现代有轨电车单相交流转辙机控制模块研究
2014-01-01陶玉凤
陶玉凤 何 涛 张 锐 朱 剑
随着城市轨道交通及其多元化交通工具的飞速发展,现代有轨电车已经得到国内外许多城市的关注和推广。现代有轨电车的兴起,不仅能够解决交通拥堵的问题,而且带来了巨大的商业契机。因此,研究开发与现代有轨电车相关的产品,对解决我国大多数城市目前面临的交通拥堵等问题具有十分积极的作用。
现代有轨电车单相交流转辙机控制模块隶属于现代有轨电车信号系统轨旁执行单元,是关系行车安全和效率的重要环节。采用单相交流电机做动力的转辙机,与直流电动转辙机相比,具有动作可靠、电机故障率低、维修工作量小等特点。在可靠性要求高、道岔动作频繁、不便于维护的使用环境中具有更明显的优势。因此,着手开发现代有轨电车信号系统具有重要意义。本次信号系统的研发主要涉及转辙机控制模块、信号机控制模块等,整个开发设计过程主要包括硬件电路板设计及控制软件的编写调试。本文主要针对单相交流转辙机控制模块,来论述其驱动采集一体化的设计过程。
1 控制模块功能及结构
1.1 主要功能
1.与通信模块通信,完成与轨旁控制器联锁主机的信息交互。
2.能够根据联锁命令,控制四线制交流转辙机转动到定位或反位。
3.能够实时采集道岔状态信息,并将状态信息发送到联锁主机。
4.监测转辙机动作情况,具有过流和短路自动保护功能。当电机过载或外线路短路时,该模块能够切断控制电路和电动机电路,可以省去继电器道岔控制电路中的熔断器。这样不仅能使电路得到简化,而且还能提高设备利用率(避免了由于更换熔丝不及时造成的设备局部停用)。
5.具有实时监测功能。可实时监测道岔位置;进行模块元器件的自动检测;转辙机在规定时间内未转换到底的挤岔报警;没有操作命令时,表示失去时间超过2 s自动报警。
1.2 硬件架构
根据转辙机控制模块功能需求,设计出如图1所示的四线制道岔控制模块硬件结构。其核心是由2个微处理器MCUA和MCUB组成的双MCU控制器。双MCU控制器接收来自联锁主机的道岔控制命令,并通过逻辑“与”运算,输出控制四线制道岔模块的动作驱动电路,实现转辙机定位与反位之间的转换。来自检测电路A和B的道岔表示信息,经过双MCU控制器的逻辑“与”运算后,发送给联锁主机。此外,双MCU控制器还能够实现对电路中的关键电路,以及重要元器件等的监测。如果双MCU控制器的“与”运算结果不一致,那么判定转辙机控制模块电路中存在故障,控制器发出相应报警信息或者切断动作过程,并将此结果通过总线上传给微机监测机。
此外,四线制道岔控制模块的主要电路还有通信电路、驱动电路、微控制器电路、检测电路和区段锁闭电路等。2路冗余通信总线用于实现整个转辙机控制模块与轨旁控制器联锁主机之间的安全通信功能;控制微控制器电路负责联锁信息的逻辑运算以及电路故障的诊断;区段锁闭电路与区段锁闭继电器连接,实现道岔区段是否锁闭的采集功能;检测电路用来检测和监测转辙机的动作电流,一方面在转辙机启动后,检测电路检测到电流,便进入自闭功能,当动作到位后,电流消失,则断开控制主回路;另一方面,它还包括道岔表示信号采集电路,用于采集转辙机位置,并将位置信息传递给双MCU控制器。转辙机驱动电路通过控制主回路通断,完成对四线制交流转辙机正转或反转的控制。
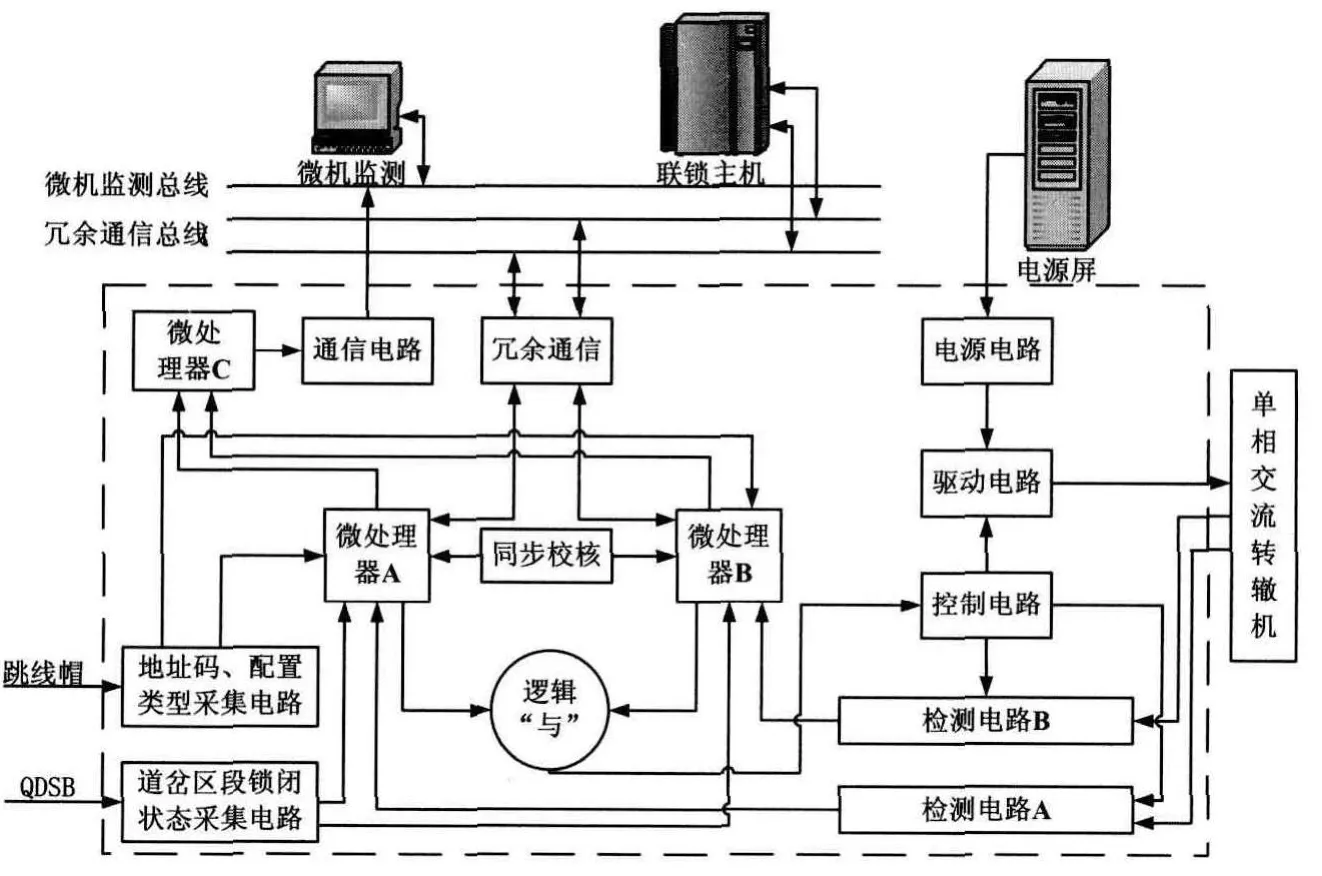
图1 四线制道岔控制模块硬件结构
2 主电路设计及分析
2.1 驱动电路
驱动电路主要完成对单相交流转辙机定操和反操的控制,根据既有四线制道岔控制电路设计的驱动电路模型如图2所示,它主要由微控制器电路、隔离驱动电路、动作开关电路和电流检测电路等组成。动作开关电路主要实现对定、反操电路的通断控制;电流检测电路完成对驱动电路动作电流的检测;微控制器电路负责根据联锁主机命令发出动作指令;隔离驱动电路采用光电隔离电路,主要是用来防护微控制器与动作电路的干扰;换相开关用来实现转辙机的正转或者反转。电源开关的设计目的在于转辙机转换过程中故障时,能及时切断动作电源以保护电路。

图2 四线制道岔模块驱动电路原理图
当单相交流转辙机由定位向反位转动时,来自微处理器的控制信息,首先通过隔离驱动电路,操作电源开关K1闭合,接着控制换向开关中的K2闭合。由于转辙机处在定位时,其第1组接点和第3组接点是闭合的,所以来自电源屏的220 V交流电经电源开关、电流检测单元和换相开关K2以及电缆线X2和X4传递到电动机,转辙机开始转动。转辙机启动后,电流检测电路检测到电流进入自闭功能。电动机转动过程中,首先断开转辙机的第3组定位表示接点,同时接通转辙机内部的第4组反位动作接点。电动机继续转动,待其转换到底的时候,瞬间接通转辙机内部第2组定位表示接点,同时断开第2组反位动作接点。由于转辙机第2组接点断开,同时断开了电动机的动作电路,电路中的电流为零。电流检测电路检测到电流消失,关闭动作电源。转辙机由反位向定位转动时,原理和向反位转动差不多,不同的是使用的电缆线不同,闭合的换相开关变为K3。转辙机无论是向反位转动还是向定位转动,都是首先闭合电源开关。
2.2 表示采集电路
根据原有的继电控制电路,可以设计如图3所示的表示信号采集电路模型。定位由X1和X3两根线确定,反位由X2和X3确定。表示采集电路主要由表示变压器BB、电阻R1、电阻R2、定位表示检测电路、反位表示检测电路等组成。表示变压器将AC220 V降压为表示采集电源,R1、R2分别为模拟继电表示电路中FBJ、DBJ线圈阻抗的电阻,定位表示检测电路和反位表示检测电路送入微控制器。
二极管D为转辙机终端电缆盒中的二极管,当道岔处于定位时X1与A连接、X3与B连接;反位时X2与B连接、X3与A连接。
分析图3所示表示采集电路原理图,当转辙机控制模块驱动道岔向定位转动时,待动作完毕,道岔启动电路切断,此时检测表示信号,定位和反位表示检测电路同时检测道岔位置信息。若有定位表示信号而无反位表示信号时,定位表示检测电路A和B分别将检测到的信息传给双MCU控制器进行校核,如果结果一致,则给出定位表示,如果不一致,则显示四开状态并上传报警信息。

图3 四线制道岔模块表示采集电路原理图
3 模块软件实现
模块软件严格遵循模块功能需求以及硬件电路原理,并结合相关安全技术进行设计,主要实现微控制器正常接收命令信号,并通过分析命令来进行逻辑运算及校验。若命令有效,则发出控制信号,实现对转辙机的控制,同时完成对表示信息的采集校验,判断道岔是否转动到位,保证控制的可靠性。其主程序软件流程图如图4所示。
该模块主要实现对各个子功能模块的调度运行功能。上电后调用上电初始化模块,完成各个寄存器配置以及系统上电自检功能。检查无故障后,调用开关量检测模块,检测继电器开关量信息。接下来调用通信处理模块,接收联锁主机下发的命令。然后调用同步信息处理模块,对2个微控制器的数据进行比较。如果同步信息一致,则表示收到信息正确。然后调用表示信息检测模块,对表示结果进行分析处理。经过对控制命令的判断,以及综合了道岔位置状态信息后,调用道岔动作模块对转辙机进行相应的动作处理。
4 结论

图4 主程序软件流程图
单相交流转辙机控制模块主要用于控制四线制交流转辙机,是现代有轨电车信号系统轨旁控制器的重要组成部分。模块按照故障-安全原则设计,采用动态控制和动态采集等安全技术,具有自检以及故障定位等功能。现代有轨电车信号系统采用这种轨旁全电子道岔执行模块,能够显著减少设备用房需求,减轻维护人员的工作量,大幅缩短故障排除时间。随着我国现代有轨电车及其他轨道交通形式的快速发展,全电子单相交流转辙机控制模块将得到越来越广泛的应用。该模块已在试验基地带动转辙机及道岔设备进行了测试,试验证明,该模块性能稳定,具有较强的实用价值,希望未来在有轨电车运营中得到广泛推广。
[1] 刘治彦,岳晓燕,赵睿.我国城市交通拥堵成因与治理对策[J].城市发展研究,2011,18(11):90-96.
[2] 王国军,贾利生,韩晓.有轨电车道岔控制方案及安装方式研究[J].铁道标准设计,2014,58(1):57-60.
[3] 吴栋栋,邵毅,景谦平等.北京交通拥堵引起的生态经济价值损失评估[J].生态经济,2013(4):75-79.
[4] 蒋应红.现代有轨电车系统在国内的发展前景探讨[J].交通与运输,2012(1):10-12.
[5] 蔡君时.城市轨道交通[M].上海:同济大学出版社,2000:13-18.
[6] 何利英.现代有轨电车在绿色公共交通中的应用现状[J].地下空间与工程学报,2012,(1):1576-1579.
[7] 王力.新型有轨电车的信号系统[J].铁道通信信号,2009,(1):33-34.
[8] C.C.Chan,K.T.Chau.Modern Electric Vehicle Technology[M].USA:Oxford University Press,2001:12-14.
[9] Xudong Wang,Fuzhong Wang,Shaobo Zhong.Development of Modern Tram Ground Operation Control System Elementary Prototype[C].International Conference on Electrical,Information Engineering and Mechatronics,London,2011,138:1797-1804.
[10] Sophie Labbouz,Youssef Diab.Tram ways in Francebom again for urbanism[J].Nova Terra Connected Cities,2007(2):22.
[11] 张志恒,李丽兰.现代有轨电车全电子道岔模块设计[J].电子技术与软件工程,2014(4):142-143.
[12] 何涛,范多旺,魏宗寿.计算机联锁全电子三相交流转辙机控制模块[J].铁道学报,2011,33(4):80-83.
[13] Antonio Hernando,Eugenio Roanes-Lozano,Roberto Maestre-Martinez,Jorge Tejedor.Alogic-algebraic approach to decision taking in a railway interlocking system.Annals of Mathematics and Artificial Intelligence,2012,Vol.65(4).