如何将小行星改成武器
2014-01-06吴国兴
□ 吴国兴
编者按:本刊在今年第6期和第8期介绍了把小行星作为武器的威力,本文介绍了美国小行星任务的三个阶段以及每一阶段的主要任务和关键技术。重点分析第二阶段和第三阶段中美国航宇局(NASA)没有公开说明的部分,即第二阶段的月球远程逆行轨道和第三阶段中航天员的作用和任务。作者认为:月球远程逆行轨道与小行星重定向没有明显关系,该轨道主要是用来部署小行星太空武器,它是小行星武器的理想轨道;在第三阶段中用自动化装置或机器人即可完成在小行星上采集样品,完全不需要航天员,航天员到上面的真正目的是完成小行星的武器化改装,即将自然小行星改装成真正的太空武器。作者观点不代表本刊立场。
美国“小行星重定向计划”分三个阶段执行:第一阶段,寻找和发现适当数量并满足条件的候选小行星,然后从候选小行星中选定要捕获的目标小行星;第二阶段,对选定的小行星进行捕获并搬运到月球远程逆行轨道上,这些工作是由机器人来完成;第三阶段,由航天员乘坐“猎户座”载人飞船与小行星交会,并从小行星上采集标本,然后返回地球。在这三个阶段中每一阶段都有各自的目标、任务和关键技术。对于第一阶段,更确切的说应该是小行星任务的准备阶段,这一阶段虽然没有明确的关键技术,但这一阶段的结果对整个小行星计划的完成至关重要。
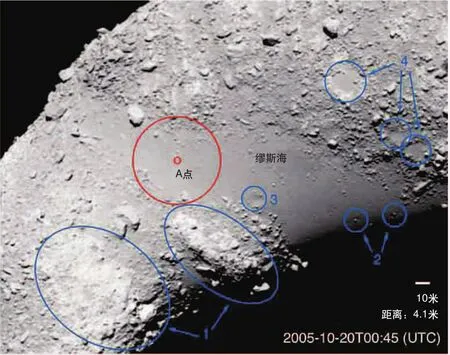
小行星“丝川”上的平坦区域缪斯海

小行星“丝川”全貌
如何寻找和挑选小行星
NASA寻找小行星的任务分地面和太空两方面进行:地面的寻找主要是亚利桑那州的“卡塔利娜巡天计划”(任务就是发现小行星和彗星);使用夏威夷的全景巡天望远镜和快速反应系统;还有是使用新墨西哥州的太空监视望远镜。太空寻找主要使用天基广角红外探测望远镜。NASA的专家说,通过使用多种寻找手段,该局每月可以找到100多颗小行星,每年可找到1000多颗。目前已经寻找到1万多颗,而且95%是直径在1千米以上的小行星。
找到小行星后还要按标准进行筛选。在小行星重定向计划中候选小行星有两个方案:A方案和B方案。A方案是捕获一颗直径在4米~10米、质量不超过1000吨的完整小行星,然后将它搬运在月球远程逆行轨道上;B方案是在一颗直径为100米以上的大型小行星上抓取一颗直径仅有2米~4米的大卵石,卵石重在10吨~70吨之间。
这两个方案各有优缺点。对于A方案,优点是这种小行星的数量众多,数以百万计,而且捕获操作也相对简单;缺点是对这种小行星的组成、结构、大小和密度都缺乏深入了解,而且可能旋转速度比较快,另外如果小行星的体积和密度太大,可能会增加完成任务的风险。
对于B方案,优点是对小行星的质量没有严格限制,容易筛选出比较理想的目标小行星,而且这种小行星一般旋转速度不会太大,因而降低了操作风险;缺点是必须首先确定卵石的组成成分与大型小行星上的是否一致,而且是否可以方便的从大型小行星上获取。为了获取这些信息,NASA可能还需要先发射一艘飞船去探测清楚。NASA目前对这两个方案同时进行研究,估计在今年年底之前通过风险评估会从两个方案中初步选取一个。因为小行星捕获飞船的发射预计是在2019年,可能要到发射前一年,才能最后选定。
不同方案选择小行星的标准不同。A方案的选择标准是:具有像地球一样围绕太阳运行的轨道;在本世纪20年代早期接近地球;小行星的最宽处不能大于10米。B方案的标准是:小行星在轨道运行时不太容易被其他小行星碰撞;小行星的最宽处在100米~500米之间;小行星的转速每分钟不能大于2圈。
目前已给每个方案分别选择了3颗候选小行星。A方案的是:2009BD、2013EC20和 2011MD。B方案的是:小行星 25143,又名“丝川”;2008EV5和第101955号小行星“Bennu”。日本的“隼鸟”号探测器曾于2005年访问过“丝川”;美国的“起源、光谱释义、资源识别、安全、风化层探测器”(OSIRIS-Rex)将于2016年访问“Bennu”。2011MD不像是单一的、坚实的、块状的小行星,它内部65%是孔隙,也就是说它的内部三分之二是空的。因此这颗小行星更像是一堆松散的瓦砾被引力吸引在一起。
对于B方案,一些专家比较看好“丝川”。“丝川”的体积是535×294×209米, 质 量 3.5×1010千克。“丝川”具有以下优势:它满足了NASA选择小行星的所有标准;由于日本的“隼鸟”号已经访问过这颗小行星,因而使NASA可以借鉴日本的经验,少走弯路;“隼鸟”号发现这颗小行星上有许多卵石。数据表明:小行星上直径2米~5米的卵石多达数千块。另外,这颗小行星的表面有20%的区域是比较光滑和平坦的,其中有一块比较大的平坦区域称为缪斯海,最宽处达60米,上面布满数以百计的卵石。
第二阶段的关键技术
美国“小行星重定向计划”第二阶段的主要任务是使用一艘无人的小行星重定向飞船对小行星进行交会、捕获和返回,最后将小行星放置在所谓的月球远程逆行轨道上。无人飞船由两个舱组成:任务舱和太阳能电推进舱。任务舱包括航天电子舱、传感器组件和捕获机构;太阳能电推进舱包括飞船的所有推力和电力系统。第二阶段的关键技术是太阳能电推进技术、小行星捕获技术和月球远程逆行轨道。
太阳能电推进技术和太阳能电推进舱
太阳能电推进技术是一种具有高比冲、高功率和高效率的推进技术,NASA在很多场合都强调太阳能电推进技术的重要性,认为这是小行星重定向计划的关键技术。NASA在其官网上说,太阳能电推进技术是NASA一直在开发的关键技术。这种技术不仅安全性好,成本低,而且具有卓越的推力,能够保证完成NASA在内太阳系的各种探测任务,如到达火星和小行星等。NASA负责小行星计划的一位高级官员说:“这种大功率的太阳能电推进技术非常适合于小行星任务,如果没有这项技术,我们不可能提出小行星重定向这样的任务。”
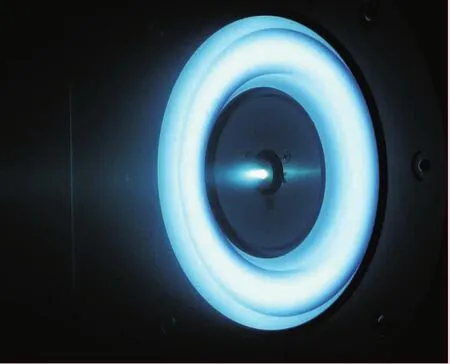
美国航宇局的太阳能电推进系统
虽然太阳能电推进技术并不是NASA的专利,俄罗斯、欧洲空间局、日本和我国都在开发这种技术,只不过NASA目前在这方面可能走在前头。NASA对这种技术的开发已经有20多年的历史,前几年的研究主要是围绕人类的火星飞行和月球探测任务。NASA在决定小行星任务时将这种系统称为“大力士”。专家估计,在小行星任务中使用这样的系统可以将发射质量减少50%。
小行星重定向飞船上的太阳能电推进舱由离子推进器、太阳电池阵、机械结构、热控系统和反应控制系统五个分系统组成:
离子推进器分系统包括4个配有万向支架的霍尔推进器和装有10000千克氙气的8个无缝氙气箱。霍尔推进器是一种供航天器用的基于等离子的推进系统。在过去30年中,俄罗斯有100多台霍尔推进器在太空运行。美国目前最先进的霍尔推进器是BPT-4000,这种推进器在美国空军的极高频卫星上使用。这种推进器的功率水平高达4.5千瓦,比冲2000。不过NASA的小行星任务要求功率水平达到10千瓦,比冲3000。
50千瓦的太阳能电池阵列分系统还包括太阳能电池阵列的驱动器,电源管理和电力分配系统。这种太阳能电池阵列是一种高功率、高强度和长寿命的列阵,由两个直径为10.7米的圆形列阵组成。这种太阳能电池的特点是能耐受空间宇宙辐射的损伤,使用寿命在15至20年。
专家估计,将来要捕获和重定向直径更大的小行星,特别是作为武器用的小行星,还需要研制更先进的太阳能电推进系统,这种系统的操作功率至少应在300千瓦以上,推进剂氙气储箱的储存能力应在40000千克以上,而且整个系统的使用寿命应在两到四万小时以上。
小行星的捕获过程和捕获系统
小行星重定向任务的第二阶段是无人飞船与小行星交会与捕获。除了交会与捕获外,这一阶段还包括飞船接近小行星和对小行星的特征观测。在对小行星的特征观测时,飞船的位置和姿态是在以小行星为中心的参照系中进行运动,并通过不同角度的照明来对小行星进行观察,以进一步确定其形状和旋转状态。
飞船应该在交会前几个月就通过图像和测量仪器确定小行星的具体位置。由于小行星只有7米~10米宽(按照第一方案),飞船只有在10万千米~20万千米时才能发现目标。当距离小行星1.6千米时,飞船开始靠近小行星并在小行星周围漫游;当距离为150米时,飞船就要较长时间停在那儿,并用雷达高度计来保持这个位置,同时使用光谱仪来测量小行星的表面组成,用1赫兹~2赫兹的帧频摄像机来确定小行星的旋转状态。
捕获操作最大的困难是小行星都是处于不停的旋转或滚翻状态。好在多数小行星的自旋速率是每分钟低于2转,当然也有少数自旋速率比较高的。NASA为此准备了两种捕获策略:被动式捕获和主动式捕获。
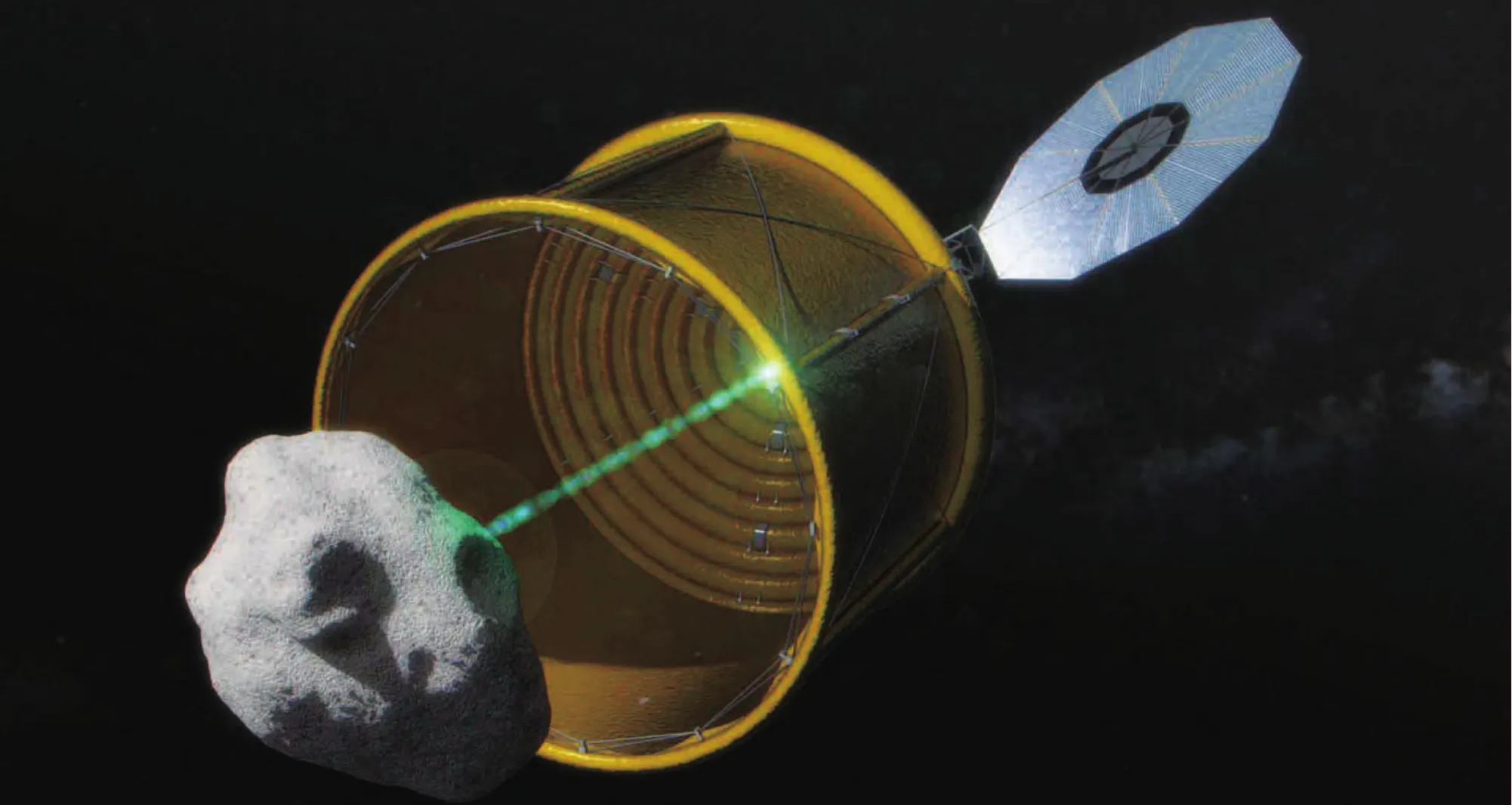
A方案的小行星捕获机构

“隼鸟”号探测器“丝川”小行星上采样

OSIRIS-REx计划中的探测器在小行星表面采集样本
由于小行星计划在目标小行星的选定上有两个方案,不同方案当然需要不同的捕获机构。目前对于A方案的捕获机构比较成熟,为了要捕获一颗完整的小行星,NASA主要使用一种呈圆筒形的高强度的软式充气袋。捕获时要求飞船配合小行星的旋转,同时迅速膨胀空气袋,将小行星“锁进”袋中,然后装进飞船内。这种捕获系统除了通过充气来展开充气袋以外,还有捕获臂以及用来束紧袋子的缆绳。当袋子充气并硬化时,至少4条捕获臂伸出并将袋子口张开。张开口的袋子大约长10米,直径15米。设计这种捕获机构的目的是为了可以捕获不同形状、不同强度、不同结构和不同旋转速率的小行星。
小行星的捕获过程大约分五步:一是抓住小行星,并用袋子将它罩住;二是将小行星拖进飞船内;三是活动一下小行星,让小行星在袋子内保持稳定;四是将捕获过程中从小行星外表脱落下来的结构材料重新粘贴在小行星上;最后将小行星固定好,完整运到月球远程逆行轨道。整个过程都是由机器人来完成。
对于B方案,即从一颗大型的小行星表面抓取一块2米~4米宽的大卵石,NASA对这种大卵石的捕获机构有两种设计:悬停式和接触式。顾名思义,所谓悬停式就是飞船悬停在小行星上空,没有降临在小行星上;而所谓接触式就是飞船降落在小行星表面,与小行星接触。目前NASA对这两种设计还在作进一步评估和研究。
月球远程逆行轨道
按照NASA的小行星重定向计划,当无人的小行星重定向飞船将捕获到的小行星经过漫长的地-月空间运送到月球并放置在月球远程逆行轨道上时,第二阶段的任务才算完成。什么是月球远程逆行轨道?为什么要将捕获来的小行星放置在这种轨道上?特别是将小行星放置在这样的轨道上对小行星重定向任务有何特殊意义?这些是需要详细讨论的。
首先,什么是月球远程逆行轨道?
在讨论月球远程逆行轨道前我们先要弄清什么是逆行轨道?在我们的太阳系内,所有的行星都是围绕着太阳运行,而且是沿着与太阳旋转方向相同的方向运行,这种运行称为顺行运行,这种运行所形成的轨道称为顺行轨道,反之则称为逆行轨道。在太阳系内,大部分行星自身的旋转方向也是跟太阳一样,称为顺行旋转,不过金星和天王星除外,这两颗行星是逆行旋转。另外,大部分行星的卫星也是与行星旋转方向相同的方向运行,即在顺行轨道上运行,但天王星的卫星不同,天王星的卫星与天王星的自转相同,但与太阳的旋转相反。还有一些卫星是在逆行轨道上运行,不过这些卫星一般比较小、而且距离行星较远(如海王星的卫星)。天文学家认为,这些卫星一般是在其他地方形成的,然后被某些行星捕获到自己的轨道上。

“隼鸟”号探测器的返回舱
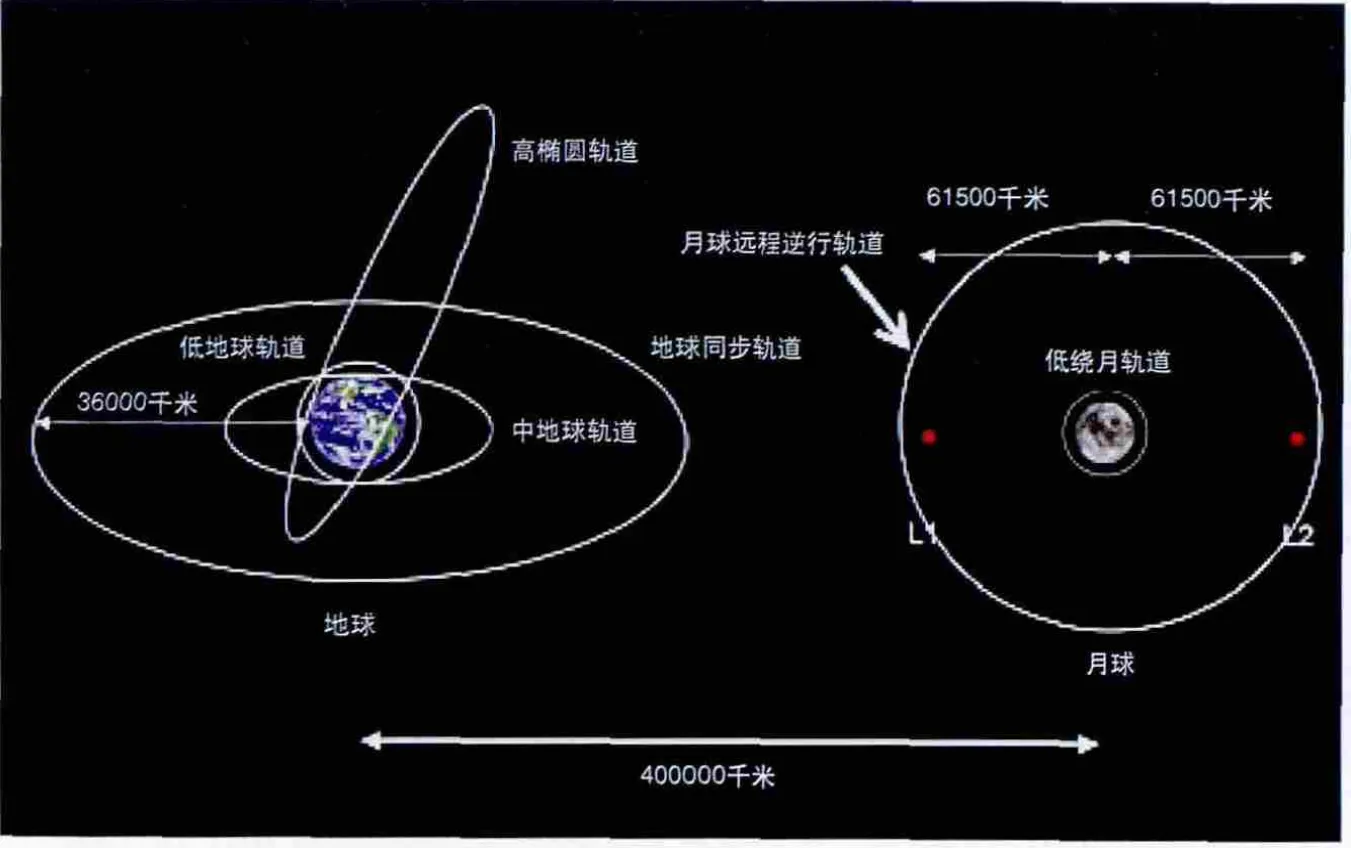
绕地和绕月轨道对比
月球的逆行轨道为什么称为“远程”,这是因为这条轨道距离月球70000千米。这可能是各种轨道中最远的,地球的静止轨道距离地面才35786千米,因此这条月球轨道比地球静止轨道还要高出一倍。为什么要选用这样的高度?专家认为主要是为了保证轨道的稳定性。这条轨道又称为“隔离轨道”,因为它可以避开各种“引力效应”,减少“小行星扰动”,从而使小行星在这条轨道上保持100年以上的稳定。
第二,为什么要将捕获来的小行星放置在月球远程逆行轨道上?
美国凯克空间研究所在2012年的《小行星捕获可行性研究报告》中,没有明确提出要将被捕获的小行星放置在月球远程逆行轨道上,而是说要将其放置在月球轨道上或者地-月空间的拉格朗日点附近。2013年NASA才明确要将捕获到的小行星放置在月球远程逆行轨道上,而主要理由就是放置在这里的小行星具有长达100年以上的轨道稳定性。
美国小行星重定向计划的目的有三:防止小行星撞击地球;提供人类飞往火星的“垫脚石”;开发太空资源(即在小行星上采矿)。将小行星放置在月球远程逆行轨道上 并保持100年以上的轨道稳定性跟这三个目的都不沾边:如果是防止小行星撞击地球,可以将小行星推离地球,而且推离得越远越好,根本用不着将小行星保存在月球轨道上长达100多年;如果要从小行星上采集标本,采集完后小行星就没有利用价值,也用不着在月球轨道上长期保存;如果是为了开发太空资源,为什么不直接从月球上采矿,而要舍近求远、不远万里去捕获小行星;另外,即使是在小行星上采矿,矿采完了小行星就成了废物,何必还要将它继续保存?还有,如果是作为人类飞往火星的“垫脚石”,现在美国的载人火星计划早已名不副实,“垫脚石”还有何用?
第三,小行星如果是作为太空武器,这条轨道就必不可少。
虽然在美国的小行星重定向计划中,对于将小行星放置在月球远程逆行轨道上的做法,几乎找不出任何有说服力的理由。但是如果该计划的目的不是上述三条,而是为了开发太空武器,将小行星放置在月球远程逆行轨道上就有充足理由,而且这样做是绝对必要、必不可少。
如果将作为太空武器的小行星长期放置在月球远程逆行轨道上,这条轨道就成为美国太空武器的武器库,航天员将小行星安放好并对准轰击目标后,它在这个位置上保持100年不变,这对于武器的保养和维护将带来极大地方便。试想:武器库中的小行星不是一颗或几颗,大大小小的小行星可能有十几颗甚至几十颗,分散部署在轨道的不同位置,而且航天员要从地球飞越48万千米才能到达这条轨道,这样遥远的航程和分散的部署,给日后的保养和维护带来极大的困难。如果小行星在轨道上保持长期的稳定,不需要经常的轨道维持和姿态修正,这样不仅节省了大量的人力物力,而且保证武器随时处于“临战姿态”,使小行星武器真正成为太空武器。因此,如果要将小行星开发为太空武器,就必须放置在这条轨道上,别无选择。
小行星计划第三阶段航天员的任务和作用
一旦被捕获的小行星被放置在月球远程逆行轨道上,计划就进入第三阶段。在此阶段航天员将乘坐“猎户座”多用途飞船,飞越地-月空间,到达月球远程逆行轨道,在轨道上“猎户座”飞船与小行星重定向飞船交会和对接,然后航天员要通过两次(每次4小时的)出舱活动,爬到小行星上,对小行星进行直接的观察,同时采集小行星样品,最后带着样品返回地球。
小行星计划的第三阶段是有人参与阶段,按照NASA的说法,航天员上去的主要任务就是为了采集小行星的样品。不过从捕获的小行星上采集样品真的需要航天员“亲自出马”吗?航天员不远万里、乘坐“猎户座”飞船去与小行星交会、仅仅就是为了采集样品吗?
众所周知,日本“隼鸟”号探测器曾于2003年5月升空,2005年9月12日飞抵“丝川”小行星,同年11月20日进行第一次采样,但没有成功,11月25日又进行第二次采样,获得成功。后“隼鸟”号离开小行星,并于2010年6月13日返回地球。“隼鸟”号是无人探测器,没有航天员在上面。因此“隼鸟”号的经验证明,对小行星采集样品根本用不着航天员“亲自出马”,使用自动化装置或机器人即可圆满完成任务。在美国小行星重定向计划中NASA让航天员上去到底是为了什么?
这个问题只能从小行星武器化中才能找到答案。

“猎户座”载人飞船与小行星重定向飞船对接
NASA如果要将小行星开发为太空武器,不能直接使用自然的小行星,必须对小行星进行武器化处理,即将自然小行星改装为小行星武器。只有将这种经过改装的小行星放置在月球远程逆行轨道上,小行星才能作为太空武器使用,而改装自然小行星并不是一件简单或容易的事情。小行星的改装首先是要根据小行星的体积和质量,在小行星上安装上各种推进装置或设备,将小行星“投向”地面指定目标。从月球远程逆行轨道到地球的直线距离大约有33万千米,小行星不仅要顺利完成这段遥远的航程,而且还要保持一定的飞行速度。作为武器使用的小行星,飞行速度极为重要,因为有些直径较小的小行星,提高飞行速度以后可以发挥出直径较大的小行星同样的威力。除了保证小行星高速完成这段遥远的航程以外,还要保证小行星最后能准确的命中目标。小行星都是一些外形极不规整的“石头”,质心、密度和内部结构都不确定,在长距离的高速飞行途中甚至还会发生“解体”,如何让这样的“石头”最后能准确命中目标,可能是小行星武器化过程中的最后一道障碍。试想:如果这些从天上飞来的石头最后不能准确命中目标,而是砸在其他地方,甚至砸在自己的头上,后果真是不堪设想。目前太空武器专家虽然已经想出一些办法,但能不能最后解决问题还有待实践的考验。
航天员爬到小行星上准备采集样品
太空武器专家还认为,NASA在正式开始部署小行星武器前,可能会在地-月空间的拉格朗日点L1或L2附近建立一个长期的小行星武器改装平台,平台上不仅有航天员,还有改装用的各种器材和设备,小行星重定向飞船带着捕获来的小行星应该是先到达这个平台,按照任务要求对小行星进行改装,然后再将改装好的小行星再部署在月球远程逆行轨道上。
因此对自然小行星的武器化改装,不是一项简单航天任务,而是一项需要复杂技术和大量复杂设备的武器改装工程。因此可以说,在小行星上采集样品可以不用航天员,但是要将自然小行星改装为小行星武器,就非航天员不可。
美国的“小行星重定向计划”实际上是小行星太空武器开发计划。显而易见,这项计划中所有的内容和任务都是为着开发这种新型太空武器。但NASA并没有将计划的内容和任务全部公开,仅只是公开了计划的前一半,隐瞒了计划的最核心的和最重要的后一半。
