,et al.Opponentcolor based traffic sign detection[J].Chinese Journal of Scientific Instrument,2012,33(1):56-61.
[3]Xu D,Tang Z,Yan X.Real time road sign detection based on rotationalcenter voting and shape analysis[C]//Mechatronics and Automation (ICMA), 2012 International Conference on.IEEE,2012:1972-1977.
[4]Khan J F,Bhuiyan S M A,Adhami R R.Image segmentation and shape analysis for road-sign detection[J].IEEE Trans.Intell.Transp,2011,12(1):83-96.
[5]Gomez-Moreno H,Maldonado-Bascon S,Gil-Jimenez P,et al.Goal Evaluation of Segmentation Algorithms for Traffic Sign Recognition[J].IEEE Trans.Intell.Transp,2010,11 (4):917-930.
[6]Barnes N,Zelinsky A.Real-time radial symmetry for speed sign detection[J].in Intelligent Vehicles Symposium,2004 IEEE,2004:566-571.
[7]Barnes N,Loy G,Shaw D.The regular polygon detector[J].Pattern Recognition,2010:592-602.
[8]Belaroussi R,Tarel J.A real time road sign detection using bilateral Chinese transform[J].Advanced in Visual Computing,2009:1161-1170.