固态发射机监控系统的双热备份设计
2014-01-01李桂新
李桂新
(南京电子技术研究所, 南京210039)
0 引言
雷达发射机一般采用可变脉冲工作比方式工作,同时具有功率密度大、高压大电流和能量热耗高等特点,这就导致系统内的空间磁场分布具有很多不确定因素。显而易见,发射机符合干扰源的所有特性,因此,发射机往往也是雷达中可靠性最低的分系统,是制约雷达系统整体可靠性的关键设备。但某些特殊体制的雷达,如气象探测雷达、港口管制雷达、空情警戒雷达,要求雷达设备能全天候工作,对设备的可靠性提出很高要求[1]。
随着现代固态发射机技术的发展,一套完善的监控系统既可以降低操作者的使用难度,同时又对雷达系统的工作稳定性和性能提升具有决定性作用。
1 发射机监控的系统组成
固态雷达的发射机系统一般采用模块化设计,各部分均能独立工作,并通过天线由合成器将发射功率辐射到空间去。组成一个完整的固态发射机分系统的关键模块主要有:前级功放、末级功放、前级电源、发射电源、辅助电源、风机组件、双工开关组件和监测控制分机。发射机监控系统组成框图如图1所示。
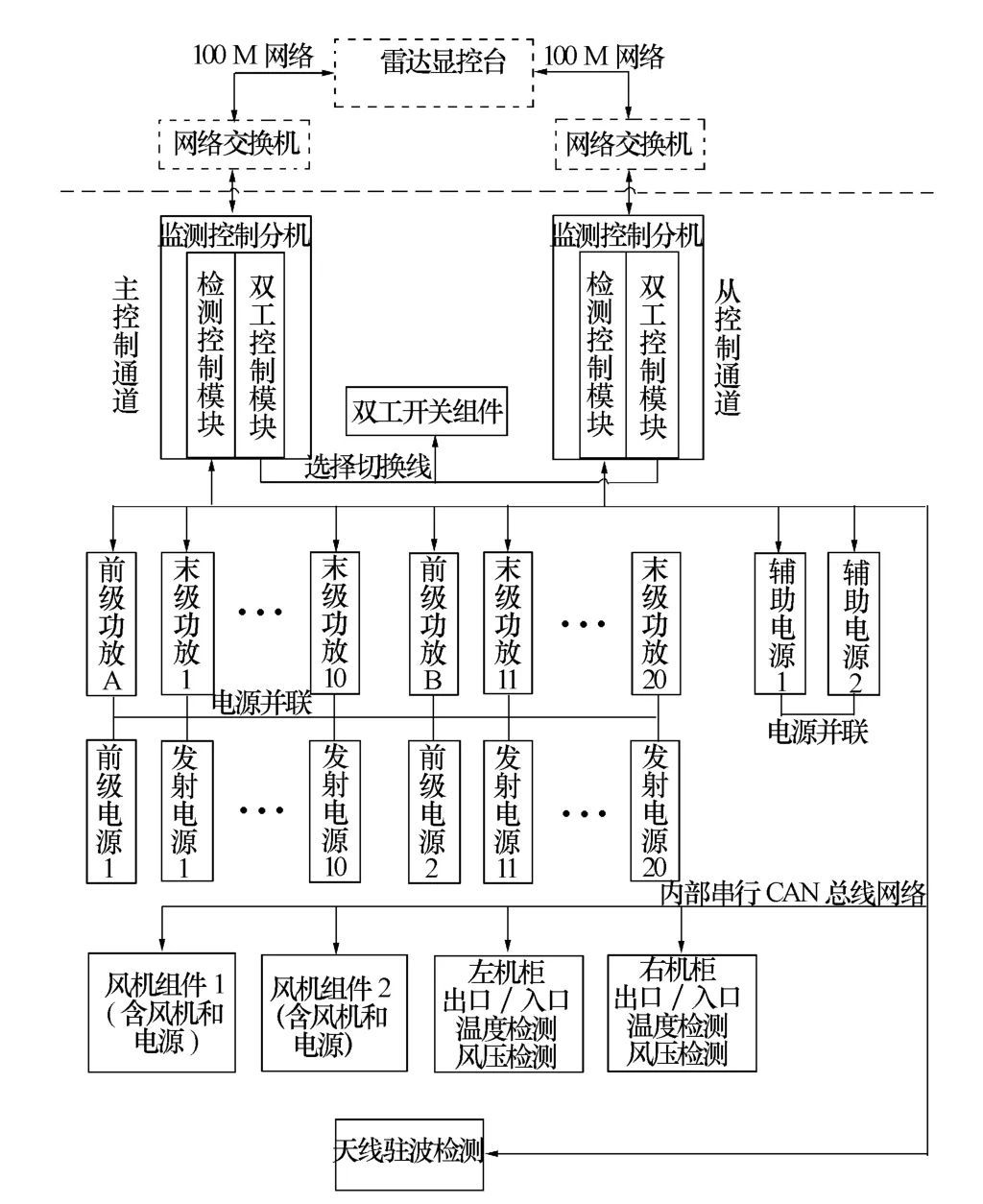
图1 发射机监控系统组成框图
监测控制分机是固态发射机监控系统的核心部件,主要负责管控发射机内部各组成设备,对运行中出现的各种故障及时响应并实施保护。监测控制分机的另一个主要功能是通过网络介质负责与雷达主控台的联络通信,从而完成雷达对发射机的远程监控。
发射机内部设备之间采用控制局域网总线(CAN总线)方式串行组网,分布节点多达五十多个,且分布在三个不同的机柜中。在工业控制领域,CAN总线具有极高的总线利用率和电磁抗干扰能力,可以根据报文的编号决定接收或屏蔽该报文,既支持多主构架的系统,也支持主从方式的系统[2]。该总线规范能够检测出产生的任何总线错误,在发送信息遭到破坏后能自动启用重发机制。如果该错误持续存在,在错误达到128次后,该节点会自动脱离总线,从而不影响其他节点的正常工作。待总线错误消失后,该节点又会自动接入网络系统继续通信[3]。
在发射机监控系统内部,可监控的状态量有功放组件和电源组件的电流值、温度值及故障状态,风机组件的转速信息,机柜的出入口温度值和风压值,以及天线驻波、双工开关位置等。监控系统依靠不同的设备编号来识别这些信息。
2 双热备份的实现原理
雷达设备的工作可靠与否,直接关系到所负责空域的安全和操作员的人身安全。双热备份设计方案的目的就是在雷达设备工作出现致命性故障时,监控系统能够自动切换到备份通道,从而保证雷达能继续正常工作。
要真正实现雷达发射机双热备份功能,原则上发射机系统内部就必须拥有两套完全独立的硬件设备。但考虑实际情况,采用并联冗余和增加关键设备硬件相结合的方式即可满足发射机系统的任务可靠性要求[4]。
发射机内部的功放组件、风机组件和各种电源均采用并联方式实现冗余备份;而监测控制分机和双工开关均属于关键设备,则采用增加独立硬件的方式来实现冗余[5]。这些设备工作时均处于热备份状态,发生故障时会自动切换到备份通道继续工作,不会影响系统的性能指标。
一套完整的监测控制分机包含检测控制模块和双工控制模块两部分,这两个模块均由各自独立的电源供电。平时不需要两套硬件均处于带电运行状态,即热备份状态。正常主控制通道工作时,主通道中的检测控制模块和双工控制模块拥有设备的完全管控权力,既可以检测发射机状态,又可以控制发射机;而从控制通道的检测控制模块和双工控制模块则处于热备份状态,只能被动收集设备状态信息,没有控制权限,不能操控发射机。反之,从控制通道工作时,主控制通道处于热备份状态。
当主控制通道发生故障时,发射机监控系统的工作软件会根据事先设定的判断准则自动切换,或按主控台指令要求人工切换到从控制通道,把控制权限移交给从通道,由从通道负责接管设备,从而使发射机继续工作。
监测控制分机中检测控制模块和双工控制模块在结构上采用带操作面板的插件形式。面板上装配必要的指示灯和功能按键,这些按键中还包含了手动控制按钮。在控制软件失效的紧急情况下,可以通过各个模块面板上的按键,手动实现对发射机的操控。
双工开关组件是单刀双掷开关设备,接受主从双工控制模块的控制,之间采用交叉连接的方式,共能实现四种组合控制。
考虑到在线维修的需求,在每个功能组件的供电回路均设置了单独电源开关。当设备故障时,只需关掉对应的电源开关,就可以在雷达发射机不停机的状态下更换备件,能真正实现设备故障时在线维修。
3 检测控制模块的设计
检测控制模块是监测控制分机中的管理中心,主要由基于X86构架的PC104、实现总线译码的EPLD以及用于一些IO通道控制的外围芯片组成。其功能原理组成图如图2所示。
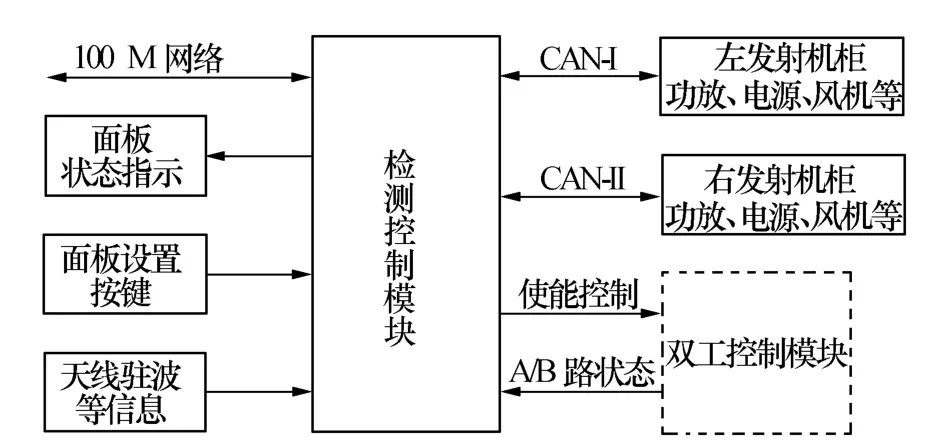
图2 检测控制模块功能框图
方案中的PC104是一款嵌入式计算机,秉承了IBM-PC开放式总线架构的优点,为嵌入式开发应用提供了标准的系统平台。
检测控制模块在发射监控系统中主要完成以下四个功能:
(1)负责巡检发射机内部CAN总线上的数据,并通过总线完成对各个组成节点的软件开关机和异常故障保护;
(2)负责通过网络和雷达主控台进行数据交换,上报发射机状态信息,接收雷控的遥控指令;
(3)根据准则判断主从工作方式,并通过分机内部的连接总线向双工控制模块发出双工控制切换指令;
(4)负责检测天线驻波等重要故障信息和面板按键信息,完成对发射机的控制。
4 双工控制模块的设计
双工控制模块的主要作用是自动检测前级放大器的工作状态,故障时能自动切换到备份通道。雷达的双工开关主要由两个耦合器、一个射频开关和一个固定功率负载组成。两路前级功放组件输出的功率信号,各自通过一路检测耦合器送到射频开关,射频开关是双刀双掷机械式开关。前级功放组件A路工作时,由射频开关经分配器把对应的输出功率接入到末级放大器,另一路前级功放组件B路输出功率直接送到固定的功率负载[6]。双工开关原理图如图3所示。

图3 双工开关原理图
当检测电路检测到有输入激励但没有输出信号时,由双工控制模块实施保护,在不停机状态下使前级放大器组件B自动接入末级电路,前级放大器组件A接入到固定负载,从而使发射机继续正常工作。
双工控制模块的功能性原理图如图4所示。
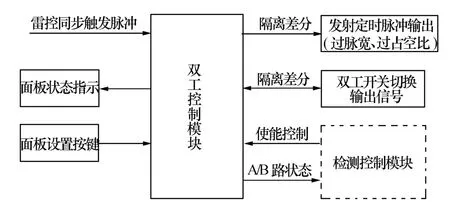
图4 双工控制模块功能框图
双工控制模块中的关键器件是EPLD,实现的主要功能有下述三点:
(1)完成数据总线的译码,实现与检测控制模块的硬件连接;
(2)根据检测控制模块的使能要求,完成双工切换功能和对前级输入射频的控制;
(3)实现对雷达总体送来的同步触发脉冲进行过脉宽、过工作比检测,正常时直通,故障时切断并告警。
在双工控制模块设计中,为提高抗干扰能力,所有的输入输出信号全部采用光耦隔离。嵌入在EPLD里面的软件代码采用模块化设计思想,比如过脉宽/过占空比等常用功能,用VHDL语言编写并封装成图形模块,方便日后直接调用,避免重复劳动。
5 交叉接口电路的设计
输入输出通道的接口电路设计是双机系统设计的关键。正常情况下,最终被控终端只有一个,而控制的输入信号却有两个。如何调度两个输入信号来控制一个对象,主要是由控制软件和外部硬件电路双重保证的。
控制软件主要负责工作方式的选择,是工作在主控制通道还是工作在从控制通道。硬件控制电路采用差分输出信号方式连接。差分发送芯片选用DS96F172M,,对应差分接收芯片为 DS96F173M。其发送芯片内部逻辑图如图5所示,对应的真值表如表1所示。
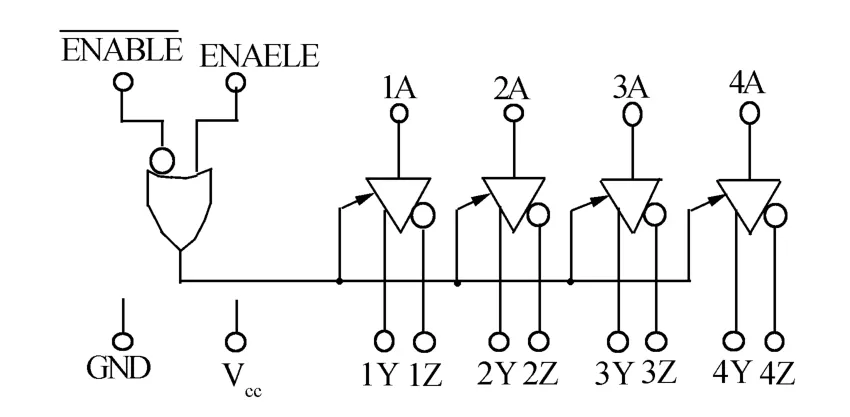
图5 发送芯片逻辑功能图
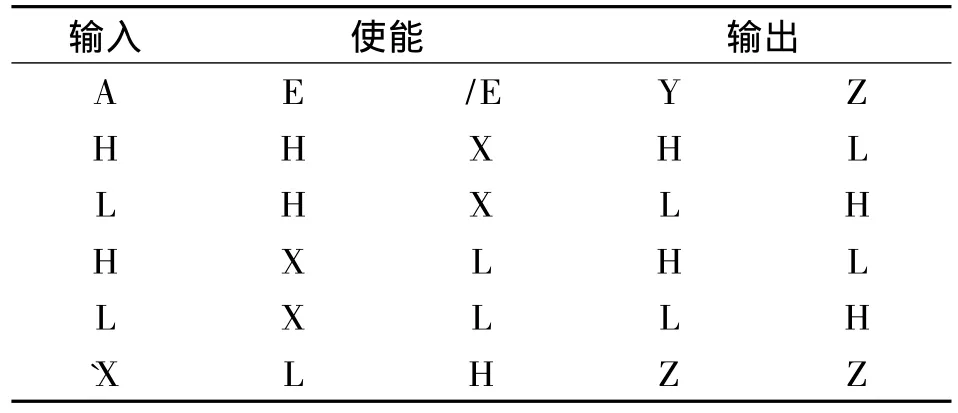
表1 DS96F172M逻辑真值表
众所周知,差分信号本身抗干扰能力就很强,该芯片还有一个关键的特点,提供使能控制信号。由表1可以看出,当控制端(Enable引脚)为低电平时,差分芯片输出的是高阻态。利用这种功能就很容易实现,当主通道处于工作态时,控制从通道使其输出在高阻状态,这样就不会影响对单一终端的控制,反之亦然。
6 主从模块的自动识别
主从检测控制模块、主从双工控制模块在电信设计和结构设计上完全一样,可以相互调换。模块在身份上的区别仅仅是靠分机接线备板上设置的不同初始状态来实现的。实际工程中,取信号插座中一位固定引脚接入不同电平值来区分,主通道是通过一个20 K电阻上拉到+5 V,从通道就直接接到地。系统复位上电启动后,软件立即检测该引脚上输入信号的状态,如果为高电平,配置该板为主控制模块;若为低电平,就配置为从控制模块。主从判断流程图如图6所示。

图6 主从身份识别判断流程
该设计方案电路简单,控制流程也不复杂。以备板插槽的位置来确定主从功能,有利于提高模块的互换性,减少硬件的备件数量,同时也统一了应用程序,方便软件维护。
7 监控软件的设计
VxWorks是美国风河公司1983年推出的一种嵌入式实时操作系统,以性能高、占用资源小、实时性强著称。该系统包括了中断处理、看门狗定时器、消息登录、内存分配、线缓冲和环缓冲管理、链表管理等功能,也支持 ANSI C标准,方便人员编程[7]。良好的持续发展能力、高性能的内核、卓越的实时性以及友好的用户开发环境,使VxWorks系统在民用、军工、航天等领域均占有很大的市场份额,被广泛应用于许多高精尖技术行业。
嵌入式控制软件的核心功能是协调管控两套互为热备份的监测控制分机。控制软件从功能角度可以分为五大作业模块:开关控制任务、数据通信任务、接口管理模块和其他后台任务。具体流程图如图7所示。
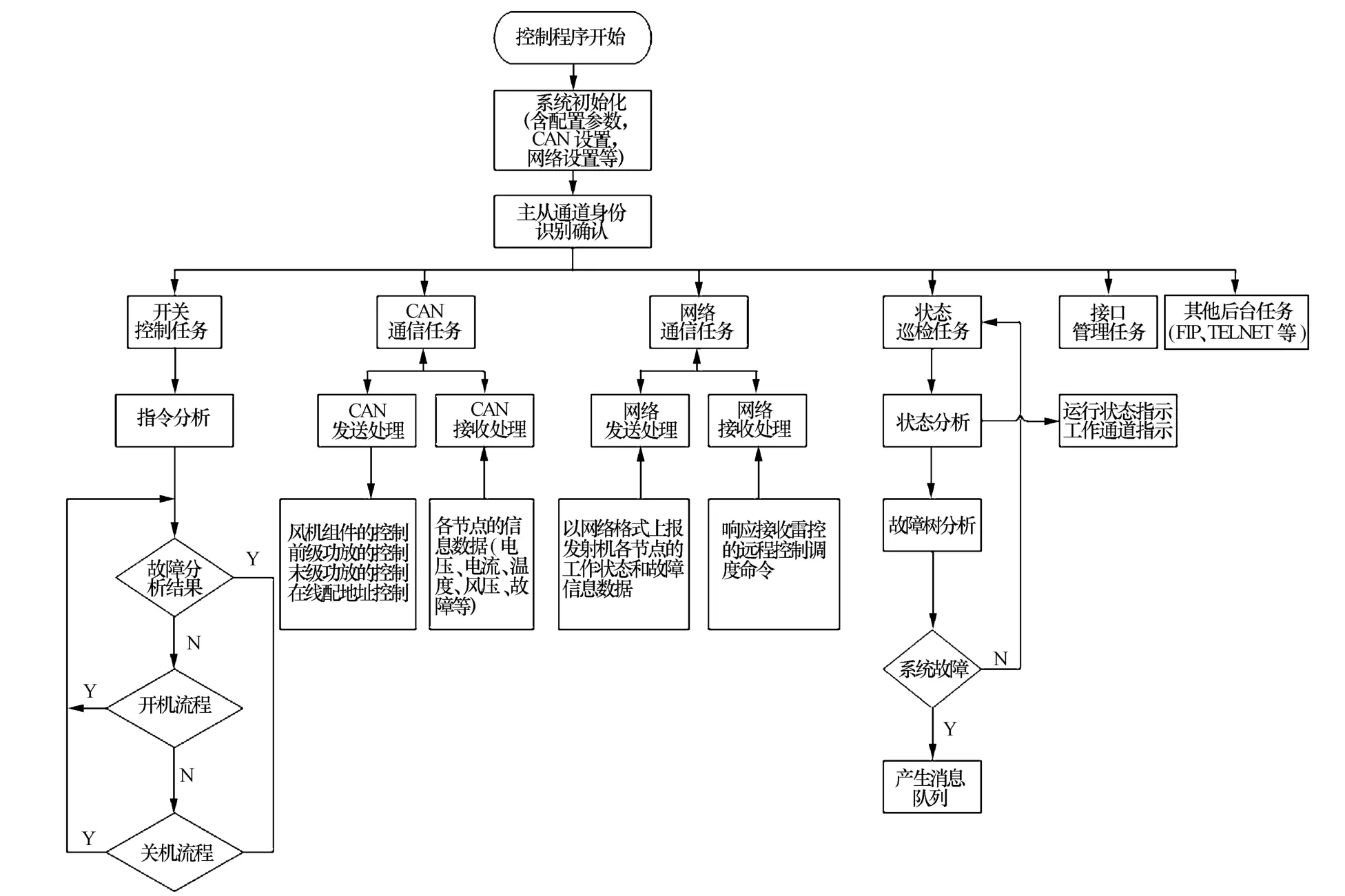
图7 软件控制流程图
基于VxWorks多任务优先级抢占方式的调度机制,控制软件中的几个任务在单位时间片上是并发进行的[8],每个任务划分完成不同的工作需求。下面就四个关键任务做简单描述。
开关控制任务:该任务的触发条件是主控台的远程开关控制指令和本地面板按键的控制指令。发射机收到开机命令后,打开发射风机,等到风机转速稳定,风压检测无故障后,打开发射电源,等电源软启完成正常输出电压后,打开末级功放组件,检测双工状态,正常后开前级组件,加发射定时输出功率。关机按反方向进行,待组件温度降到合理的环境温度条件时再关闭冷却风机。
数据通信任务:该任务包含CAN通信任务和网络通信任务。对内通过CAN总线采用主从问答模式巡检所有在线设备的状态信息,并将其转换成网络包格式暂存在内存中;对外实时解析雷控命令,并根据要求完成对发射机的各种控制,如:开关机命令、通道切换命令、响应查询命令等。
状态巡检任务:软件启动后自动周期性巡检系统内各个采样点的状态信息和故障信息。通过消息机制实时地反馈给其他任务完成故障连锁保护功能。
接口管理任务:设置这个任务的目的是提高通道切换的实时性,尽量压缩时间,保证系统故障发生后能以最快速度切换到备份通道。切换时首先关闭发射定时和目前正在工作的前级通道,然后切换开关到备份通道,最后打开备份前级和发射定时。
8 结束语
采用集中管理、分布控制的控制模型,利用两套硬件上完全相互独立的监控电路,就可以完成功能上互为冗余、互为补充的固态发射机监控系统的设计,真正实现双热备份功能。此方案可有效提高发射机监控系统的任务可靠性。文中提到的诸多实现方法可以直接应用于其他类似产品的监控系统设计,可节约大量人力资源和宝贵时间。
[1] 郑 新.雷达发射机技术[M].北京:电子工业出版社,2006.Zheng Xin.Technology of radar transmitter[M].Beijing:Publishing House of Electronics Industry,2006.
[2] 张晓平,施海峰.CAN总线在雷达监控中的应用[J].现代雷达,2003,25(9):8-10.Zhang Xiaoping,Shi Haifeng.Application of CAN bus technology to monitoring and control of radar system[J].Modern Radar,2003,25(9):8-10.
[3] 张 健,李 华.基于CAN总线技术的开关电源监控系统的设计[J].河北大学学报:自然科学版,2002,22(2):175-179.Zhang Jian,Li Hua.Design based on the CAN fieldbus technology of the switching power supply monitoring control system[J].Journal of Hebei University:Natural Science Edition,2002,22(2):175-179.
[4] 王 强.固态雷达发射机双监控系统[J].现代雷达,2004,26(1):56-58.Wang Qiang.A double monitoring and controlling system for solid-state radar transmitter[J].Modern Radar,2014,26(1):56-58.
[5] 曾 成,赵艳玲.模块式电源监控系统双机热备份的设计[J].电测与仪表,2013,50(10):124-128.Zeng Cheng,Zhao Yanling.Design of dual hot standby with monitoring system of power supply module[J].Electrical Measurement and Instrumentation,2013,50(10):124-128.
[6] 徐湘宁,姜 勇,谢 英,等.固态发射机中双工控制板的设计[J].电子工程师,2008,34(6):7-8,11.Xu Xiangning,Jiang Yong,Xie Ying,et al.Design of the duplex control board in the solid state transmitter[J].Electronic Engineer,2008,34(6):7-8,11.
[7] 谢拴勤,宋 岩.基于VxWorks的飞机电气处理机多任务程序设计[J].现代电子技术,2012,35(22):107-109,112.Xie Shuanqin,Song Yan.Multi-task program design of Vx-Works-based electric processor for planes[J].Modern Electronic Technique,2012,35(22):107-109,112.
[8] 陈怀民,王龙福,吴成富,等.基于VxWorks的分布式测试系统设计与实现[J].测控技术,2009,28(10):71-74.Chen Huaimin,Wang Longfu,Wu Chengfu,et al.Design and realization of distributed measurement system based on VxWorks[J].Measurement and Control Technology,2009,28(10):71-74.